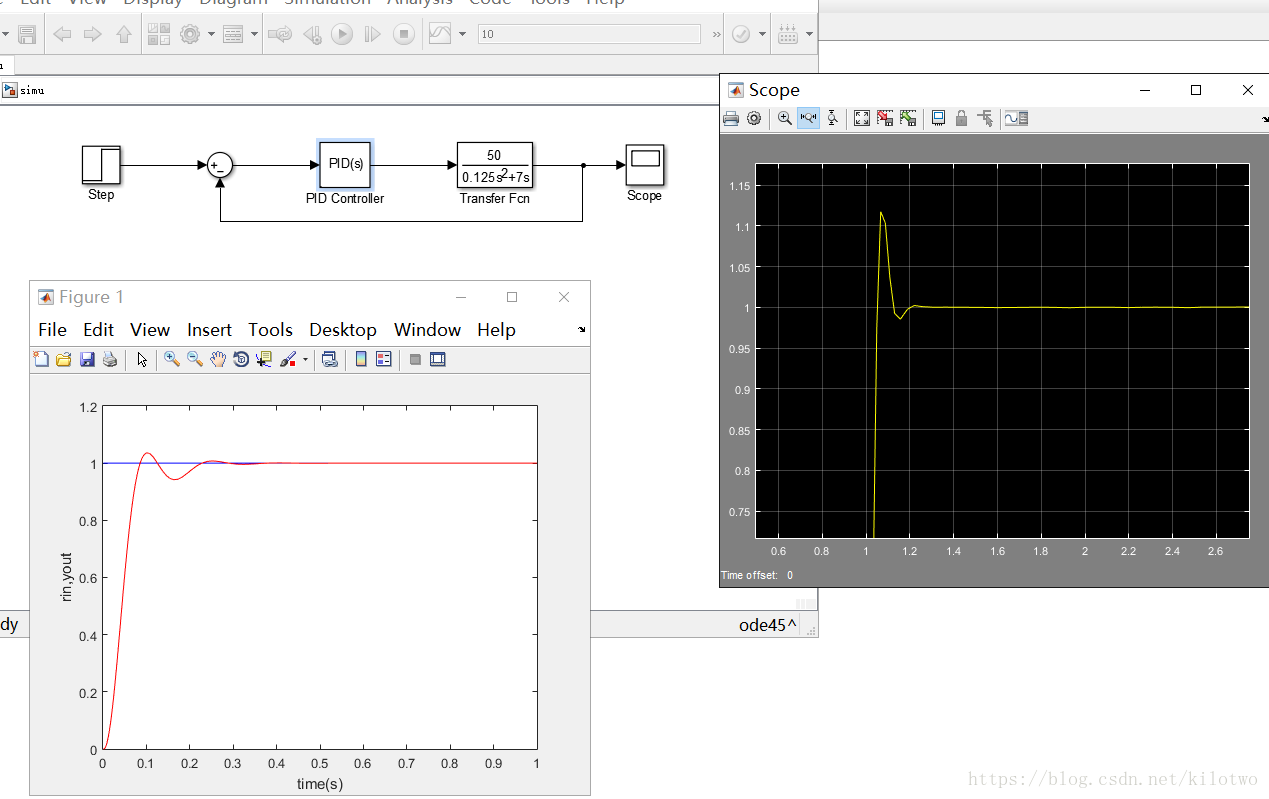
什么是PID调节器,并举例说明P、I、D的调节作用。
PID调节器是一个在工业控制应用中常见的反馈回路部件,PID是以它的三种纠正算法而命名的。这三种算法都是用加法调整被控制的数值。而实际上这些加法运算大部分变成了减法运算因为被加数总是负值。
以下是PID的调节作用举例:1.比例-来控制当前,误差值和一个负常数P(表示比例)相乘,然后和预定的值相加。P只是在控制器的输出和系统的误差成比例的时候成立。
这种控制器输出的变化与输入控制器的偏差成比例关系。比如说,一个电热器的控制器的比例尺范围是10°C,它的预定值是20°C。
那么它在10°C的时候会输出100%,在15°C的时候会输出50%,在19°C的时候输出10%,注意在误差是0的时候,控制器的输出也是0。
2.积分-来控制过去,误差值是过去一段时间的误差和,然后乘以一个负常数I,然后和预定值相加。I从过去的平均误差值来找到系统的输出结果和预定值的平均误差。
一个简单的比例系统会振荡,会在预定值的附近来回变化,因为系统无法消除多余的纠正。通过加上一个负的平均误差比例值,平均的系统误差值就会总是减少。所以,最终这个PID回路系统会在预定值定下来。
3.微分 -来控制将来,计算误差的一阶导,并和一个负常数D相乘,最后和预定值相加。这个导数的控制会对系统的改变作出反应。导数的结果越大,那么控制系统就对输出结果作出更快速的反应。
这个D参数也是PID被称为可预测的控制器的原因。D参数对减少控制器短期的改变很有帮助。一些实际中的速度缓慢的系统可以不需要D参数。
扩展资料:用更专业的话来讲,一个PID控制器可以被称作一个在频域系统的滤波器。这一点在计算它是否会最终达到稳定结果时很有用。
如果数值挑选不当,控制系统的输入值会反复振荡,这导致系统可能永远无法达到预设值。
谷歌人工智能写作项目:小发猫

BP神经网络原理
人工神经网络有很多模型,但是日前应用最广、基本思想最直观、最容易被理解的是多层前馈神经网络及误差逆传播学习算法(ErrorBack-Prooaeation),简称为BP网络深度学习和神经网络是不是同一个。
在1986年以Rumelhart和McCelland为首的科学家出版的《ParallelDistributedProcessing》一书中,完整地提出了误差逆传播学习算法,并被广泛接受。
多层感知网络是一种具有三层或三层以上的阶层型神经网络。
典型的多层感知网络是三层、前馈的阶层网络(图4.1),即:输入层、隐含层(也称中间层)、输出层,具体如下:图4.1三层BP网络结构(1)输入层输入层是网络与外部交互的接口。
一般输入层只是输入矢量的存储层,它并不对输入矢量作任何加工和处理。输入层的神经元数目可以根据需要求解的问题和数据表示的方式来确定。
一般而言,如果输入矢量为图像,则输入层的神经元数目可以为图像的像素数,也可以是经过处理后的图像特征数。
(2)隐含层1989年,RobertHechtNielsno证明了对于任何在闭区间内的一个连续函数都可以用一个隐层的BP网络来逼近,因而一个三层的BP网络可以完成任意的n维到m维的映射。
增加隐含层数虽然可以更进一步的降低误差、提高精度,但是也使网络复杂化,从而增加了网络权值的训练时间。
误差精度的提高也可以通过增加隐含层中的神经元数目来实现,其训练效果也比增加隐含层数更容易观察和调整,所以一般情况应优先考虑增加隐含层的神经元个数,再根据具体情况选择合适的隐含层数。
(3)输出层输出层输出网络训练的结果矢量,输出矢量的维数应根据具体的应用要求来设计,在设计时,应尽可能减少系统的规模,使系统的复杂性减少。
如果网络用作识别器,则识别的类别神经元接近1,而其它神经元输出接近0。
以上三层网络的相邻层之间的各神经元实现全连接,即下一层的每一个神经元与上一层的每个神经元都实现全连接,而且每层各神经元之间无连接,连接强度构成网络的权值矩阵W。
BP网络是以一种有教师示教的方式进行学习的。首先由教师对每一种输入模式设定一个期望输出值。然后对网络输入实际的学习记忆模式,并由输入层经中间层向输出层传播(称为“模式顺传播”)。
实际输出与期望输出的差即是误差。按照误差平方最小这一规则,由输出层往中间层逐层修正连接权值,此过程称为“误差逆传播”(陈正昌,2005)。
所以误差逆传播神经网络也简称BP(BackPropagation)网。随着“模式顺传播”和“误差逆传播”过程的交替反复进行。
网络的实际输出逐渐向各自所对应的期望输出逼近,网络对输入模式的响应的正确率也不断上升。通过此学习过程,确定下各层间的连接权值后。
典型三层BP神经网络学习及程序运行过程如下(标志渊,2006):(1)首先,对各符号的形式及意义进行说明:网络输入向量Pk=(a1,a2,...,an);网络目标向量Tk=(y1,y2,...,yn);中间层单元输入向量Sk=(s1,s2,...,sp),输出向量Bk=(b1,b2,...,bp);输出层单元输入向量Lk=(l1,l2,...,lq),输出向量Ck=(c1,c2,...,cq);输入层至中间层的连接权wij,i=1,2,...,n,j=1,2,...p;中间层至输出层的连接权vjt,j=1,2,...,p,t=1,2,...,p;中间层各单元的输出阈值θj,j=1,2,...,p;输出层各单元的输出阈值γj,j=1,2,...,p;参数k=1,2,...,m。
(2)初始化。给每个连接权值wij、vjt、阈值θj与γj赋予区间(-1,1)内的随机值。(3)随机选取一组输入和目标样本提供给网络。
(4)用输入样本、连接权wij和阈值θj计算中间层各单元的输入sj,然后用sj通过传递函数计算中间层各单元的输出bj。
基坑降水工程的环境效应与评价方法bj=f(sj)j=1,2,...,p(4.5)(5)利用中间层的输出bj、连接权vjt和阈值γt计算输出层各单元的输出Lt,然后通过传递函数计算输出层各单元的响应Ct。
基坑降水工程的环境效应与评价方法Ct=f(Lt)t=1,2,...,q(4.7)(6)利用网络目标向量,网络的实际输出Ct,计算输出层的各单元一般化误差。
基坑降水工程的环境效应与评价方法(7)利用连接权vjt、输出层的一般化误差dt和中间层的输出bj计算中间层各单元的一般化误差。
基坑降水工程的环境效应与评价方法(8)利用输出层各单元的一般化误差与中间层各单元的输出bj来修正连接权vjt和阈值γt。
基坑降水工程的环境效应与评价方法(9)利用中间层各单元的一般化误差,输入层各单元的输入Pk=(a1,a2,...,an)来修正连接权wij和阈值θj。
基坑降水工程的环境效应与评价方法(10)随机选取下一个学习样本向量提供给网络,返回到步骤(3),直到m个训练样本训练完毕。
(11)重新从m个学习样本中随机选取一组输入和目标样本,返回步骤(3),直到网路全局误差E小于预先设定的一个极小值,即网络收敛。如果学习次数大于预先设定的值,网络就无法收敛。(12)学习结束。
可以看出,在以上学习步骤中,(8)、(9)步为网络误差的“逆传播过程”,(10)、(11)步则用于完成训练和收敛过程。通常,经过训练的网络还应该进行性能测试。
测试的方法就是选择测试样本向量,将其提供给网络,检验网络对其分类的正确性。测试样本向量中应该包含今后网络应用过程中可能遇到的主要典型模式(宋大奇,2006)。
这些样本可以直接测取得到,也可以通过仿真得到,在样本数据较少或者较难得到时,也可以通过对学习样本加上适当的噪声或按照一定规则插值得到。
