空地协作属于多智能体协作中的异构智能体协作,是当今多智能体研究领域的热点。系统分利用了异构多机器人的功能互补性,组成跨域协作系统,实现任务协同和信息共享,从本质上提升了面对复杂环境和任务规划的感知能力、执行能力和运行效率。

空地协同系统中多智能体平台包含无人机与无人车两类。由于二者在动力学、运动速度、传感器配置、通信功能、载重、续航等方面的巨大差异性和局限性,一方面在一定程度上降低了各自独立执行任务的效率;另一方面,由于二者在功能特点上的互补性,使得由无人机、无人车在互相协同下能够完成各种复杂任务。
为了能使无人机、无人车智能体平台实现优势互补,整个空地系统需要处理来自完全不同的智能体平台数据,并依据决策分析模块,有效协同无人机和无人车平台的运动和任务执行控制,如下图所示。如何基于空地协同多智能体平台开展面向任务的协同算法研究便成为研究领域的热点和重点。
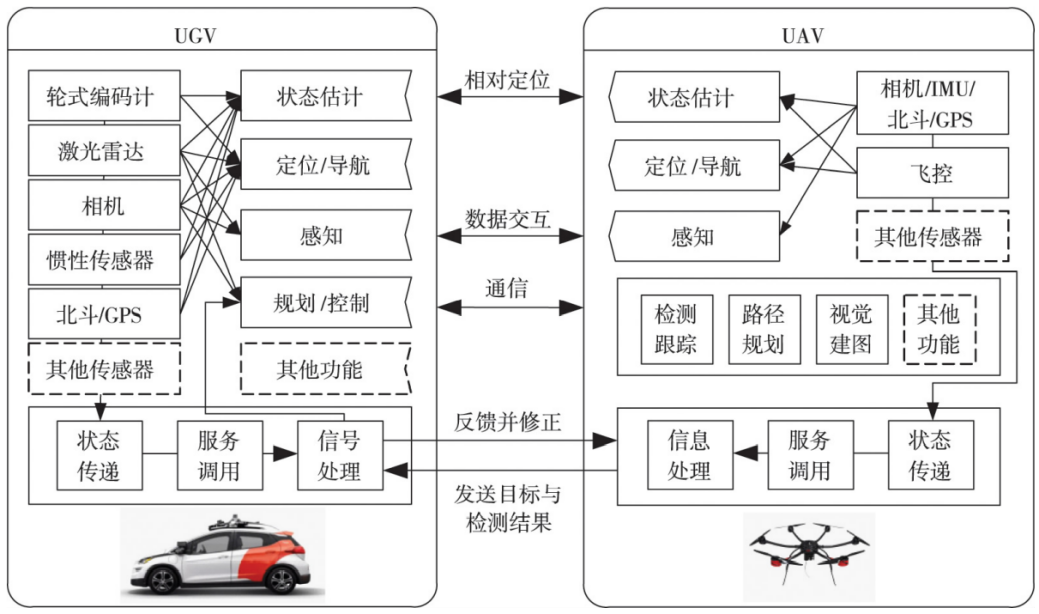
空地协同系统架构图
飞思实验室空地协同算法开发验证平台
01 平台介绍
飞思实验室基于多智能体空地协同的研究热点和重点,为各研究单位提供了一套完整的空地协同算法开发验证平台,这里介绍最经典的室内光学动捕版本。
多智能体空地协同算法开发验证平台,具备室内无人机定位与无人机、无人车集群控制能力,与天地协同集群控制地面站配合使用,可为无人机、无人车群集教学与研发提供教学演示快速研发平台,提高教学研一体化能力,同时可快速检验与演示无人机、无人车集群控制算法研发成果。
具体功能如下:
-
具有精准且实时的智能体无人机、智能体无人车定位功能;
-
具有记录智能体无人机、智能体无人车运动轨迹能力;
-
具有实时解算六自由度位姿功能;
-
具有多智能体无人机、智能体无人车协同控制能力;
-
