机载LiDAR是近年来兴起的获取高精度地理信息数据的重要手段,具有成果精度高、数据生成快、植被穿透强等特点,日益受到作业单位的青睐。
2022年7月份,千寻位置数字网格合作伙伴携千巡翼Q30复合翼无人机、QX-1845R机载LiDAR赴山东泰安某流域进行高精度地形数据获取,仅飞行一架次约46分钟便获取了6km²高精度点云和正射影像数据!
测区概况
项目地点位于山东省泰安市,地处平原,现场无高落差山峰及建筑物。测区为长度10公里的带状河流,河道最宽处近400米,两岸村庄房屋较多,植被茂密,测区范围见下图:

测区概况
成果要求
提交成果:真彩色点云、正射影像图
坐标系:CGCS2000,1985高程
精度要求:点云精度平面与高程中误差优于10cm;正射影像图平面中误差优于10cm
项目工期:2天
其他要求:点云地面点密度优于8pt/m²,正射影像图地面采样距离优于8cm。
设备选择
考虑到该项目时间紧,任务重,普通旋翼无人机挂载入门级激光雷达需要作业2~3天,同时由于穿透性差,难以满足点云地面点数要求。故选择千巡翼Q30挂载QX-1845R机载LiDAR“牛刀小试”,这套系统优势如下:

高精度:基于多传感器融合的组合导航系统设计,高度紧耦合集成Riegl VUX-1LR 1845m长测距轻型激光扫描仪、全画幅相机,精度更高;
强穿透:激光器无穷次回波,1845超长测程,轻松穿透两岸植被;
高效率:千巡翼Q30挂载1845RK机载LiDAR最长作业时间2小时16分钟,单架次理论最大作业面积不小于15km²;
免基站:支持无基准站功能,无需测量基准站,无需架设中继基站,操作方便简单,即可完成大面积与超长带状测区作业;
一站式后处理:一个中文软件内向导式完成轨迹解算、点云生成、赋色处理等工作,上手简单,使用友好;
真正射:通过高精度激光雷达点云数据,即使旁向重叠率30%也能完成正射纠正,生成TDOM真正射影像;
模块化:载荷舱采用模块化设计,可适配多种载荷,现场秒级自由切换载荷舱;
更安全:采用三余度安全飞控,多个传感器互相独立工作,互为备份稳定可靠
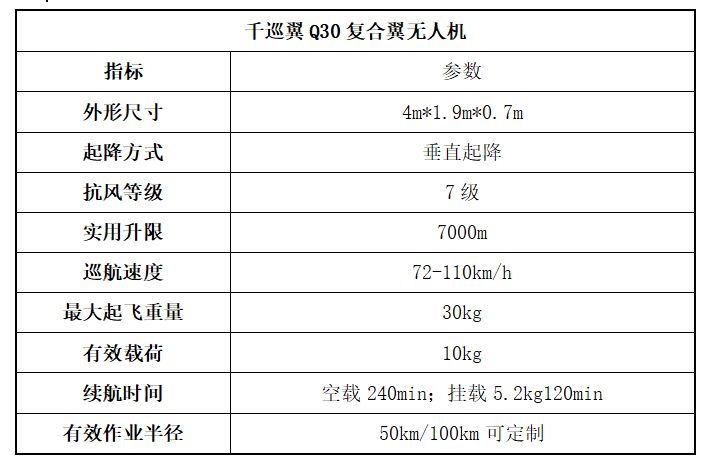
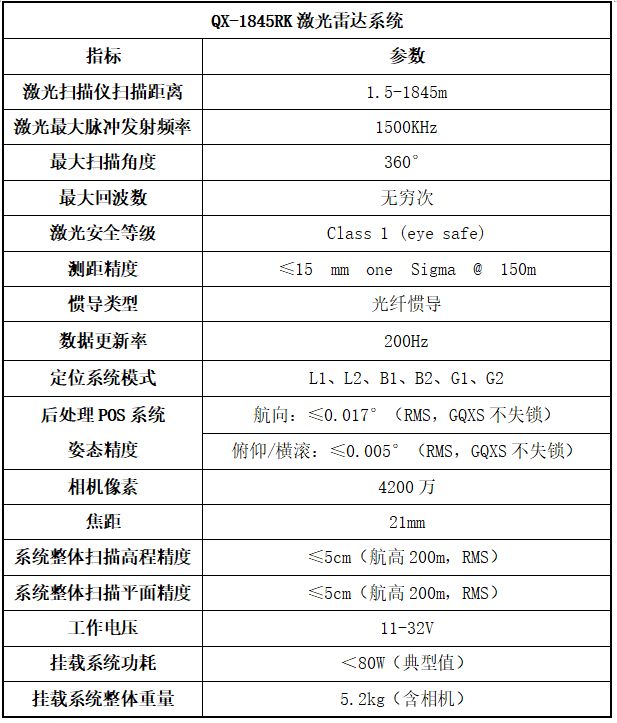
主要技术指标如下:
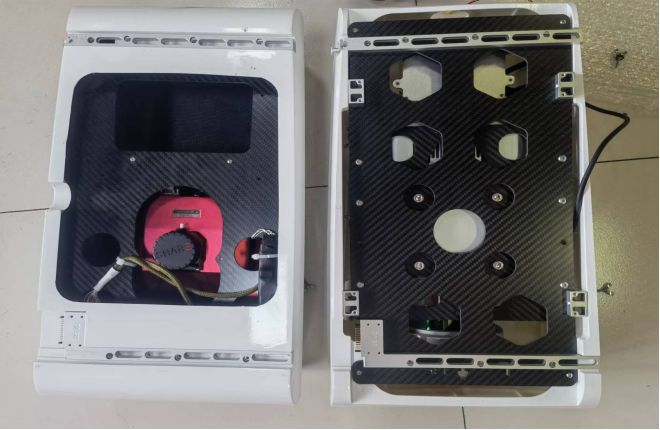
可搭载全画幅倾斜相机(左)可搭载长测程激光雷达(右)

