1.原理
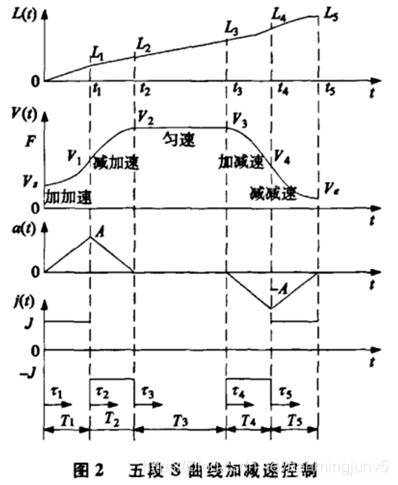
五段s曲线相较于三段s曲线而言加速度也是连续变化的,能适用于平稳性要求更高的场合。分为加加速、加减速、匀速、减加速、减减速这五段。
设除匀速段以为,其余四段的时间相等都为 Ta T a ,总时间为 T T ,匀速段速度为,四个变速段斜率大小都为 A A ,整段轨迹的总位移、加加速段位移 L1 L 1 、加减速段位移 L2 L 2
⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪Ta=vsA−−√L1=16AT3aL2=56AT3aT=4Ta+L−2L1−2L2vs { T a = v s A L 1 = 1 6 A T a 3 L 2 = 5 6 A T a 3 T = 4 T a + L − 2 L 1 − 2 L 2 v s
则加速度分段函数为
a=⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪At,(0≤t≤Ta)−A(t−2Ta),(Ta≤t≤2Ta)0,(2Ta≤t≤T−2Ta)−A[t−(T−2Ta)],(T−2Ta≤t≤T−Ta)A(t−T),(T−Ta≤t≤T) a = { A t , ( 0 ≤ t ≤ T a ) − A ( t − 2 T a ) , ( T a ≤ t ≤ 2 T a ) 0 , ( 2 T a ≤ t ≤ T − 2 T a ) − A [ t − ( T − 2 T a ) ] , ( T − 2 T a ≤ t ≤ T − T a ) A ( t − T ) , ( T − T a ≤ t ≤ T )
对加速度积分可得
v=⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪12At2,(0≤t≤Ta)−12A(t−2Ta)2+AT2a,(Ta≤t≤2Ta)vs,(2Ta≤t≤T−2Ta)−12A(t−T+2Ta)2+AT2a,(T−2Ta≤t≤T−Ta)12A(t−T)2,(T−Ta≤t≤T) v = { 1 2 A t 2 , ( 0 ≤ t ≤ T a ) − 1 2 A ( t − 2 T a ) 2 + A T a 2 , ( T a ≤ t ≤ 2 T a ) v s , ( 2 T a ≤ t ≤ T − 2 T a ) − 1 2 A ( t − T + 2 T a ) 2 + A T a 2 , ( T − 2 T a ≤ t ≤ T − T a ) 1 2 A ( t − T ) 2 , ( T − T a ≤ t ≤ T )
对速度积分可得到位移s的分段函数
s=⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪16At3,(0≤t≤Ta)−16A(t−2Ta)3+AT2at−AT3a,(Ta≤t≤2Ta)AT2at−AT3a,(2Ta≤t≤T−2Ta)−16A(t−T+2Ta)3+AT2at−AT2a,(T−2Ta≤t≤T−Ta)16A(t−T)3−2AT3a+AT2bT,(T−Ta≤t≤T) s = { 1 6 A t 3 , ( 0 ≤ t ≤ T a ) − 1 6 A ( t − 2 T a ) 3 + A T a 2 t − A T a 3 , ( T a ≤ t ≤ 2 T a ) A T a 2 t − A T a 3 , ( 2 T a ≤ t ≤ T − 2 T a ) − 1 6 A ( t − T + 2 T a ) 3 + A T a 2 t − A T a 2 , ( T − 2 T a ≤ t ≤ T − T a ) 1 6 A ( t − T ) 3 − 2 A T a 3 + A T b 2 T , ( T − T a ≤ t ≤ T )