具有多智能体无人机、智能体无人车协同运动规划能力;
-
具有智能体无人机、智能体无人车协同控制二次开发接口;
-
具有智能体无人机、智能体无人车控制与协同控制代码完全开源,支持算法修改能力;
-
具有精准且实时的智能体无人机、智能体无人车定位功能;
-
具有完整的实验辅助资料以及示例算法代码;
10.智能体无人机智能体无人车协同控制实例包含:
①多智能体无人机协同顺序编队圆周飞行;
②多智能体无人机协同顺序编队主从跟随;
③智能体无人机智能体无人车空地协同;
④ 智能体无人机车载起降;
02 平台设计
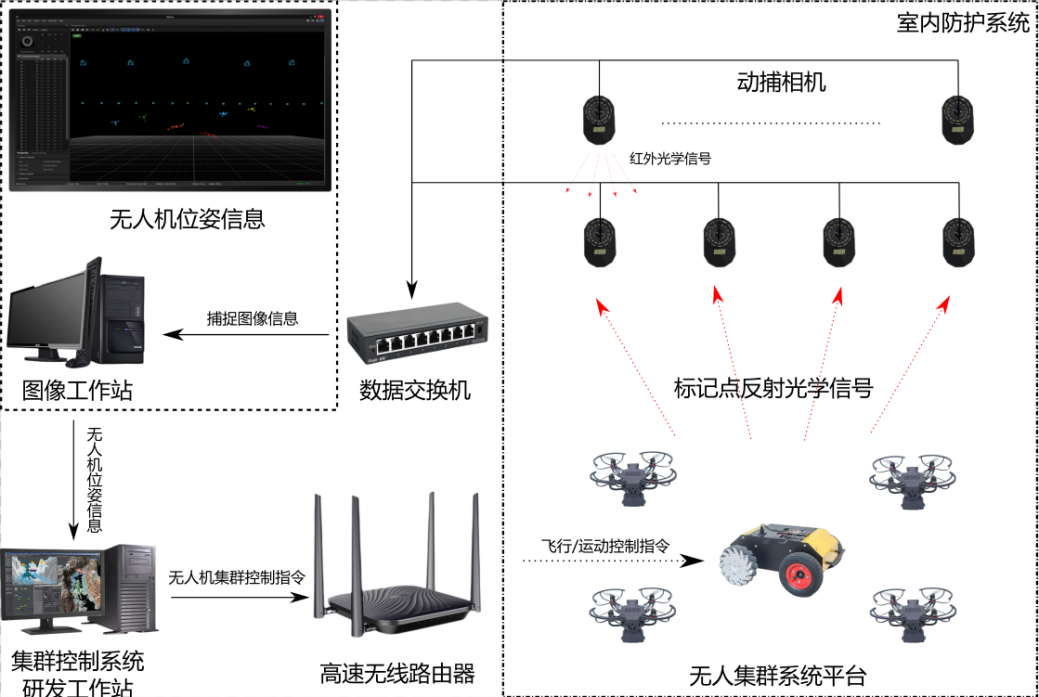
飞思实验室的多智能体空地协同算法开发验证平台主要由室内光学定位系统、多智能体协同控制系统、智能体无人机、智能体无人车四部分组成。包含室内光学定位系统1套,为无人机提供高精度豪米级跟踪定位能力,多智能体协同控制系统1套,提供无人系统协同控制与任务规划能力,智能体无人机N架,智能体无人车N辆,用于开展多智能体协同任务规划、协同控制等相关研究与教学实验演示。
平台的系统架构和空间布局图如下图所示:
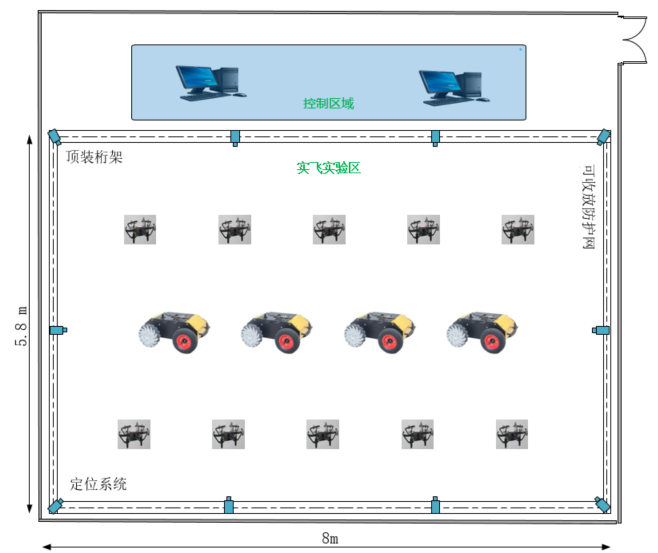
2.1
室内光学定位系统
室内光学定位系统布置在实飞实验区域四周,布置区域大小根据科研场所现场而定,主要设备由运动捕捉摄像机、图像定位处理工作站、图像定位解算软件、反光标识点等4部分构成。
室内光学定位系统提供高精度毫米级无人系统跟踪定位能力,以每秒100帧以上的拍摄速率捕捉无人机上固定的特制的标记点,为无人系统协同控制提供导航与跟踪控制能力。采用顶装桁架围绕飞行区域布置一套运动捕捉摄像机对整个飞行区域进行视觉定位覆盖。
01/运动捕捉摄像机
