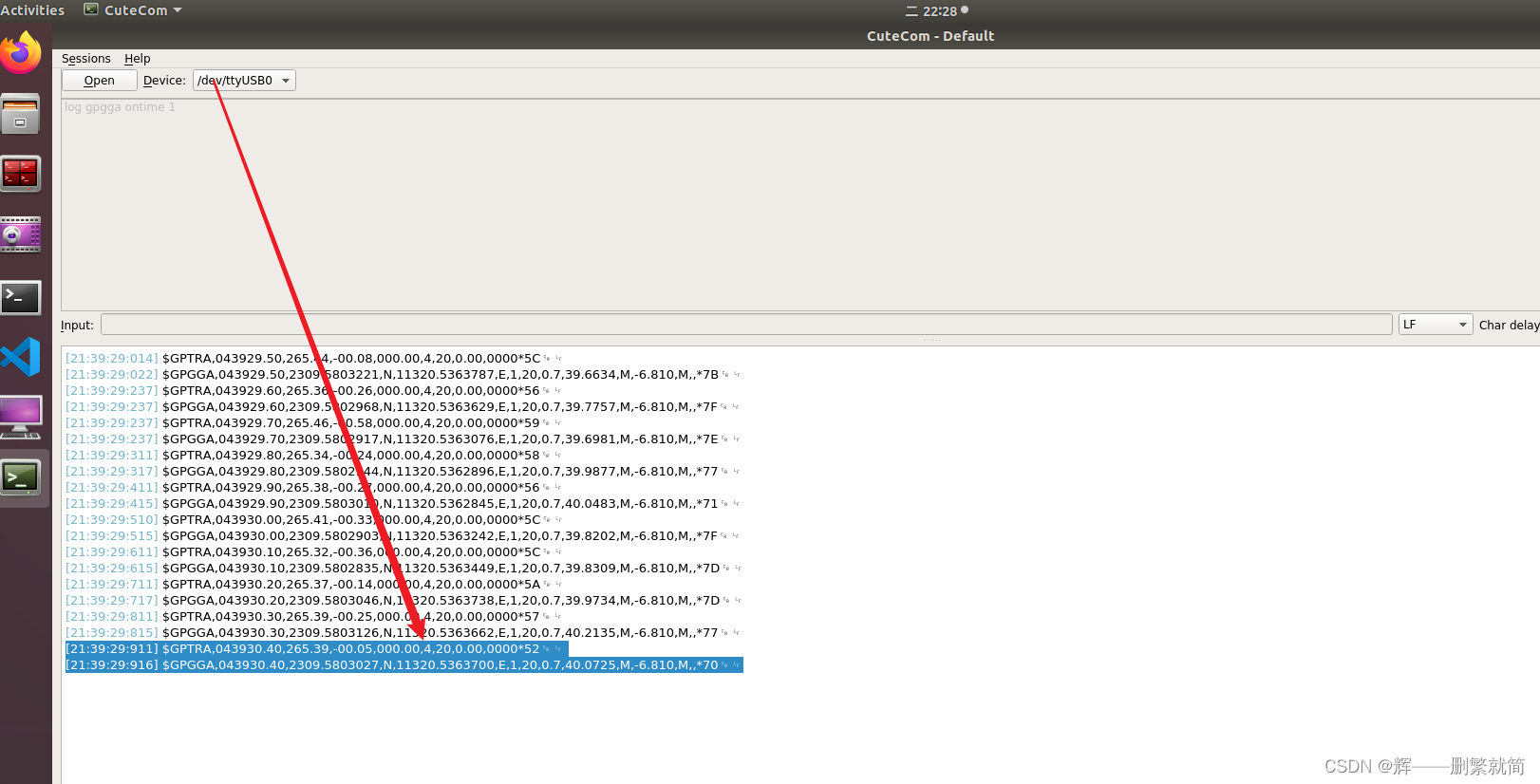
所用设备的输出:
[21:39:29:911] $GPTRA,043930.40,265.39,-00.05,000.00,4,20,0.00,0000*52␍␊
[21:39:29:916] $GPGGA,043930.40,2309.5803027,N,11320.5363700,E,1,20,0.7,40.0725,M,-6.810,M,,*70␍␊
其中GPTRA获取到的是航向信息,GPGGA获取到的是位置信息和差分状态信息,具体每个数字代表的是什么意思,可以查看NEMA协议
在基础的gps导航中,只要获取到小车的航向偏差,位置偏差就可以让小车按照预定的轨迹行走。这其中用到的便是航向与位置。第一步要做的就是把它们发布成话题发布出来。
使用的环境是ubuntu18.04+ros(melodic)。
代码:
gps.msg
Header header #时间包头
#string utc_time #utc时间 eg:073617.90 表示07时36分17.9秒
float64 latitude #纬度
float64 longitude #经度
int32 satellite_num #可搜索卫星数
int32 gps_status # GPS状态
float64 elevation #高程值
float64 time_diff #差分延时
float64 speed #速度
float64 roll_angle #横滚角
float64 heading_angle #航向角
pub_gps.cpp
其中串口号需要根据插入设备在自己机器上的情况进行修改。
可以先通过sudo apt-get install cutecom安装cutecom,再在终端使用sudo cutecom查看
头文件
//头文件
#ifndef _PUB_ANDROID_H
#define _PUB_ANDROID_H
#include "ros/ros.h"
#include "pub_gps/double_gps.h"
#include <sstream>
#include <serial/serial.h>
#include <ctime>
#include <iostream>
#include <cstdlib>
#include <libudev.h>
using namespace std;
tm time_struct = {0};class GPSParser {
public:GPSParser();~GPSParser();void run();private:void parseData(const std::string &data);private:ros::NodeHandle nh_;ros::Publisher pub_gps_data_;serial::Serial ser_;ros::Rate loop_rate_;
};
#endif
源文件
#include "pub_gps/pub_Android.h"GPSParser::GPSParser(): loop_rate_(100) // 定义定时器的频率为100Hz
{pub_gps_data_ = nh_.advertise<pub_gps::double_gps>("/GpsData", 100);std::string port = "/dev/tty_doubleGps"; // 假设串口号为 绑定串口号unsigned long baudrate = 115200;try {ser_.setPort(port);ser_.setBaudrate(baudrate);serial::Timeout to = serial::Timeout::simpleTimeout(1000);ser_.setTimeout(to);ser_.open();} catch (serial::IOException &e) {ROS_ERROR_STREAM("Unable to open port.");return;}if (ser_.isOpen()) {ROS_INFO_STREAM("Serial Port initialized.");} else {return;}
