2023年的深度学习入门指南(11) - Triton
上一篇我们学习了如何用CUDA进行编程。
下面我们将介绍几种深度学习GPU编程的优化方法。
第一种我们称之为多面体编译器。我们知道,在传统的IR,比如LLVM-IR中,使用条件分支来编码控制流信息。这种相对较低级的格式使得静态分析输入程序的运行时行为(例如缓存未命中)并通过使用平铺、融合和交换来自动优化循环变得困难。为了解决这个问题,多面体编译器依赖于具有静态可预测控制流的程序表示,从而实现对数据局部性和并行性的强大的编译时程序变换。比如最近很火的MLIR就是这样的技术。

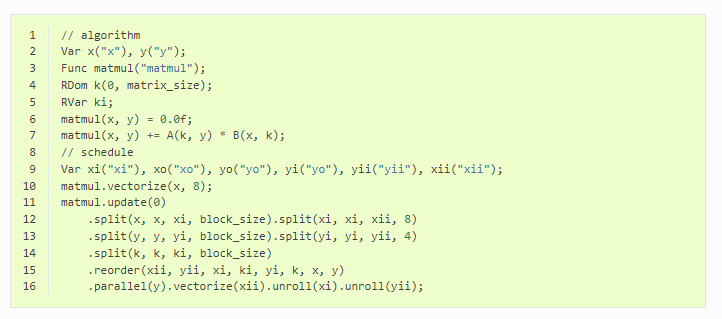
第二种叫做调度语言。这方面最流行的系统是TVM,它提供了跨广泛平台的良好性能以及内置的自动调度机制。分层原则是计算机科学中一个众所周知的设计原则:程序应该分解成模块化的抽象层,将其算法的语义与其实现的细节分开。像Halide和TVM这样的系统将这种理念推到了语法层面,通过使用调度语言在语法层面上强制实现这种分离。这种方法的好处在矩阵乘法的情况下尤其明显,如下所示,算法的定义(第1-7行)与其实现(第8-16行)是完全独立的,这意味着两者可以独立维护、优化和分发。
第三种就是Triton,Triton编译器大量使用块级数据流分析技术,该技术基于目标程序的控制流和数据流结构静态地调度迭代块。
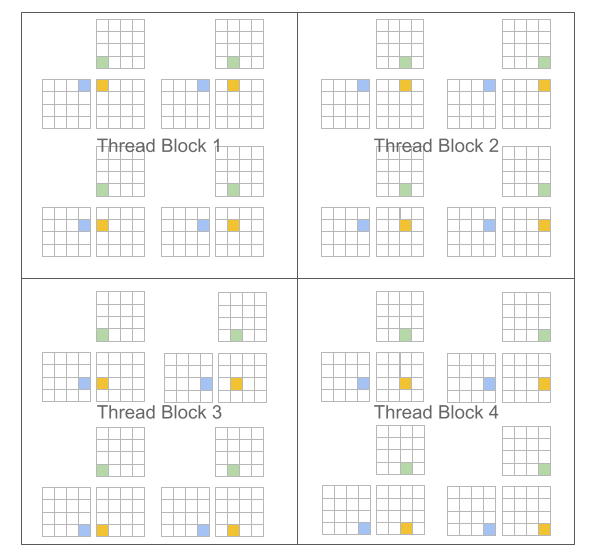
上篇我们花了不少精力算线程块,其实就是让大家理解,CUDA的线程在线程块中可能是很分散的:
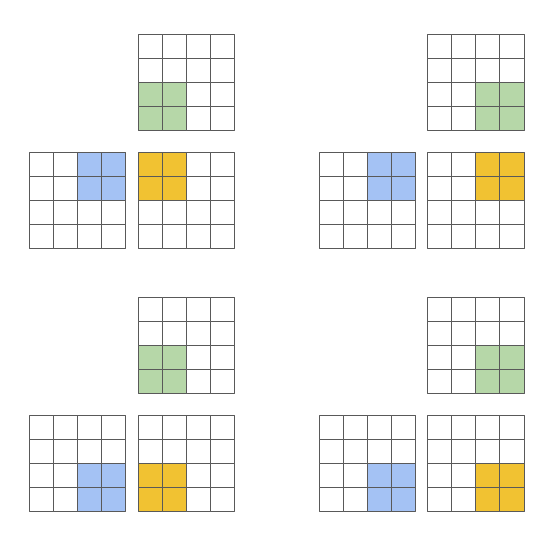
而Triton希望能够让它们更有组织一些:
为了解决这个问题,Triton编译器能够自动地应用很多种优化,例如自动合并、线程重组、预取、自动向量化、张量核心感知的指令选择、共享内存分配/同步、异步复制调度。
用Triton写核函数
我们先来看一下Triton的核函数是什么样子的:
@triton.jit
def add_kernel(x_ptr, # *Pointer* to first input vector.y_ptr, # *Pointer* to second input vector.output_ptr, # *Pointer* to output vector.n_elements, # Size of the vector.BLOCK_SIZE: tl.constexpr, # Number of elements each program should process.# NOTE: `constexpr` so it can be used as a shape value.