在所需的最大高度的捕获空间安装相机,将相机等距的环绕分布在捕获区域,调整摄像机的角度,朝向捕捉空间中心,镜头均匀分布可以使镜头覆盖场地范围更大,能够尽可能减少盲区。从而可以保证测得的数据更加准确,误差最小。
02/图像定位处理工作站
图像定位处理工作站作为图像解算设备,能够根据运动捕捉摄像机捕获的2D图像解算出3D空间和运动物体的六自由度位姿,即三自由度位置(X, Y,Z坐标)和三自由度姿态(俯仰角,偏航角和滚转角)。
03/图像定位解算软件
该软件支持一键式创建刚体,支持编辑刚体的属性,实时输出位置(X,Y,Z)和姿态(Pitch, Yaw, Roll)。通过接收无人机上光标标记点的二维坐标数据,计算反光标记点的3D坐标,确定出无人机的位置及朝向,实现无人机的定位与跟踪;
2.2
智能体无人机
飞行实验平台采用四旋翼机型,具有飞行时间长、载重大、飞行稳定等特点。使用高精度3D打印技术制造,机体小巧轻便,飞行时间长。内部采用激光定高和光流定点,性能优秀,飞行稳定,使用简单,一键起降。搭载协同控制与通讯模块,满足室内智能体无人机协同控制需求。

2.3
智能体无人车
应用高强度铝合金设计制造,载重大、减振性能强、运行时间长。运行稳定,使用简单;支持智能体无人车协同控制;采用后置麦克纳姆轮设计,转弯半径小;可与智能体无人机结合进行天地一体协同控制。

2.4
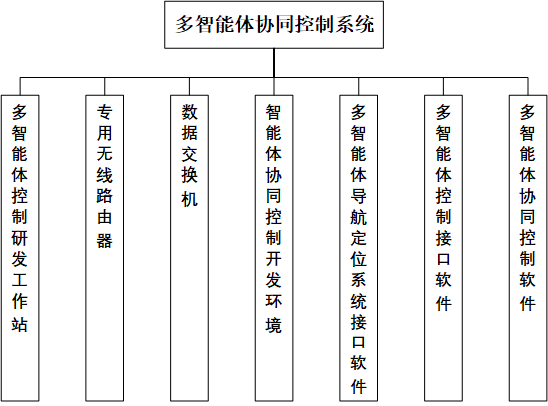
多智能体协同控制系统
多智能体协同控制系统为多智能体协同飞行、任务规划控制提供基础平台,主要包括多智能体控制研发工作站、专用无线路由器、数据交换机、多智能体协同控制开发环境、多智能体导航定位系统接口软件、多智能体控制接口软件、多智能体协同控制软件等7个部分组成。
平台典型应用案例
飞思实验室多智能体空地协同算法开发验证平台,算法测试效果图如下: