汽车毫米波雷达正在迎来大规模新旧技术替代周期。和高算力芯片、激光雷达、800万像素摄像头一样,时代抛弃你,只是时间问题。
作为业界首款专用16nm成像雷达处理器,恩智浦宣布S32R45已经投入量产,并将于2022年上半年开始首次用于客户量产。作为全球毫米波雷达芯片的头部供应商,恩智浦正在带动这一波4D成像雷达升级潮加速。
相比于传统毫米波雷达,4D成像雷达通过高分辨率点云来感知汽车周围环境,从而增强环境测绘和场景感知能力。在复杂的城市场景下,可通过这些图像对各种目标进行分类,包括弱势道路使用者和各种道路车辆。
此外,为了提升与摄像头、甚至是激光雷达的多感知融合,成像雷达必须能够测量最远300米以外目标的速度并同时进行分类。它还必须能够识别快速移动的汽车,将其与行驶缓慢的汽车甚至静态障碍物区分开,例如驾驶车道上掉落的轮胎。
就在日前的CES展上,恩智浦宣布,与毫米波雷达合作伙伴为升科(CubTEK)首发亮相基于上述芯片方案的4D成像雷达,能够提供类似图像的感知能力和小于0.1度的角度分辨率,实现增强4D感知功能。
一、
目前,在前装市场,4D成像雷达刚刚进入量产起步期。包括大陆集团、采埃孚、傲酷等第一批量产定点及交付正在进行中。而此次恩智浦与为升科的联手,意味着4D成像雷达赛道正式进入大规模定点周期。
其中,为升科的毫米波雷达已经在国内前五大商用车厂实现前装量产,在国内重卡牵引车前装雷达市场份额占比已经超过了50%。同时,该公司也拿下了国内前五大乘用车品牌的订单,从去年9月开始已经陆续交付。
而这次联手的更重大意义在于,中国市场将领跑全球。
一直以来,4D成像雷达的解决方案是基于多天线大规模MIMO设计方案,但由于成本和复杂度的限制,其应用范围非常有限。此外,一部分厂商还需要使用类似FPGA这样价格不菲的数据处理芯片,对于汽车制造商来说,并非最佳选择。