}GPSParser::~GPSParser()
{ser_.close();
}void GPSParser::run()
{while (ros::ok()) {if (ser_.available()) {std::string raw_data = ser_.readline();parseData(raw_data);}ros::spinOnce();loop_rate_.sleep(); // 等待定时器到期,以达到设定的频率}
}void GPSParser::parseData(const std::string &data)
{pub_gps::double_gps gps_data;std::istringstream ss(data);std::string token;std::getline(ss, token, ','); // 包头gps_data.header.stamp = ros::Time::now();gps_data.header.frame_id = "gps_link";gps_data.header.seq = 1;std::getline(ss, token, ','); // utc时间戳std::getline(ss, token, ','); // 纬度gps_data.latitude = std::stold(token);std::getline(ss, token, ','); // 经度gps_data.longitude = std::stold(token);std::getline(ss, token, ','); // 卫星数目gps_data.satellite_num = std::stoi(token);std::getline(ss, token, ','); // 差分状态gps_data.gps_status = std::stoi(token);std::getline(ss, token, ','); // 高程gps_data.elevation = std::stold(token);std::getline(ss, token, ','); // 差分延时gps_data.time_diff = std::stold(token);std::getline(ss, token, ','); // 速度gps_data.speed = std::stold(token);std::getline(ss, token, ','); // 横滚gps_data.roll_angle = std::stold(token);std::getline(ss, token); // 航向gps_data.heading_angle = std::stold(token);pub_gps_data_.publish(gps_data);
}int main(int argc, char **argv)
{ros::init(argc, argv, "gps_parser_node");GPSParser gps_parser;gps_parser.run();return 0;
}CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(pub_gps)find_package(catkin REQUIRED COMPONENTSgeometry_msgsroscppsensor_msgsserialstd_msgsmessage_generation
)add_message_files(FILESdouble_gps.msg
)
## Generate added messages and services with any dependencies listed here
generate_messages(DEPENDENCIESstd_msgs
)catkin_package(
# INCLUDE_DIRS include
# LIBRARIES pub_gpsCATKIN_DEPENDS geometry_msgs roscpp sensor_msgs serial std_msgs message_runtime
# DEPENDS system_lib
)include_directories(include ${catkin_INCLUDE_DIRS}