为了更好地验证网络的泛化能力,一个良好的测试样本集中不应该包含和学习样本完全相同的模式(董军,2007)。
BP神经网络的工作原理
人工神经网络就是模拟人思维的第二种方式。这是一个非线性动力学系统,其特色在于信息的分布式存储和并行协同处理。
虽然单个神经元的结构极其简单,功能有限,但大量神经元构成的网络系统所能实现的行为却是极其丰富多彩的。人工神经网络首先要以一定的学习准则进行学习,然后才能工作。
现以人工神经网络对手写“A”、“B”两个字母的识别为例进行说明,规定当“A”输入网络时,应该输出“1”,而当输入为“B”时,输出为“0”。
所以网络学习的准则应该是:如果网络作出错误的的判决,则通过网络的学习,应使得网络减少下次犯同样错误的可能性。
首先,给网络的各连接权值赋予(0,1)区间内的随机值,将“A”所对应的图象模式输入给网络,网络将输入模式加权求和、与门限比较、再进行非线性运算,得到网络的输出。
在此情况下,网络输出为“1”和“0”的概率各为50%,也就是说是完全随机的。这时如果输出为“1”(结果正确),则使连接权值增大,以便使网络再次遇到“A”模式输入时,仍然能作出正确的判断。
如果输出为“0”(即结果错误),则把网络连接权值朝着减小综合输入加权值的方向调整,其目的在于使网络下次再遇到“A”模式输入时,减小犯同样错误的可能性。
如此操作调整,当给网络轮番输入若干个手写字母“A”、“B”后,经过网络按以上学习方法进行若干次学习后,网络判断的正确率将大大提高。
这说明网络对这两个模式的学习已经获得了成功,它已将这两个模式分布地记忆在网络的各个连接权值上。当网络再次遇到其中任何一个模式时,能够作出迅速、准确的判断和识别。
一般说来,网络中所含的神经元个数越多,则它能记忆、识别的模式也就越多。如图所示拓扑结构的单隐层前馈网络,一般称为三层前馈网或三层感知器,即:输入层、中间层(也称隐层)和输出层。
它的特点是:各层神经元仅与相邻层神经元之间相互全连接,同层内神经元之间无连接,各层神经元之间无反馈连接,构成具有层次结构的前馈型神经网络系统。
单计算层前馈神经网络只能求解线性可分问题,能够求解非线性问题的网络必须是具有隐层的多层神经网络。
基于BP神经网络的PID,输入参数的归一化,问题求助?
利用BP神经网络来整定PID,也许能实现。但是书本上的这个BP-PID理论书本是错误的。你仔细看看,它的输出激活函数的值域是【0,1】,PID的参数不可能是只在这个范围啊!
可以说输出没有反归一化(值域扩展)。至于输入归一化,可用不做,但是输出在0和1之间,就是闹笑话了。
神经网络自整定PID真的有效吗?我看图书馆的参考书上和知网论文上的方法,感觉推导过程都不对啊?
楼主的这个问题已经是六年前的问题了(今天2021年5月),不知道楼主现在还关注这个话题不?神经网络自整定PID肯定是有效的。
目前,神经网络自整定PID主要面临三个问题:一是初值选择的问题,不合理的初值很容易使闭环系统不稳定;二是神经网络自整定PID自身需要人为设定的参数较多,PID控制自身只需要三个人为设定参数,神经网络自整定PID则需要四个(三个初值和一个学习因子),这使得神经网络自整定PID比传统PID算法还要麻烦;三是缺乏完整的理论稳定性证明,神经网络自整定PID在线更新规则早已稳定,并且被广泛引用和应用,而基于神经网络自整定PID的闭环系统稳定性证明一直没有得到很好的解决,某种程度上,这限制了神经网络自整定PID的推广。
我个人也做了一些这样的研究,感兴趣的话可以参考我的一篇期刊论文。
Data-DrivenTrackingControlBasedonLMandPIDNeuralNetworkwithRelayFeedbackforDiscreteNonlinearSystems。