最近实验室购买了Intel Realsense l515相机。本博文记录使用过程~

驱动安装
先到官网安装驱动:https://github.com/IntelRealSense/realsense-ros![]() https://github.com/IntelRealSense/realsense-ros安装realsense2_camera
https://github.com/IntelRealSense/realsense-ros安装realsense2_camera
sudo apt-get install ros-melodic-realsense2-camera然后运行下面命令启动相机
roslaunch realsense2_camera rs_camera.launch
看看所能出来的topic信息
/camera/color/camera_info
/camera/color/image_raw
/camera/color/image_raw/compressed
/camera/color/image_raw/compressed/parameter_descriptions
/camera/color/image_raw/compressed/parameter_updates
/camera/color/image_raw/compressedDepth
/camera/color/image_raw/compressedDepth/parameter_descriptions
/camera/color/image_raw/compressedDepth/parameter_updates
/camera/color/image_raw/theora
/camera/color/image_raw/theora/parameter_descriptions
/camera/color/image_raw/theora/parameter_updates
/camera/depth/camera_info
/camera/depth/image_rect_raw
/camera/depth/image_rect_raw/compressed
/camera/depth/image_rect_raw/compressed/parameter_descriptions
/camera/depth/image_rect_raw/compressed/parameter_updates
/camera/depth/image_rect_raw/compressedDepth
/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth/image_rect_raw/compressedDepth/parameter_updates
/camera/depth/image_rect_raw/theora
/camera/depth/image_rect_raw/theora/parameter_descriptions
/camera/depth/image_rect_raw/theora/parameter_updates
/camera/extrinsics/depth_to_color
/camera/l500_depth_sensor/parameter_descriptions
/camera/l500_depth_sensor/parameter_updates
/camera/motion_module/parameter_descriptions
/camera/motion_module/parameter_updates
/camera/realsense2_camera_manager/bond
/camera/rgb_camera/parameter_descriptions
/camera/rgb_camera/parameter_updates
/diagnostics
/rosout
/rosout_agg
/tf
/tf_static
若要显示点云,可运行
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
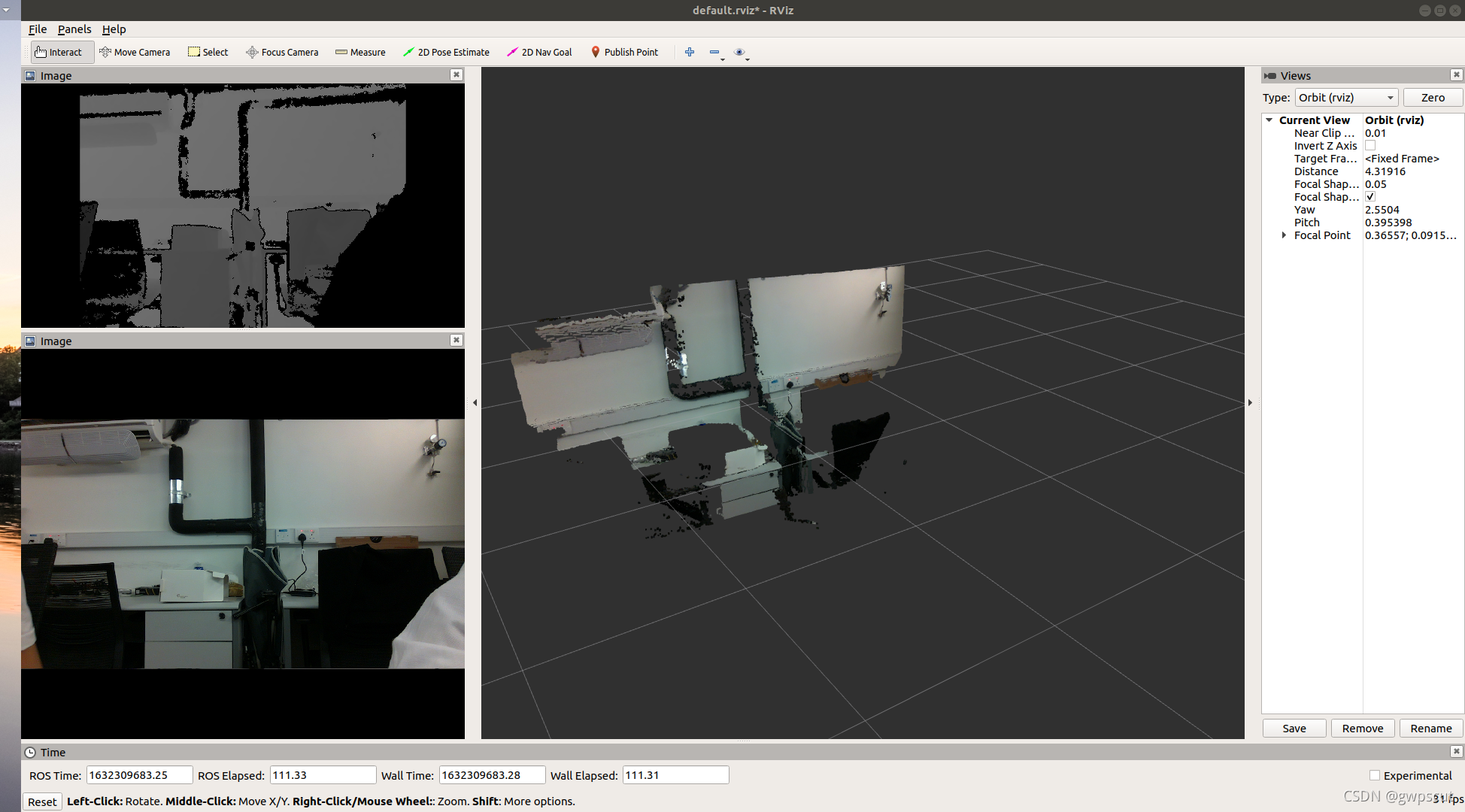
通过rviz来可视化(主要要显示点云信息需要将frame改为camera link)
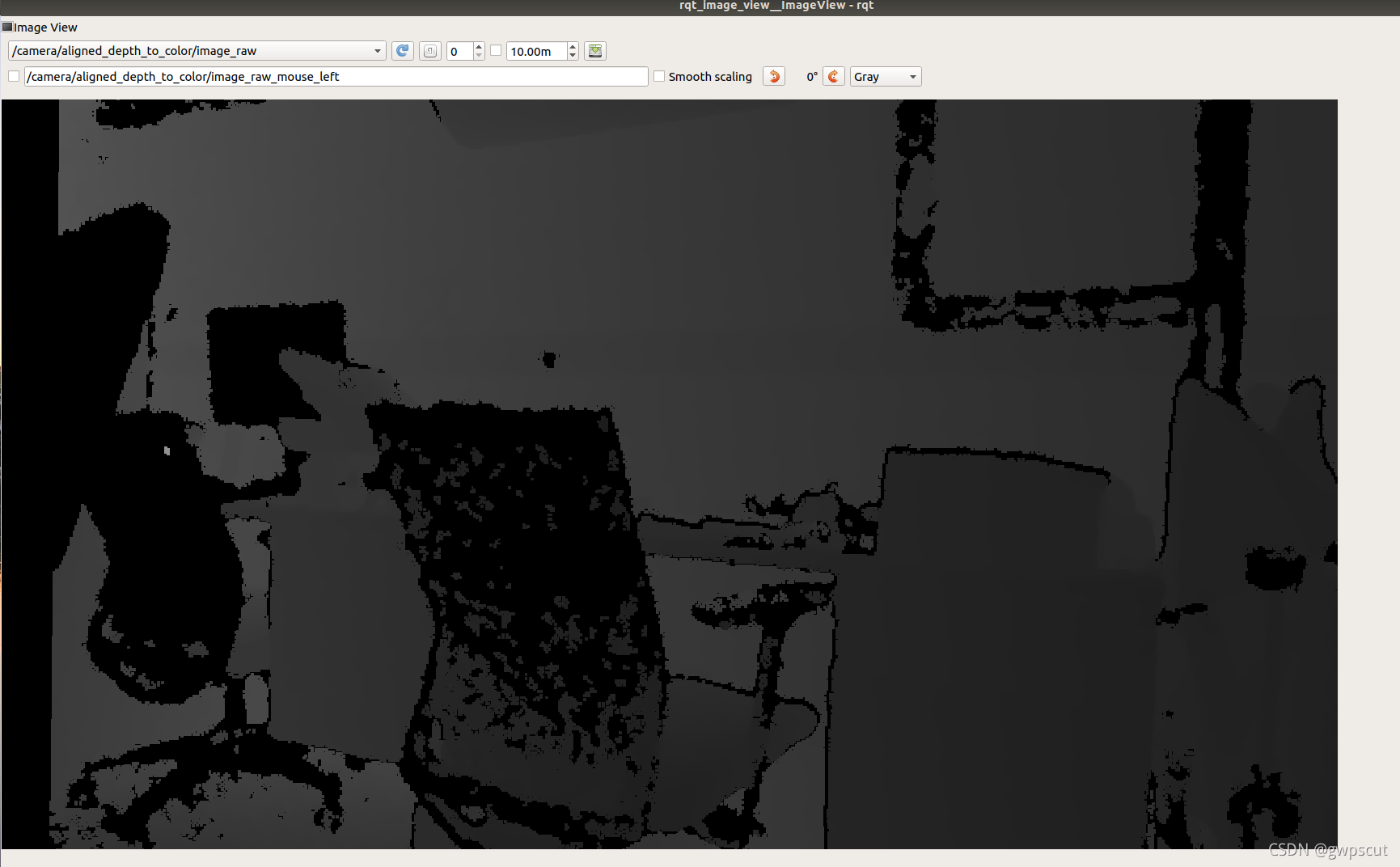
运行下面节点来将深度信息与图像align
roslaunch realsense2_camera rs_camera.launch align_depth:=true
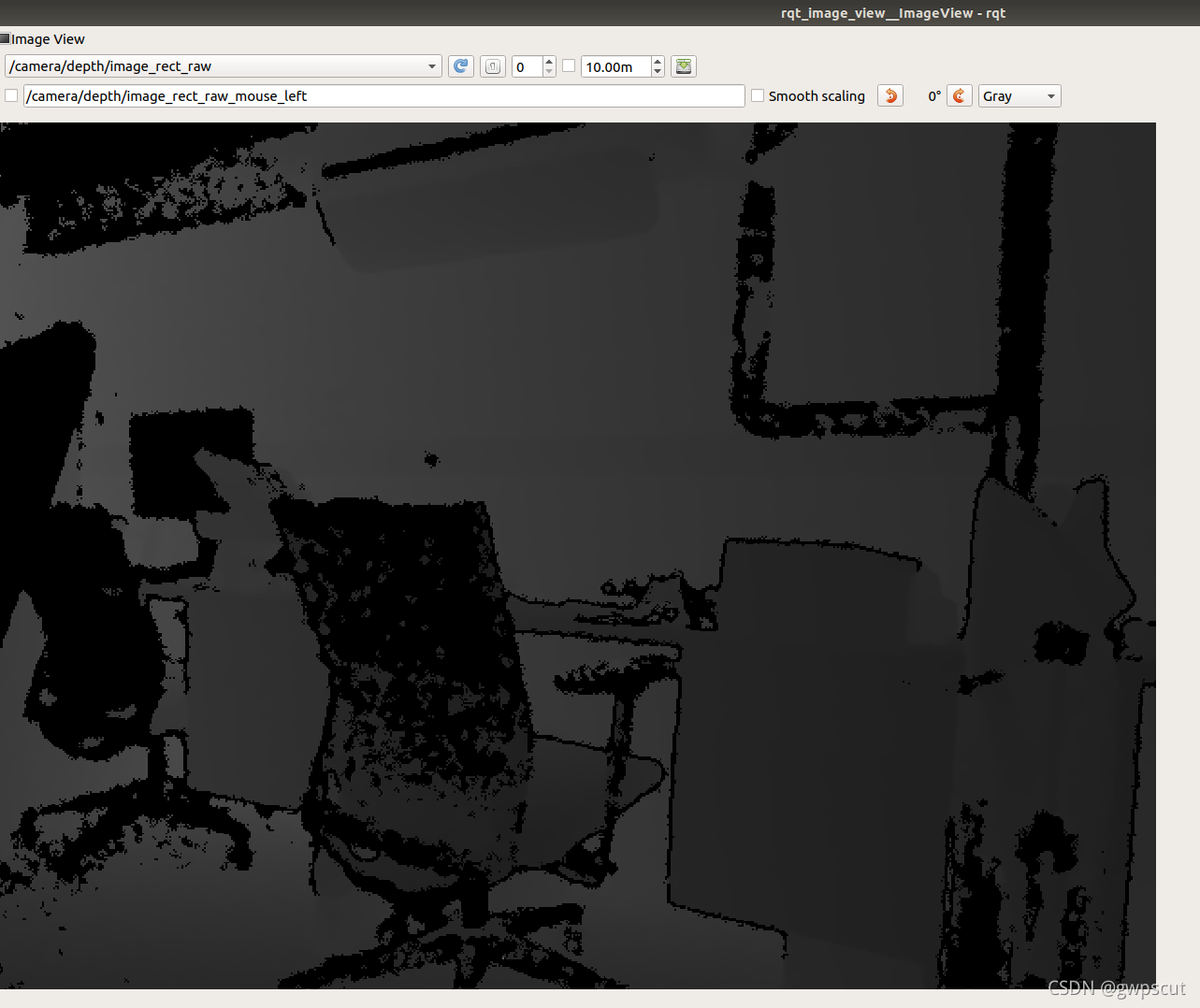
也可以通过image view来显示
rosrun rqt_image_view rqt_image_view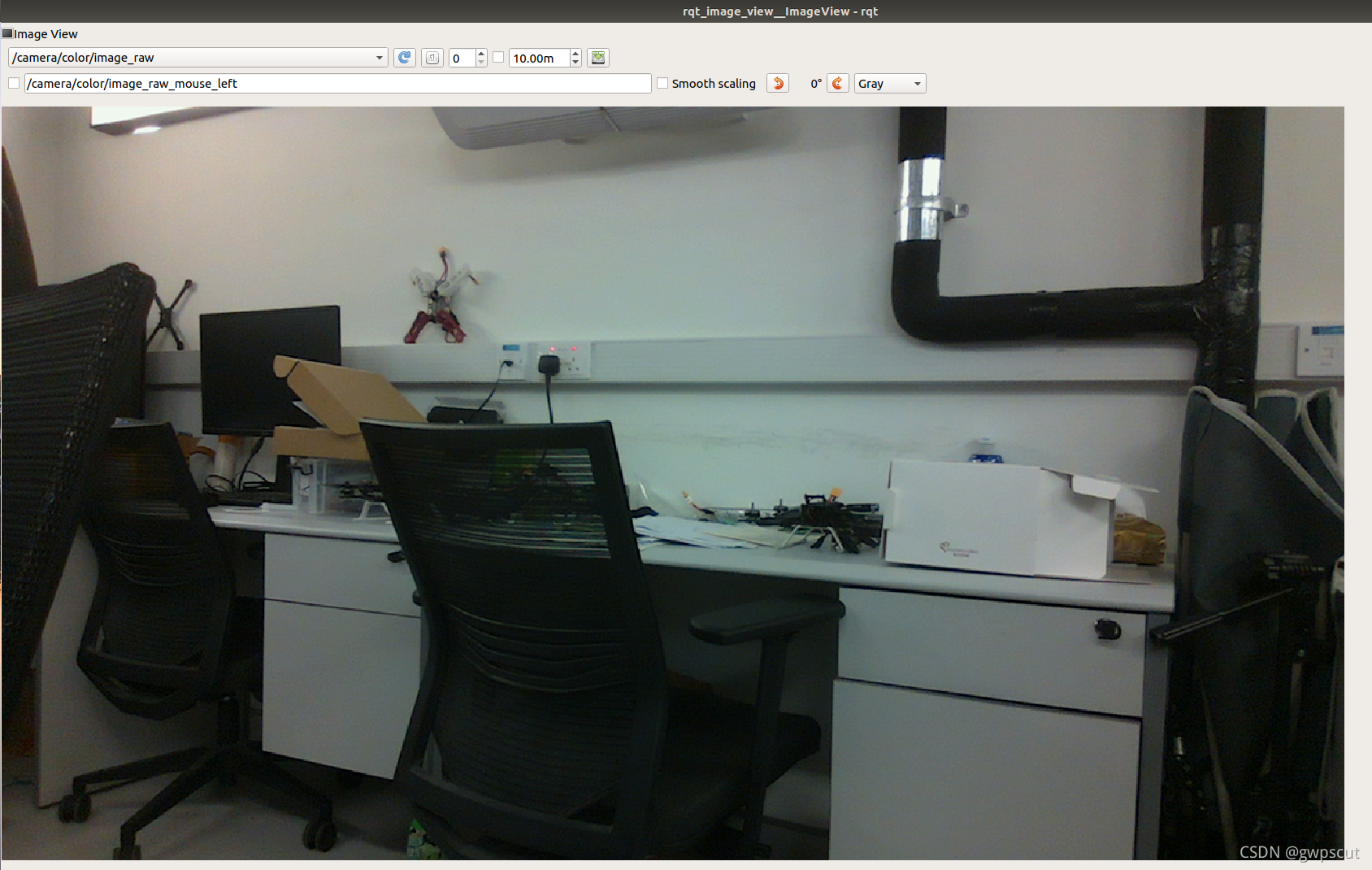
SLAM测试
之前博客《ROS实验笔记之——XBOX Kinect2 的使用及基于RTAB-MAP的建图》介绍过基于Kinect2的SLAM建图,这里试试用l515的效果~
安装rtabmap
sudo apt-get install ros-melodic-rtabmap-rosrosrun rtabmap_ros pointcloud_to_depthimage cloud:=/camera/depth/color/points camera_info:=/camera/color/camera_info image_raw:=/camera/depth/image_rect_raw image:=/camera/color/image_raw _approx:=false _fill_holes_size:=2roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/depth/image_rect_raw无法使用。。topic完全不一样。。。
点进去,发现有rtabmap的launch文件
roslaunch realsense2_camera rs_rtabmap.launch改为下面的试试
roslaunch realsense2_camera rs_rgbd.launch
然后通过改topic名字来实现rtabmap,发现还是不可以。。。。
# ISSUE: Use unite_imu_method:="copy" if imu topics keep stopping
$ roslaunch realsense2_camera rs_camera.launch \align_depth:=true \unite_imu_method:="linear_interpolation" \enable_gyro:=true \enable_accel:=true$ rosrun imu_filter_madgwick imu_filter_node \_use_mag:=false \_publish_tf:=false \_world_frame:="enu" \/imu/data_raw:=/camera/imu \/imu/data:=/rtabmap/imu
安装
sudo apt-get install ros-melodic-imu-tools即可~使用imu(imu_filter_madgwick - ROS Wiki)
GitHub - ccny-ros-pkg/imu_tools: ROS tools for IMU devices
然后运行
$ rosrun nodelet nodelet standalone rtabmap_ros/point_cloud_xyz \_approx_sync:=false \/depth/image:=/camera/depth/image_rect_raw \/depth/camera_info:=/camera/depth/camera_info \_decimation:=4$ roslaunch rtabmap_ros rtabmap.launch\rtabmap_args:="\--delete_db_on_start \--Icp/VoxelSize 0.05 \--Icp/PointToPlaneRadius 0 \--Icp/PointToPlaneK 20 \--Icp/CorrespondenceRatio 0.2 \--Icp/PMOutlierRatio 0.65 \--Icp/Epsilon 0.005 \--Icp/PointToPlaneMinComplexity 0 \--Odom/ScanKeyFrameThr 0.7 \--OdomF2M/ScanMaxSize 15000 \--Optimizer/GravitySigma 0.3 \--RGBD/ProximityPathMaxNeighbors 1 \--Reg/Strategy 1" \icp_odometry:=true \scan_cloud_topic:=/cloud \subscribe_scan_cloud:=true \depth_topic:=/camera/aligned_depth_to_color/image_raw \rgb_topic:=/camera/color/image_raw \camera_info_topic:=/camera/color/camera_info \approx_sync:=false \wait_imu_to_init:=true \imu_topic:=/rtabmap/imu
成功!感觉本质上就是学会怎么改好topic就行了,理解清楚每个topic的意义
使用如下服务可以用于从一个干净的数据库开始建图
rosservice call /rtabmap/reset
如果地图的背景变成红色,那是因为里程表丢失了。访问丢失的里程表(红色屏幕!)部分,了解为什么会发生这种情况!为了再次跟踪里程表,更换相机到红色出现前的最后一个位置,它应该能够重新计算里程表。另一种方法是重置里程表使用菜单选项““Edit->Reset odometry””(注意,一个新的地图创建每次里程表重置)。参见里程表自动复位另一种方法来处理里程表丢失(重置和继续相同的地图)。