比如,Mobileye选择的软件定义数字成像雷达方案,逻辑之一,也是仅仅是利于FPGA或者通用SoC还不足以高效处理点云。“软件定义必须支持更大的灵活性,这需要复杂、专有的算法以及专用的SoC,从而提升数据处理能力。”
而作为传统雷达芯片方案商,恩智浦选择量身定制16nm雷达处理器,同时结合TEF82xx RFCMOS收发器,实现高角度分辨率、强大数据处理能力和更高性价比的量产成像雷达解决方案。
其中,TEF82xx可以实现多颗极联,采用16nm FinFET和40nm RFCMOS技术,去年开始批量生产。而S32R45则标志着恩智浦向Arm平台的迁移,上一代的S32R294则是基于恩智浦的z系列处理器内核。
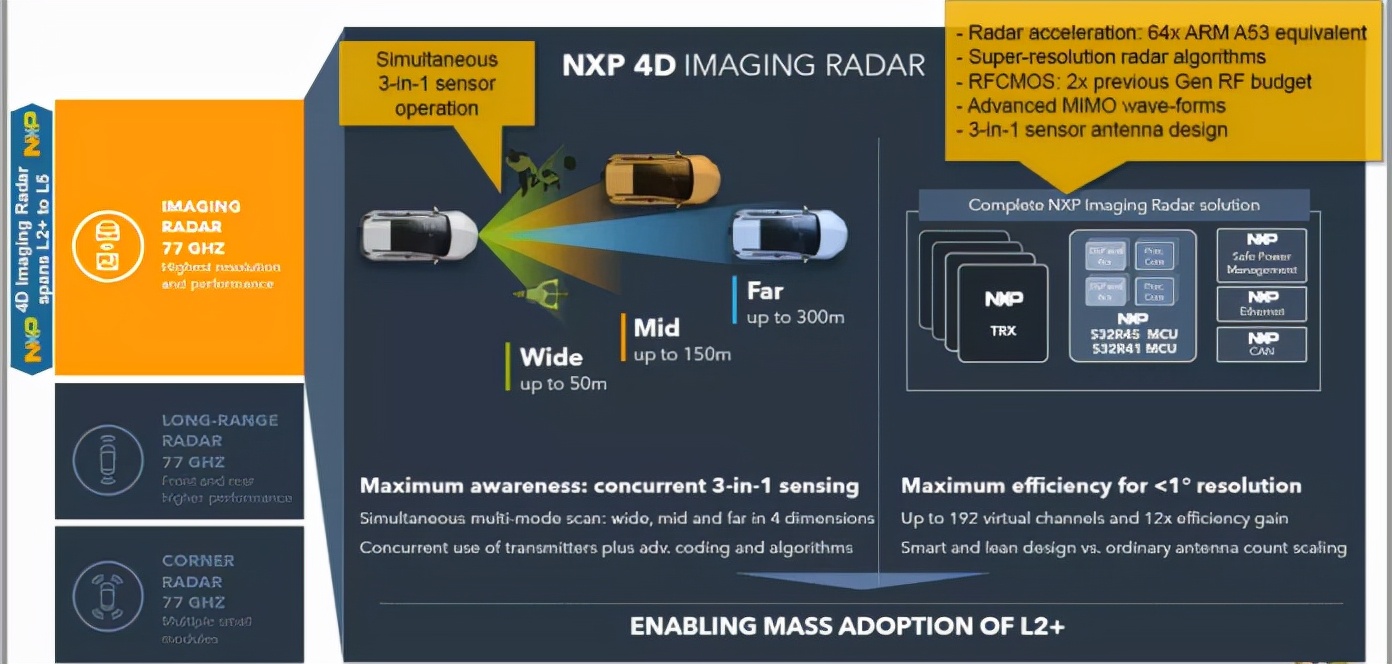
作为4D成像专有雷达硬件加速器,S32R45实现64倍标准处理器的计算性能,应用超分辨率雷达软件算法实现小于1度的角度分辨率,同时应用高级MIMO波形设计支持多个天线通道同时工作,从而实现雷达传感器性能的提升。
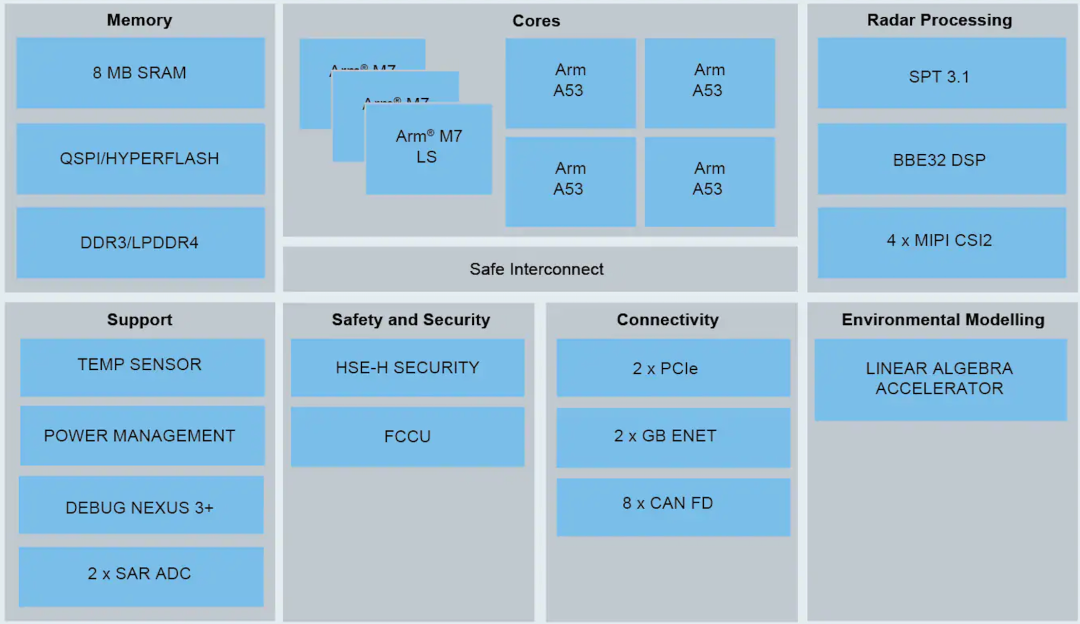
同时,4D成像雷达率先提供了短距、中距、长距三合一的并发多模雷达感测,可实现对汽车周围宽广视场的同时感知。为了达到这个目标,恩智浦利用创新架构,通过配置低复杂度传感器,实现192个虚拟天线通道,来提高原始传感器硬件的性能。
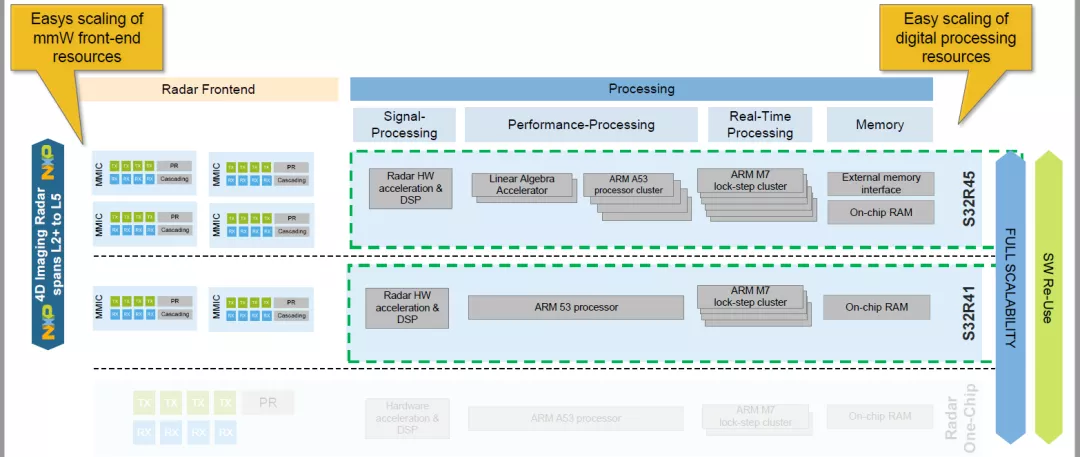
不过,S32R45雷达处理器是作为恩智浦第6代汽车雷达芯片组系列中的旗舰产品,主力市场是面向更高级别自动驾驶。为此,恩智浦再次推出更高性价比的雷达处理器S32R41,专为L2+自动辅助驾驶应用量身定制。
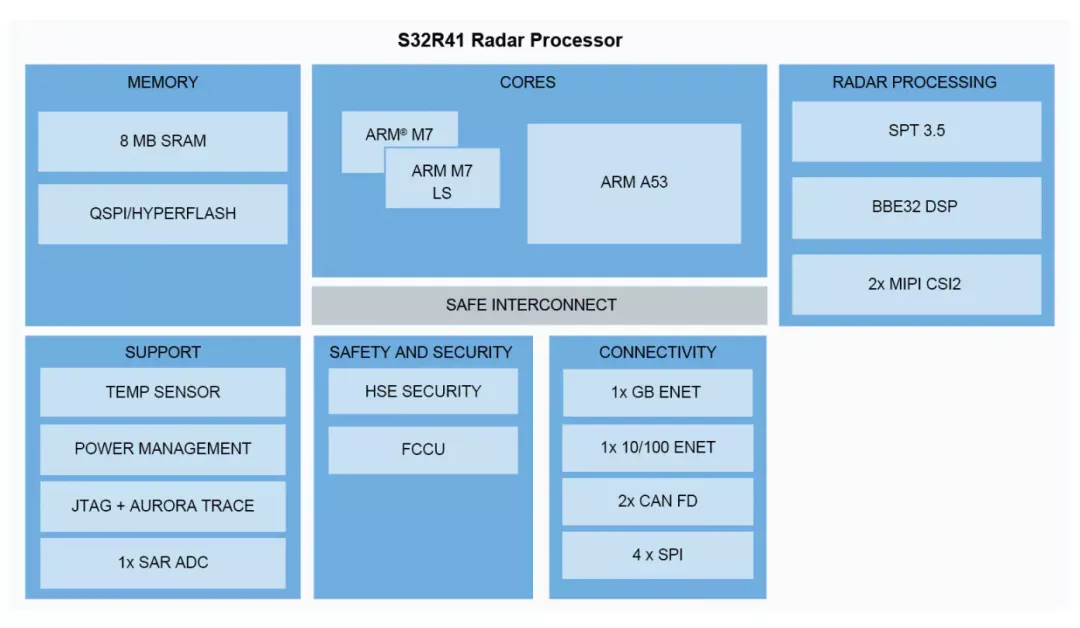