)add_executable(pub_gps src/pub_gps.cpp)add_executable(pub_Android src/pub_Android.cpp)add_dependencies(pub_gps ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})add_dependencies(pub_Android ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
target_link_libraries(pub_gps${catkin_LIBRARIES})
target_link_libraries(pub_Android${catkin_LIBRARIES}udev
)
package.xml
<?xml version="1.0"?>
<package format="2"><name>pub_gps</name><version>0.0.0</version><description>The pub_gps package</description><!-- One maintainer tag required, multiple allowed, one person per tag --><!-- Example: --><!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> --><maintainer email="pc@todo.todo">pc</maintainer><!-- One license tag required, multiple allowed, one license per tag --><!-- Commonly used license strings: --><!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 --><license>TODO</license><!-- Url tags are optional, but multiple are allowed, one per tag --><!-- Optional attribute type can be: website, bugtracker, or repository --><!-- Example: --><!-- <url type="website">http://wiki.ros.org/pub_gps</url> --><!-- Author tags are optional, multiple are allowed, one per tag --><!-- Authors do not have to be maintainers, but could be --><!-- Example: --><!-- <author email="jane.doe@example.com">Jane Doe</author> --><!-- The *depend tags are used to specify dependencies --><!-- Dependencies can be catkin packages or system dependencies --><!-- Examples: --><!-- Use depend as a shortcut for packages that are both build and exec dependencies --><!-- <depend>roscpp</depend> --><!-- Note that this is equivalent to the following: --><!-- <build_depend>roscpp</build_depend> --><!-- <exec_depend>roscpp</exec_depend> --><!-- Use build_depend for packages you need at compile time: --><!