):# There are multiple 'programs' processing different data. We identify which program# we are here:pid = tl.program_id(axis=0) # We use a 1D launch grid so axis is 0.# This program will process inputs that are offset from the initial data.# For instance, if you had a vector of length 256 and block_size of 64, the programs# would each access the elements [0:64, 64:128, 128:192, 192:256].# Note that offsets is a list of pointers:block_start = pid * BLOCK_SIZEoffsets = block_start + tl.arange(0, BLOCK_SIZE)# Create a mask to guard memory operations against out-of-bounds accesses.mask = offsets < n_elements# Load x and y from DRAM, masking out any extra elements in case the input is not a# multiple of the block size.x = tl.load(x_ptr + offsets, mask=mask)y = tl.load(y_ptr + offsets, mask=mask)output = x + y# Write x + y back to DRAM.tl.store(output_ptr + offsets, output, mask=mask)
可以看到,跟我们之前写的CUDA代码似曾相识,只不过是cudaMemcpy之类的操作被封装了。
@triton.jit
def add_kernel(x_ptr, # *Pointer* to first input vector.y_ptr, # *Pointer* to second input vector.output_ptr, # *Pointer* to output vector.n_elements, # Size of the vector.BLOCK_SIZE: tl.constexpr, # Number of elements each program should process.# NOTE: `constexpr` so it can be used as a shape value.
):
@triton.jit: 这是一个Python装饰器,表示它是一个Triton内核函数,将由Triton编译器编译为GPU代码。
定义一个函数add_kernel,该函数接受四个参数:指向第一个输入向量的指针x_ptr、指向第二个输入向量的指针y_ptr、指向输出向量的指针output_ptr以及输入向量的大小n_elements。
BLOCK_SIZE: tl.constexpr: 定义一个常量BLOCK_SIZE,它表示每个线程块处理的元素个数,它的类型是tl.constexpr,表示它可以用作静态形状值。
pid = tl.program_id(axis=0)
获取当前程序所在的线程块ID。
block_start = pid * BLOCK_SIZE: 计算当前线程块处理的第一个元素的位置。
offsets = block_start + tl.arange(0, BLOCK_SIZE): 计算每个线程处理的元素位置。
mask = offsets < n_elements: 创建一个布尔掩码,用于过滤超出输入向量范围的元素。
x = tl.load(x_ptr + offsets, mask=mask): 从输入向量x中加载数据。
y = tl.load(y_ptr + offsets, mask=mask): 从输入向量y中加载数据。
output = x + y: 将x和y相加。
tl.store(output_ptr + offsets, output, mask=mask): 将结果写回到输出向量中。
操作都比较基本,就不多作解释了。
总结一下上面代码用到的Triton特性:
@triton.jit装饰器,用于将Python函数编译成GPU可执行的内核函数。tl.program_id函数,用于获取当前程序(或线程)的唯一索引,范围从0到总程序数减1。tl.grid_size函数,用于获取总程序数,等于启动内核时指定的块数乘以每块的线程数。tl.constexpr类型,用于声明一个常量表达式参数,可以在编译时确定其值,并用于指定数组或张量的形状。tl.arange函数,用于创建一个从0到指定值的连续整数序列,类似于Python中的range函数。tl.load函数,用于从全局内存中加载数据到寄存器中,可以指定一个偏移量和一个掩码。tl.store函数,用于将数据从寄存器中存储到全局内存中,可以指定一个偏移量和一个掩码。
这段代码的逻辑是这样的:
- 首先,根据当前程序的索引和每个程序应该处理的元素数(即块大小),计算出输入向量中的起始位置。
- 然后,根据起始位置和块大小,创建一个偏移量数组,表示每个程序要访问的输入元素的索引。
- 接着,创建一个掩码数组,用于过滤掉超出输入向量长度的偏移量。
- 然后,根据偏移量和掩码,从输入指针中加载x和y的元素到寄存器中,并计算它们的和。
- 最后,根据偏移量和掩码,将计算结果从寄存器中存储到输出指针中。
这样,每个程序都可以并行地处理一部分输入向量,并将结果写入输出向量中。这种方式可以提高内存访问的效率和并行度。