若要加上定位,则运行
roslaunch rtabmap_ros rtabmap.launch\rtabmap_args:="\--delete_db_on_start \--Icp/VoxelSize 0.05 \--Icp/PointToPlaneRadius 0 \--Icp/PointToPlaneK 20 \--Icp/CorrespondenceRatio 0.2 \--Icp/PMOutlierRatio 0.65 \--Icp/Epsilon 0.005 \--Icp/PointToPlaneMinComplexity 0 \--Odom/ScanKeyFrameThr 0.7 \--OdomF2M/ScanMaxSize 15000 \--Optimizer/GravitySigma 0.3 \--RGBD/ProximityPathMaxNeighbors 1 \--Reg/Strategy 1" \icp_odometry:=true \scan_cloud_topic:=/cloud \subscribe_scan_cloud:=true \depth_topic:=/camera/aligned_depth_to_color/image_raw \rgb_topic:=/camera/color/image_raw \camera_info_topic:=/camera/color/camera_info \approx_sync:=false \wait_imu_to_init:=true \imu_topic:=/rtabmap/imu \localization:=true
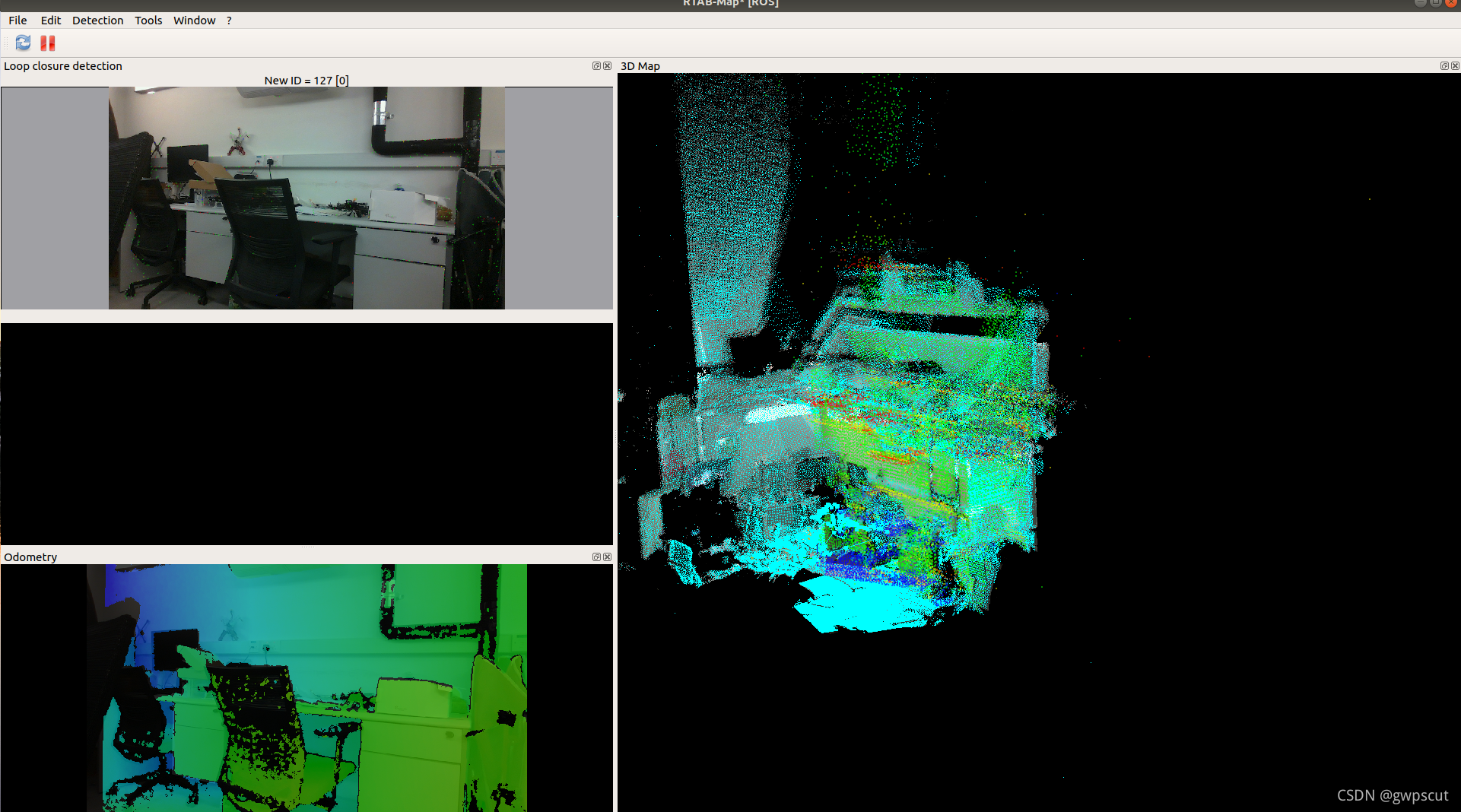
基于intel realsense l515激光相机的rtabmap
用kinect效果
roslaunch kinect2_bridge kinect2_bridge.launch
roslaunch kinect2_bridge kinect2_bridge_custom_rviz_hd.launch
roslaunch rtabmap_ros rgbd_mapping_kinect2.launchroslaunch kinect2_bridge kinect2_bridge.launch pulish_tf:=truerosrun tf static_transform_publisher 0 0 0 -1.5707963267948966 0 -1.5707963267948966 camera_link kinect2_link 100 roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/kinect2/qhd/image_color_rect depth_topic:=/kinect2/qhd/image_depth_rect camera_info_topic:=/kinect2/qhd/camera_info rtabmap
rtabmap
参考资料
GitHub - IntelRealSense/realsense-ros: Intel(R) RealSense(TM) ROS Wrapper for D400 series, SR300 Camera and T265 Tracking Module
Realsense L515初次使用记录_复古蓝的博客-CSDN博客
运行Intel realsense L515相机_cyx610481953的博客-CSDN博客librealsense/distribution_linux.md at master · IntelRealSense/librealsense · GitHub运行Intel realsense L515相机_cyx610481953的博客-CSDN博客
rtabmap RGB-D相机手持建图_m0_46530321的博客-CSDN博客
http://wiki.ros.org/rtabmap_ros