-- <build_depend>message_generation</build_depend> --><!-- Use build_export_depend for packages you need in order to build against this package: --><!-- <build_export_depend>message_generation</build_export_depend> --><!-- Use buildtool_depend for build tool packages: --><!-- <buildtool_depend>catkin</buildtool_depend> --><!-- Use exec_depend for packages you need at runtime: --><!-- <exec_depend>message_runtime</exec_depend> --><!-- Use test_depend for packages you need only for testing: --><!-- <test_depend>gtest</test_depend> --><!-- Use doc_depend for packages you need only for building documentation: --><!-- <doc_depend>doxygen</doc_depend> --><buildtool_depend>catkin</buildtool_depend><build_depend>geometry_msgs</build_depend><build_depend>roscpp</build_depend><build_depend>sensor_msgs</build_depend><build_depend>serial</build_depend><build_depend>std_msgs</build_depend><build_depend>message_generation</build_depend><build_export_depend>geometry_msgs</build_export_depend><build_export_depend>roscpp</build_export_depend><build_export_depend>sensor_msgs</build_export_depend><build_export_depend>serial</build_export_depend><build_export_depend>std_msgs</build_export_depend><exec_depend>geometry_msgs</exec_depend><exec_depend>roscpp</exec_depend><exec_depend>sensor_msgs</exec_depend><exec_depend>serial</exec_depend><exec_depend>std_msgs</exec_depend><exec_depend>message_runtime</exec_depend><!-- The export tag contains other, unspecified, tags --><export><!-- Other tools can request additional information be placed here --></export>
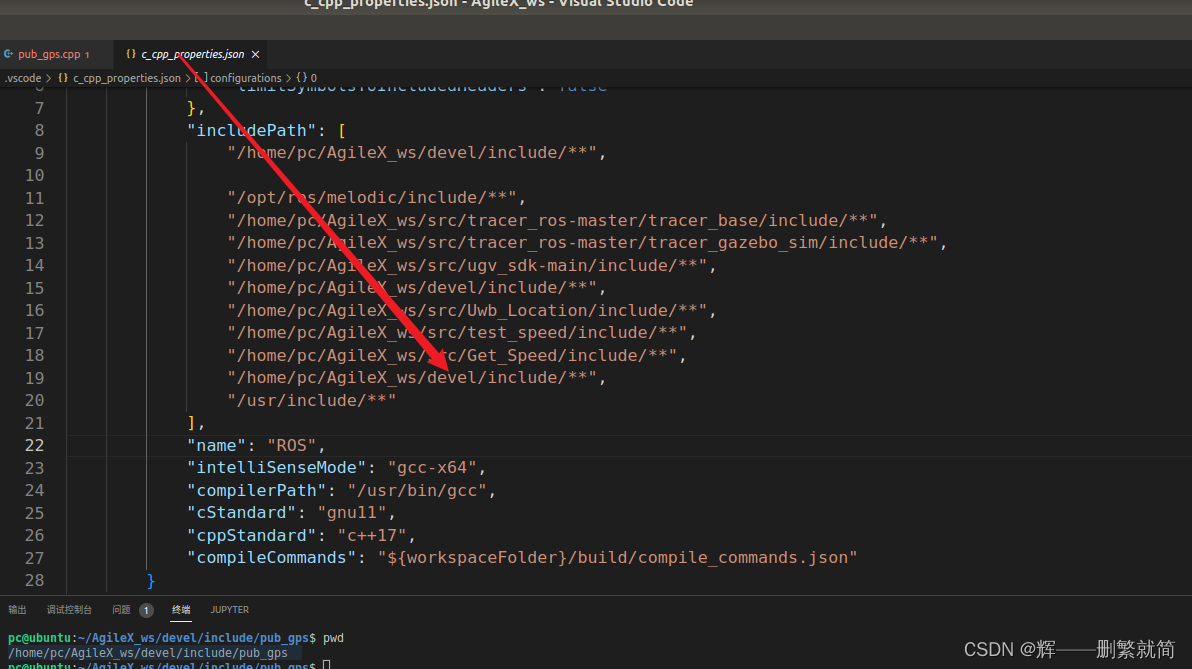
</package>我使用的编程环境是vscode。把整个功能包导入自己的工作空间后,由于使用了自定义的msg文件,需要在catkin_make后把build生成的gps.h文件的路径加入到c_cpp_properties.json文件里,具体为:
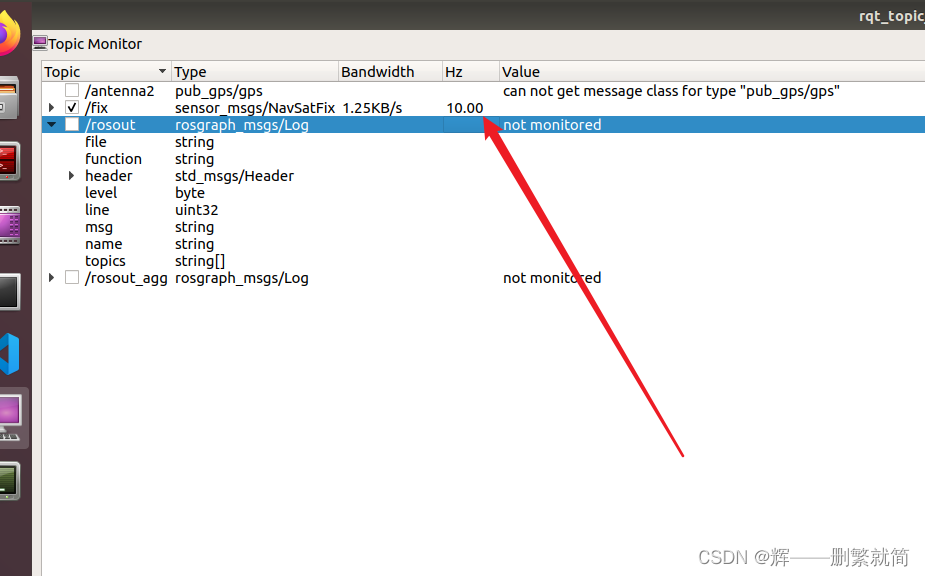
配置好后使用如下指令可以发布话题
rosrun pub_gps pub_gps
然后查看话题发布和话题的频率,这里我用的是10hz
后续会写怎么用gps+imu控制小车跑起来。