def add(x: torch.Tensor, y: torch.Tensor):# We need to preallocate the output.output = torch.empty_like(x)assert x.is_cuda and y.is_cuda and output.is_cudan_elements = output.numel()# The SPMD launch grid denotes the number of kernel instances that run in parallel.# It is analogous to CUDA launch grids. It can be either Tuple[int], or Callable(metaparameters) -> Tuple[int].# In this case, we use a 1D grid where the size is the number of blocks:grid = lambda meta: (triton.cdiv(n_elements, meta['BLOCK_SIZE']),)# NOTE:# - Each torch.tensor object is implicitly converted into a pointer to its first element.# - `triton.jit`'ed functions can be indexed with a launch grid to obtain a callable GPU kernel.# - Don't forget to pass meta-parameters as keywords arguments.add_kernel[grid](x, y, output, n_elements, BLOCK_SIZE=1024)# We return a handle to z but, since `torch.cuda.synchronize()` hasn't been called, the kernel is still# running asynchronously at this point.return output
上面这段代码主要就做了一件事,就是计算线程网格的合适大小,然后调用核函数。
torch.manual_seed(0)
size = 98432
x = torch.rand(size, device='cuda')
y = torch.rand(size, device='cuda')
output_torch = x + y
output_triton = add(x, y)
print(output_torch)
print(output_triton)
print(f'The maximum difference between torch and triton is 'f'{torch.max(torch.abs(output_torch - output_triton))}'
)
然后我们就用Triton的核函数与PyTorch的计算做一个对比,看看谁快。
tensor([1.3713, 1.3076, 0.4940, ..., 1.3374, 1.4960, 0.9115], device='cuda:0')
tensor([1.3713, 1.3076, 0.4940, ..., 1.3374, 1.4960, 0.9115], device='cuda:0')
The maximum difference between torch and triton is 0.0
在我的电脑上两者反正差不多。
求softmax的例子
我们再来看一个Triton的例子,求softmax.
还是先是核函数:
@triton.jit
def softmax_kernel(output_ptr, input_ptr, input_row_stride, output_row_stride, n_cols,BLOCK_SIZE: tl.constexpr
):# The rows of the softmax are independent, so we parallelize across thoserow_idx = tl.program_id(0)# The stride represents how much we need to increase the pointer to advance 1 rowrow_start_ptr = input_ptr + row_idx * input_row_stride# The block size is the next power of two greater than n_cols, so we can fit each# row in a single blockcol_offsets = tl.arange(0, BLOCK_SIZE)input_ptrs = row_start_ptr + col_offsets# Load the row into SRAM, using a mask since BLOCK_SIZE may be > than n_colsrow = tl.load(input_ptrs, mask=col_offsets < n_cols, other=-float('inf'))# Subtract maximum for numerical stabilityrow_minus_max = row - tl.max(row, axis=0)# Note that exponentiation in Triton is fast but approximate (i.e., think __expf in CUDA)numerator = tl.exp(row_minus_max)denominator = tl.sum(numerator, axis=0)softmax_output = numerator / denominator# Write back output to DRAMoutput_row_start_ptr = output_ptr + row_idx * output_row_strideoutput_ptrs = output_row_start_ptr + col_offsetstl.store(output_ptrs, softmax_output, mask=col_offsets < n_cols)
