参考:
https://blog.csdn.net/Lynn_mg/article/details/103149489
https://blog.csdn.net/weixin_40650126/article/details/112573036
目录
- 安装环境:
- 安装RealSense SDK
- 1. 下载source
- 2. 安装依赖项
- 3. 安装权限脚本
- 4. 编译安装
- 5. 测试
- 安装RealSense-Ros
- 1. 创建ros工作空间
- 2. clone代码到工作空间
- 3. 编译运行
- 4. 环境路径配置
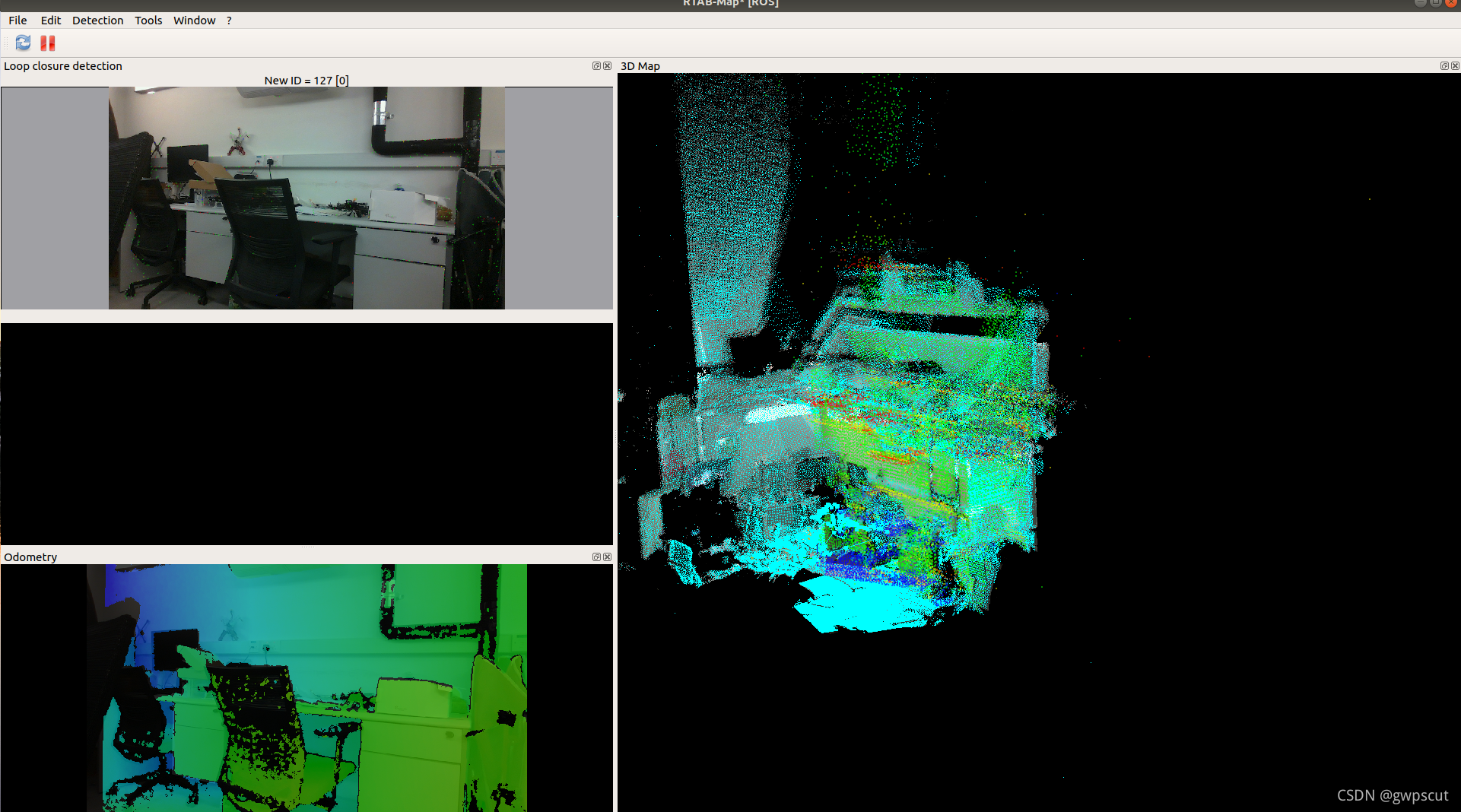
- 5. 使用rviz可视化
安装环境:
系统:Ubuntu 18.04
ROS:Melodic
深度相机:Intel RealSense L515
安装RealSense SDK
github: https://github.com/IntelRealSense/librealsense
提示:ubuntu访问github慢 解决方法参考以下链接
https://blog.csdn.net/qq_37778018/article/details/120624252
1. 下载source
git clone https://github.com/IntelRealSense/librealsense
cd librealsense
2. 安装依赖项
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
3. 安装权限脚本
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
4. 编译安装
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install
5. 测试
注意L515接入USB3.0端口
进入librealsense/build/examples/capture,测试效果:
./rs-capture
或直接使用realsense-viewer工具查看效果:
realsense-viewer
安装RealSense-Ros
1. 创建ros工作空间
mkdir -p ~/catkin_ws/src
2. clone代码到工作空间
cd ~/catkin_ws/src/
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
3. 编译运行
一定要确保依赖包都安装了,不然后面catkin_make会失败
cd ..
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
4. 环境路径配置
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
5. 使用rviz可视化
注意L515接入USB3.0端口
新打开一个终端2,通过ros节点启动
roslaunch realsense2_camera rs_camera.launch
新打开一个终端3,运行rviz,实现点云可视化
rviz
可根据应用需求修改launch文件;
rostopic list 指令查看当前所有的主题,启动前启动后对比,得出输出topic;
rosbag record 指令录制指定topic的bag包,实现点云数据保存。