按照该公司给出的参考感知组合方案,S32R41可以满足最多六个角雷达、前向雷达和后向雷达,实现360度车身环绕感知。而S32R45则支持到L5级的应用,满足十个以上成像雷达的冗余感知组合,同时可以满足车路协同的路端感知需求。
为了能够满足下游客户的快速升级适配,S32R平台提供了通用架构,以实现软件复用和快速开发,同时还提供高性能的硬件安全引擎,支持OTA更新,符合新的网络安全标准。
同时,4D成像对于物体识别和分类的高要求,恩智浦也推出了一款车规级的AI工具包,除了应用于传统的视觉领域,4D成像雷达也将使用神经网络根据其点云图像对道路使用者及障碍物进行分类。
这种原始数据级的融合,可以大大提高目标检测的置信度、降低误检率和漏检率,意味着融合置信度可以得到大幅提升。这也是为什么之前特斯拉“放弃”传统毫米波雷达的原因之一。
二、
毫米波雷达市场的魅力,还在于前装用量的持续大幅增长。
高工智能汽车研究院监测数据显示,今年1-8月国内市场新车前装标配搭载前向雷达为432.66万颗,同比增长42.3%,前装搭载率为32.8%;前装标配搭载角雷达为379.57万颗,同比增长66.38%,前装搭载率为28.82%。
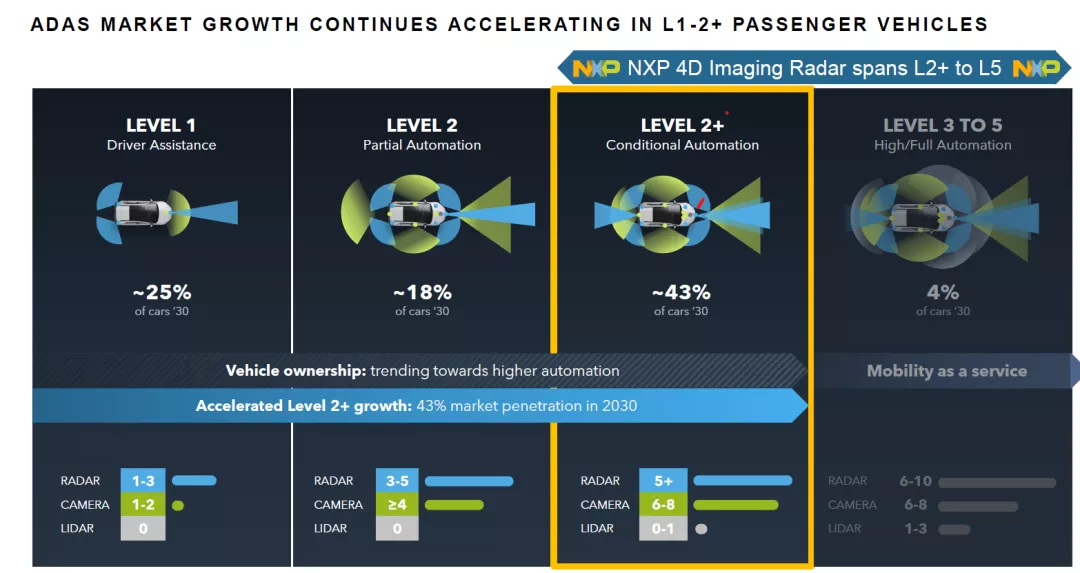
从单车配置数量来看,3R、5R正在成为市场主流。而按照恩智浦此前给出的数据,预计到2030年,车用毫米波雷达雷达的渗透率将攀升至55%。
接下来,国内市场L2+及以上新车搭载率有望在2025年突破50%。同时,4D成像雷达将从明年初开始小规模前装导入,预计到2023年,搭载量有机会突破百万颗,到2025年占全部前向毫米波雷达的比重有望超过40%。
无论是传统巨头还是新晋供应商,对于毫米波雷达(尤其是4D成像)市场的增量需求,不仅仅是看中数量的增加,还有能力的大幅提升。
“雷达提供的数据,比视觉系统提供的要复杂得多;不过,前者除了提供目标的位置之外,还提供距离和速度等信息,这是相当有价值的。”安波福相关负责人表示。
比如,高通公司本身不生产毫米波雷达,但通过在雷达上进行深度学习,来扩大雷达的性能。例如,通过使用高通内部开发的“雷达深度神经网络”,通过使用增强的雷达获得更高的分辨率和3D扫描。
更关键的是,相比于视觉处理,雷达数据处理的能耗更低。一组数据显示,一个处理6个近距离雷达数据的系统功耗约1W,而一个处理6个摄像头数据的系统则需要10W到15W。
在实际的道路场景应用上,此前安波福公司也给出了结合机器学习能力的一系列数据。比如,针对道路上的小物体或碎片,机器学习可以将雷达探测距离再提高50%以上,并能跟踪200米范围内的小物体。
比如,Arbe公司从一开始就思考如何将信号处理和人工智能置于现成的射频芯片组和数字信号处理器DSP之上,实现实时聚类、跟踪、自定位、假目标滤波、基于4D雷达和基于4D雷达+摄像头的融合目标分类。
而在过去几十年时间里,毫米波雷达经历过辉煌,也有一些挫折。从最早单雷达的ACC,到后来Mobileye视觉方案的大翻盘,再到如今的多传感器融合,4D雷达成为新的焦点。
传统视觉芯片方案提供商安霸半导体,在去年收购了4D成像雷达初创公司傲酷(Oculii),后者的自适应软件算法可以在传统雷达芯片基础上实现高分辨率、更长距离和更高的探测精度。
接下来,傲酷的4D雷达软件可以直接部署在安霸的CVflow®SoC上,甚至可以提升传统雷达的分辨率和探测精度,从而提供全天候、低成本和可扩展的融合感知解决方案。
按照一些公司的测算,4D成像雷达可以很快1-2年内达到目前传统雷达的成本,此外,考虑到软硬件解耦趋势,域控制器的算力还可以弥补4D成像雷达提供丰富点云数据处理的能力。同时,OTA更新已经成为下一代传感器的标配,实现硬件不变的情况下增加更多的功能应用。