@triton.jit装饰器,用于将Python函数编译成GPU可执行的内核函数。tl.program_id函数,用于获取当前程序(或线程)的唯一索引,范围从0到总程序数减1。tl.constexpr类型,用于声明一个常量表达式参数,可以在编译时确定其值,并用于指定数组或张量的形状。tl.arange函数,用于创建一个从0到指定值的连续整数序列,类似于Python中的range函数。tl.load函数,用于从全局内存中加载数据到寄存器中,可以指定一个偏移量和一个掩码。tl.max函数,用于计算一个张量在给定轴上的最大值。tl.exp函数,用于计算一个张量的指数函数,类似于Python中的math.exp函数。注意这个函数是快速但近似的(类似于CUDA中的__expf函数)。tl.sum函数,用于计算一个张量在给定轴上的求和。tl.store函数,用于将数据从寄存器中存储到全局内存中,可以指定一个偏移量和一个掩码。
这段代码的逻辑是这样的:
- 首先,根据当前程序的索引和输入矩阵的行跨度(即每行占用的字节数),计算出输入矩阵中当前行的起始指针。
- 然后,根据块大小(即每个程序处理的列数),创建一个偏移量数组,表示每个程序要访问的输入元素的索引。注意块大小是大于等于列数的最小2的幂,所以可以保证每行可以被一个块完全处理。
- 接着,根据偏移量和掩码(用于过滤掉超出列数的偏移量),从输入指针中加载当前行的元素到寄存器中,并减去当前行的最大值,以提高数值稳定性。
- 然后,对减去最大值后的元素进行指数运算,并在给定轴上求和,得到分母。然后将分子除以分母,得到softmax输出。
- 最后,根据偏移量和掩码(用于过滤掉超出列数的偏移量),将softmax输出从寄存器中存储到输出指针中。
这样,每个程序都可以并行地处理输入矩阵的一部分,并将结果写入输出矩阵中。这种方式可以提高内存访问和计算的效率和并行度。
然后第二步,我们还是计算该用多少线程。
def softmax(x):n_rows, n_cols = x.shape# The block size is the smallest power of two greater than the number of columns in `x`BLOCK_SIZE = triton.next_power_of_2(n_cols)# Another trick we can use is to ask the compiler to use more threads per row by# increasing the number of warps (`num_warps`) over which each row is distributed.# You will see in the next tutorial how to auto-tune this value in a more natural# way so you don't have to come up with manual heuristics yourself.num_warps = 4if BLOCK_SIZE >= 2048:num_warps = 8if BLOCK_SIZE >= 4096:num_warps = 16# Allocate outputy = torch.empty_like(x)# Enqueue kernel. The 1D launch grid is simple: we have one kernel instance per row o# f the input matrixsoftmax_kernel[(n_rows,)](y,x,x.stride(0),y.stride(0),n_cols,num_warps=num_warps,BLOCK_SIZE=BLOCK_SIZE,)return y
其中输入矩阵 x 的形状为 (n_rows, n_cols),表示有 n_rows 个行和 n_cols 个列。首先通过 triton.next_power_of_2(n_cols) 函数求出大于等于 n_cols 的最小的 2 的幂,作为块大小 BLOCK_SIZE。然后,根据 BLOCK_SIZE 的大小确定每个行使用的线程块数 num_warps。根据经验,当 BLOCK_SIZE 大于等于 2048 时,num_warps 设置为 8,当 BLOCK_SIZE 大于等于 4096 时,设置为 16。接着,为输出矩阵 y 分配与 x 相同的空间。最后,通过 softmax_kernel 函数计算 softmax,并将结果保存在 y 中。注意,softmax_kernel 函数接受的参数包括输入和输出矩阵指针、输入和输出矩阵行跨度、矩阵列数、线程块大小和行使用的线程块数。
然后我们跟PyTorch的比一下:
@torch.jit.script
def naive_softmax(x):"""Compute row-wise softmax of X using native pytorchWe subtract the maximum element in order to avoid overflows. Softmax is invariant tothis shift."""# read MN elements ; write M elementsx_max = x.max(dim=1)[0]# read MN + M elements ; write MN elementsz = x - x_max[:, None]# read MN elements ; write MN elementsnumerator = torch.exp(z)# read MN elements ; write M elementsdenominator = numerator.sum(dim=1)# read MN + M elements ; write MN elementsret = numerator / denominator[:, None]# in total: read 5MN + 2M elements ; wrote 3MN + 2M elementsreturn ret
最后对比下结果是不是一样:
torch.manual_seed(0)
x = torch.randn(1823, 781, device='cuda')
y_triton = softmax(x)