3.matlab代码实现
指定位置、速度、斜率
clc;
clear;
%初始条件
x_arry=[0,10,20,30];
v_arry=[2,2,2];
A_arry=[3,3,3];
weiyi=[x_arry(1)];sudu=[0];shijian=[0];timeall=0;jiasudu=[0]
for i=1:1:length(x_arry)-1;
%清空a=[];v=[];s=[];
%计算加减速段的时间和位移L=x_arry(i+1)-x_arry(i);A=A_arry(i);vs=v_arry(i);Ta=sqrt(vs/A);L1=A*(Ta^3)/6;L2=A*(Ta^3)*(5/6);
%计算整段轨迹的总位移T=4*Ta+(L-2*L1-2*L2)/vs;for t=0:0.001:Tif t<=Ta;%加加速度阶段ad=A*t;vd=0.5*A*t^2;sd=(1/6)*A*t^3;a=[a,ad];v=[v,vd];s=[s,sd];elseif t>Ta && t<=2*Ta;%加减速阶段ad=-A*(t-2*Ta);vd=-0.5*A*(t-2*Ta)^2+A*Ta^2;sd=-(1/6)*A*(t-2*Ta)^3+A*Ta^2*t-A*Ta^3;a=[a,ad];v=[v,vd];s=[s,sd];elseif t>2*Ta && t<=T-2*Ta;%匀速阶段ad=0;vd=vs;sd=A*Ta^2*t-A*Ta^3; a=[a,ad];v=[v,vd];s=[s,sd];elseif t>T-2*Ta && t<=T-Ta;%减加度阶段ad=-A*(t-(T-2*Ta));vd=-0.5*A*(t-T+2*Ta)^2+A*Ta^2;sd=-(1/6)*A*(t-T+2*Ta)^3+A*Ta^2*t-A*Ta^3;a=[a,ad];v=[v,vd];s=[s,sd];elseif t>T-Ta && t<=T;%减减阶段ad=A*(t-T);vd=0.5*A*(t-T)^2;sd=(1/6)*A*(t-T)^3-2*A*Ta^3+A*Ta^2*T;a=[a,ad];v=[v,vd];s=[s,sd];endend
%时间time=[timeall:0.001:timeall+T];timeall=timeall+T;
%连接每一段轨迹weiyi=[weiyi,s(2:end)+x_arry(i)];sudu=[sudu,v(2:end)];jiasudu=[jiasudu,a(2:end)];shijian=[shijian,time(2:end)];
end
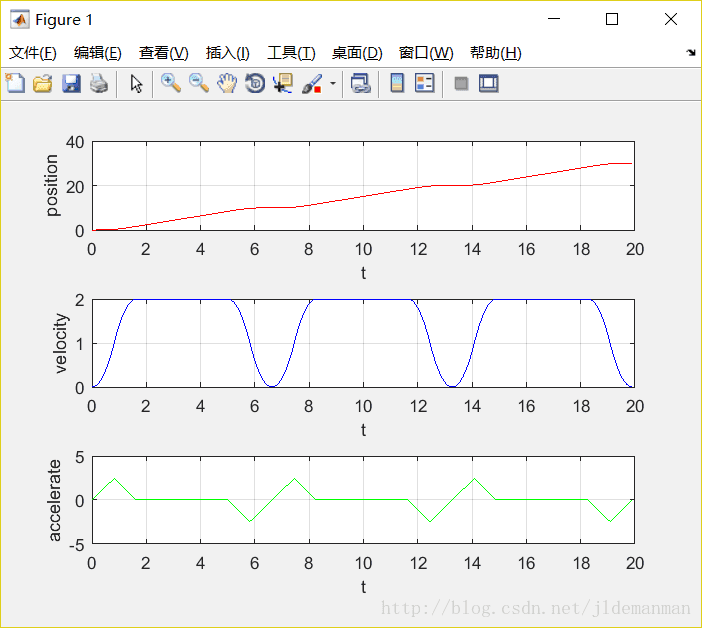
subplot(3,1,1),plot(shijian,weiyi,'r');xlabel('t'),ylabel('position');grid on;
subplot(3,1,2),plot(shijian,sudu,'b');xlabel('t'),ylabel('velocity');grid on;
subplot(3,1,3),plot(shijian,jiasudu,'g');xlabel('t'),ylabel('accelerate');grid on;结果如下