y_torch = torch.softmax(x, axis=1)
assert torch.allclose(y_triton, y_torch), (y_triton, y_torch)
计算注意力
下面我们结合之前学习的自注意力的知识,用Triton来写个注意力模型:
@triton.jit
def _fwd_kernel(Q, K, V, sm_scale,L, M,Out,stride_qz, stride_qh, stride_qm, stride_qk,stride_kz, stride_kh, stride_kn, stride_kk,stride_vz, stride_vh, stride_vk, stride_vn,stride_oz, stride_oh, stride_om, stride_on,Z, H, N_CTX,BLOCK_M: tl.constexpr, BLOCK_DMODEL: tl.constexpr,BLOCK_N: tl.constexpr,
):start_m = tl.program_id(0)off_hz = tl.program_id(1)# initialize offsetsoffs_m = start_m * BLOCK_M + tl.arange(0, BLOCK_M)offs_n = tl.arange(0, BLOCK_N)offs_d = tl.arange(0, BLOCK_DMODEL)off_q = off_hz * stride_qh + offs_m[:, None] * stride_qm + offs_d[None, :] * stride_qkoff_k = off_hz * stride_qh + offs_n[None, :] * stride_kn + offs_d[:, None] * stride_kkoff_v = off_hz * stride_qh + offs_n[:, None] * stride_qm + offs_d[None, :] * stride_qk# Initialize pointers to Q, K, Vq_ptrs = Q + off_qk_ptrs = K + off_kv_ptrs = V + off_v# initialize pointer to m and lm_prev = tl.zeros([BLOCK_M], dtype=tl.float32) - float("inf")l_prev = tl.zeros([BLOCK_M], dtype=tl.float32)acc = tl.zeros([BLOCK_M, BLOCK_DMODEL], dtype=tl.float32)# load q: it will stay in SRAM throughoutq = tl.load(q_ptrs)# loop over k, v and update accumulatorfor start_n in range(0, (start_m + 1) * BLOCK_M, BLOCK_N):# -- compute qk ----k = tl.load(k_ptrs)qk = tl.zeros([BLOCK_M, BLOCK_N], dtype=tl.float32)qk += tl.dot(q, k)qk *= sm_scaleqk = tl.where(offs_m[:, None] >= (start_n + offs_n[None, :]), qk, float("-inf"))# compute new mm_curr = tl.maximum(tl.max(qk, 1), m_prev)# correct old ll_prev *= tl.exp(m_prev - m_curr)# attention weightsp = tl.exp(qk - m_curr[:, None])l_curr = tl.sum(p, 1) + l_prev# rescale operands of matmulsl_rcp = 1. / l_currp *= l_rcp[:, None]acc *= (l_prev * l_rcp)[:, None]# update accp = p.to(Q.dtype.element_ty)v = tl.load(v_ptrs)acc += tl.dot(p, v)# update m_i and l_il_prev = l_currm_prev = m_curr# update pointersk_ptrs += BLOCK_N * stride_knv_ptrs += BLOCK_N * stride_vk# rematerialize offsets to save registersstart_m = tl.program_id(0)offs_m = start_m * BLOCK_M + tl.arange(0, BLOCK_M)# write back l and ml_ptrs = L + off_hz * N_CTX + offs_mm_ptrs = M + off_hz * N_CTX + offs_mtl.store(l_ptrs, l_prev)tl.store(m_ptrs, m_prev)# initialize pointers to outputoffs_n = tl.arange(0, BLOCK_DMODEL)off_o = off_hz * stride_oh + offs_m[:, None] * stride_om + offs_n[None, :] * stride_onout_ptrs = Out + off_otl.store(out_ptrs, acc)
代码是Triton中的一个内核函数,用于将一个批次的输入Q、K、V矩阵与权重矩阵相乘,然后执行 softmax 操作。具体来说,此内核函数通过计算每个位置的加权和,并将其存储在输出矩阵中来实现self-attention操作。在计算期间,每个线程块处理一个输入矩阵行的一部分,并将其存储在共享内存中,以便在处理其他行时可以重用该数据。
它的功能是根据输入的查询矩阵Q、键矩阵K和值矩阵V,计算输出矩阵Out,其中Out[i,j,:]是Q[i,:]和V[j,:]的加权平均,权重由Q[i,:]和K[j,:]的点积决定。它使用了以下的Triton特性:
tl.arange函数,用于创建一个从0到指定值的连续整数序列,类似于Python中的range函数。tl.zeros函数,用于创建一个给定形状和类型的全零张量。tl.dot函数,用于计算两个张量的点积。tl.where函数,用于根据一个条件张量选择两个输入张量中的元素。tl.maximum函数,用于计算两个张量在给定轴上的最大值。tl.max函数,用于计算一个张量在给定轴上的最大值。tl.exp函数,用于计算一个张量的指数函数,类似于Python中的math.exp函数。注意这个函数是快速但近似的(类似于CUDA中的__expf函数)。tl.sum函数,用于计算一个张量在给定轴上的求和。
再看下一段:
@triton.jit
def _bwd_preprocess(Out, DO, L,NewDO, Delta,BLOCK_M: tl.constexpr, D_HEAD: tl.constexpr,
):off_m = tl.program_id(0) * BLOCK_M + tl.arange(0, BLOCK_M)off_n = tl.arange(0, D_HEAD)# loado = tl.load(Out + off_m[:, None] * D_HEAD + off_n[None, :]).to(tl.float32)do = tl.load(DO + off_m[:, None] * D_HEAD + off_n[None, :]).to(tl.float32)denom = tl.load(L + off_m).to(tl.float32)# computedo = do / denom[:, None]delta = tl.sum(o * do, axis=1)# write-backtl.store(NewDO + off_m[:, None] * D_HEAD + off_n[None, :], do)tl.store(Delta + off_m, delta)
这段代码定义了一个在反向传播中用到的 Triton 函数 _bwd_preprocess,它将 Out(前向传播的输出)、DO(当前反向传播的梯度值)和 L(前向传播中的标量指数)作为输入。BLOCK_M 是 Triton 的常量,表示每个 Triton 线程处理的条目数,D_HEAD 是另一个 Triton 常量,表示 Q/K/V 的头的维度。
函数的作用是执行一些预处理步骤,以便在后续的反向传播计算中使用。具体来说,它首先加载了 Out、DO 和 L 中的值,然后根据 L 中的标量指数计算了 do(即 d o u t i / ∑ j exp ( O u t i j ) d^{\mathrm{out}}i / \sum_j \exp{(\mathrm{Out}_{ij})} douti/∑jexp(Outij))。最后,函数计算了 Δ i = ∑ j O u t i j × d i j o u t \Delta_i = \sum_j \mathrm{Out}_{ij} \times d^{\mathrm{out}}_{ij} Δi=∑jOutij×dijout,并将 do 和 Delta 的值存储到 NewDO 和 Delta 中。
最后我们看反向传播的部分:
@triton.jit
def _bwd_kernel(Q, K, V, sm_scale, Out, DO,DQ, DK, DV,L, M,D,stride_qz, stride_qh, stride_qm, stride_qk,stride_kz, stride_kh, stride_kn, stride_kk,stride_vz, stride_vh, stride_vk, stride_vn,Z, H, N_CTX,num_block,BLOCK_M: tl.constexpr, BLOCK_DMODEL: tl.constexpr,BLOCK_N: tl.constexpr,
):off_hz = tl.program_id(0)off_z = off_hz // Hoff_h = off_hz % H# offset pointers for batch/headQ += off_z * stride_qz + off_h * stride_qhK += off_z * stride_qz + off_h * stride_qhV += off_z * stride_qz + off_h * stride_qhDO += off_z * stride_qz + off_h * stride_qhDQ += off_z * stride_qz + off_h * stride_qhDK += off_z * stride_qz + off_h * stride_qhDV += off_z * stride_qz + off_h * stride_qhfor start_n in range(0, num_block):lo = start_n * BLOCK_M# initialize row/col offsetsoffs_qm = lo + tl.arange(0, BLOCK_M)offs_n = start_n * BLOCK_M + tl.arange(0, BLOCK_M)offs_m = tl.arange(0, BLOCK_N)offs_k = tl.arange(0, BLOCK_DMODEL)# initialize pointers to value-like dataq_ptrs = Q + (offs_qm[:, None] * stride_qm + offs_k[None, :] * stride_qk)k_ptrs = K + (offs_n[:, None] * stride_kn + offs_k[None, :] * stride_kk)v_ptrs = V + (offs_n[:, None] * stride_qm + offs_k[None, :] * stride_qk)do_ptrs = DO + (offs_qm[:, None] * stride_qm + offs_k[None, :] * stride_qk)dq_ptrs = DQ + (offs_qm[:, None] * stride_qm + offs_k[None, :] * stride_qk)# pointer to row-wise quantities in value-like dataD_ptrs = D + off_hz * N_CTXm_ptrs = M + off_hz * N_CTX# initialize dv amd dkdv = tl.zeros([BLOCK_M, BLOCK_DMODEL], dtype=tl.float32)dk = tl.zeros([BLOCK_M, BLOCK_DMODEL], dtype=tl.float32)# k and v stay in SRAM throughoutk = tl.load(k_ptrs)v = tl.load(v_ptrs)# loop over rowsfor start_m in range(lo, num_block * BLOCK_M, BLOCK_M):offs_m_curr = start_m + offs_m# load q, k, v, do on-chipq = tl.load(q_ptrs)# recompute p = softmax(qk, dim=-1).T# NOTE: `do` is pre-divided by `l`; no normalization hereqk = tl.dot(q, tl.trans(k))qk = tl.where(offs_m_curr[:, None] >= (offs_n[None, :]), qk, float("-inf"))m = tl.load(m_ptrs + offs_m_curr)p = tl.exp(qk * sm_scale - m[:, None])# compute dvdo = tl.load(do_ptrs)dv += tl.dot(tl.trans(p.to(Q.dtype.element_ty)), do)# compute dp = dot(v, do)Di = tl.load(D_ptrs + offs_m_curr)dp = tl.zeros([BLOCK_M, BLOCK_N], dtype=tl.float32) - Di[:, None]dp += tl.dot(do, tl.trans(v))# compute ds = p * (dp - delta[:, None])ds = p * dp * sm_scale# compute dk = dot(ds.T, q)dk += tl.dot(tl.trans(ds.to(Q.dtype.element_ty)), q)# compute dqdq = tl.load(dq_ptrs)dq += tl.dot(ds.to(Q.dtype.element_ty), k)tl.store(dq_ptrs, dq)# increment pointersdq_ptrs += BLOCK_M * stride_qmq_ptrs += BLOCK_M * stride_qmdo_ptrs += BLOCK_M * stride_qm# write-backdv_ptrs = DV + (offs_n[:, None] * stride_qm + offs_k[None, :] * stride_qk)dk_ptrs = DK + (offs_n[:, None] * stride_kn + offs_k[None, :] * stride_kk)tl.store(dv_ptrs, dv)tl.store(dk_ptrs, dk)
这是实现Transformer网络中自注意力层的反向传播内核。它计算输入查询、键和值向量(dq、dk和dv)的梯度,给定输出张量(do)的梯度。在反向传播期间调用该内核以更新参数的梯度。
该内核在一个查询、键和值块上操作,其中每个块包含BLOCK_M个查询、BLOCK_M个键和BLOCK_N个值。计算在多个批次和头上并行进行,每个批次具有N_CTX个查询,每个头具有D_MODEL维度。
该函数以查询(Q)、键(K)、值(V)和输出梯度(DO)张量作为输入,以及softmax缩放因子(sm_scale)、块大小(BLOCK_M、BLOCK_N、BLOCK_DMODEL)和各种步幅等其他参数。它使用一系列矩阵乘法和约简计算来计算和更新输入张量(DQ、DK和DV)和其他辅助张量(L、M、D)的梯度。
最后,我们将其组合起来:
class _attention(torch.autograd.Function):@staticmethoddef forward(ctx, q, k, v, sm_scale):BLOCK = 128# shape constraintsLq, Lk, Lv = q.shape[-1], k.shape[-1], v.shape[-1]assert Lq == Lk and Lk == Lvassert Lk in {16, 32, 64, 128}o = torch.empty_like(q)grid = (triton.cdiv(q.shape[2], BLOCK), q.shape[0] * q.shape[1], 1)L = torch.empty((q.shape[0] * q.shape[1], q.shape[2]), device=q.device, dtype=torch.float32)m = torch.empty((q.shape[0] * q.shape[1], q.shape[2]), device=q.device, dtype=torch.float32)num_warps = 4 if Lk <= 64 else 8_fwd_kernel[grid](q, k, v, sm_scale,L, m,o,q.stride(0), q.stride(1), q.stride(2), q.stride(3),k.stride(0), k.stride(1), k.stride(2), k.stride(3),v.stride(0), v.stride(1), v.stride(2), v.stride(3),o.stride(0), o.stride(1), o.stride(2), o.stride(3),q.shape[0], q.shape[1], q.shape[2],BLOCK_M=BLOCK, BLOCK_N=BLOCK,BLOCK_DMODEL=Lk, num_warps=num_warps,num_stages=2,)# print(h.asm["ttgir"])ctx.save_for_backward(q, k, v, o, L, m)ctx.grid = gridctx.sm_scale = sm_scalectx.BLOCK_DMODEL = Lkreturn o@staticmethoddef backward(ctx, do):BLOCK = 128q, k, v, o, l, m = ctx.saved_tensorsdo = do.contiguous()dq = torch.zeros_like(q, dtype=torch.float32)dk = torch.empty_like(k)dv = torch.empty_like(v)do_scaled = torch.empty_like(do)delta = torch.empty_like(l)_bwd_preprocess[(ctx.grid[0] * ctx.grid[1], )](o, do, l,do_scaled, delta,BLOCK_M=BLOCK, D_HEAD=ctx.BLOCK_DMODEL,)_bwd_kernel[(ctx.grid[1],)](q, k, v, ctx.sm_scale,o, do_scaled,dq, dk, dv,l, m,delta,q.stride(0), q.stride(1), q.stride(2), q.stride(3),k.stride(0), k.stride(1), k.stride(2), k.stride(3),v.stride(0), v.stride(1), v.stride(2), v.stride(3),q.shape[0], q.shape[1], q.shape[2],ctx.grid[0],BLOCK_M=BLOCK, BLOCK_N=BLOCK,BLOCK_DMODEL=ctx.BLOCK_DMODEL, num_warps=8,num_stages=1,)# print(h.asm["ttgir"])return dq, dk, dv, None在前向传播中,通过调用 _fwd_kernel 函数实现自注意力机制的计算,主要包含矩阵乘法和 Softmax 操作。其输入为 q, k, v 以及一个标量 sm_scale,输出为自注意力机制的结果 o。
在后向传播中,通过调用 _bwd_kernel 函数计算 q, k, v 的梯度。
Triton在量化中的应用
前面的两个例子都来自官方的样例。那么,在真实的大模型中,是否真的使用到了Triton呢。
答案是有的,在量化库bitsandbytes中就用到了Triton,我们看一个量化的片段:
@triton.jitdef _quantize_global(x_ptr,absmax_inv_ptr,output_ptr,n_elements,BLOCK_SIZE: tl.constexpr,):pid = tl.program_id(axis=0)block_start = pid * BLOCK_SIZEoffsets = block_start + tl.arange(0, BLOCK_SIZE)mask = offsets < n_elementsx = tl.load(x_ptr + offsets, mask=mask)absmax_inv = tl.load(absmax_inv_ptr)output = tl.libdevice.llrint(127. * (x * absmax_inv))tl.store(output_ptr + offsets, output, mask=mask)
这段代码是用Triton语言编写的,用于实现全局量化的内核函数。它的功能是根据输入的浮点数数组x_ptr、最大绝对值的倒数absmax_inv_ptr和输出的整数数组output_ptr,将x_ptr中的每个元素乘以absmax_inv_ptr,然后四舍五入到最近的整数,并乘以127,得到量化后的结果。它使用了以下的Triton特性:
这里面新出现的是tl.libdevice.llrint函数,用于对一个浮点数进行四舍五入到最近的整数。
这段代码的逻辑是这样的:
- 首先,根据当前程序的索引和块大小(即每个程序处理的元素数),计算出输入和输出数组中要处理的元素的偏移量和掩码。掩码用于过滤掉超出数组长度的偏移量。
- 然后,从输入指针中加载要处理的元素x和最大绝对值的倒数absmax_inv到寄存器中。
- 接着,计算输出元素output,即将x乘以absmax_inv,然后四舍五入到最近的整数,并乘以127。
- 最后,将输出元素output从寄存器中存储到输出指针中。
这样,每个程序都可以并行地处理输入和输出数组的一部分,并将结果写入输出数组中。这种方式可以提高内存访问和计算的效率和并行度。
然后再来一个计算线程网格的函数:
def quantize_global(x: torch.Tensor):absmax = x.abs().max().unsqueeze(0)absmax_inv = 1./ absmaxoutput = torch.empty(*x.shape, device='cuda', dtype=torch.int8)assert x.is_cuda and output.is_cudan_elements = output.numel()grid = lambda meta: (triton.cdiv(n_elements, meta['BLOCK_SIZE']),)_quantize_global[grid](x, absmax_inv, output, n_elements)return output,
小结
Triton也是Openai的产品,虽然还在演进之中,但是可以做为优化的一个选项。


![[dp]HDOJ4960 Another OCD Patient](https://images.cnblogs.com/OutliningIndicators/ExpandedBlockStart.gif)