SUV汽车可装下,运输方便


现场装备完成图
航摄参数设置
飞行相对航高240m,巡航速度20m/s,航带间距120m,按照带状航线作业,作业面积6.02km²。飞行一个起落,共计46分钟。

2D/3D航线分屏显示功能
航线安全自动检查

安全电子围栏
千巡翼Q30采用安全电子围栏模式,内置三冗余安全模块,保证固定翼在安全范围内飞行,并且随时跟踪飞机的地理信息位置,安全性更高。
数据处理
激光雷达点云生成采用QX-PCP软件。软件为全中文界面、向导式流程,一站式完成航迹解算、点云解算、点云处理等工作。
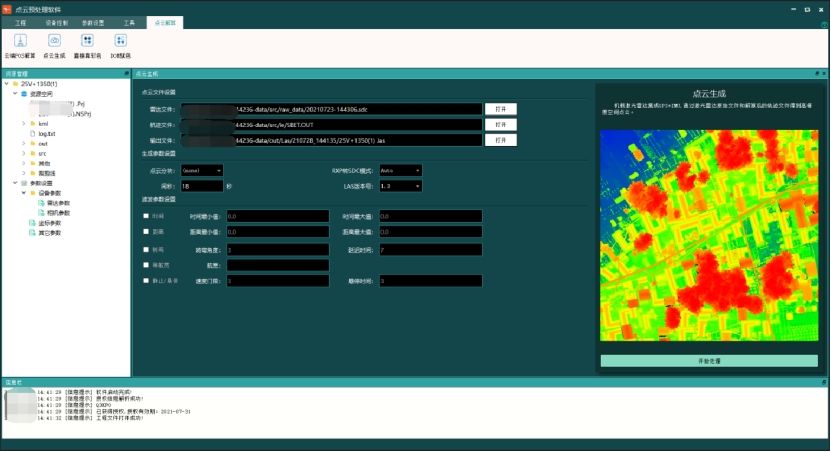
分钟级点云生成界面
数据成果
软件后处理部分具有点云编辑、渲染、去噪、分类、直接赋色等常用功能。去噪分类后点云如下所示。
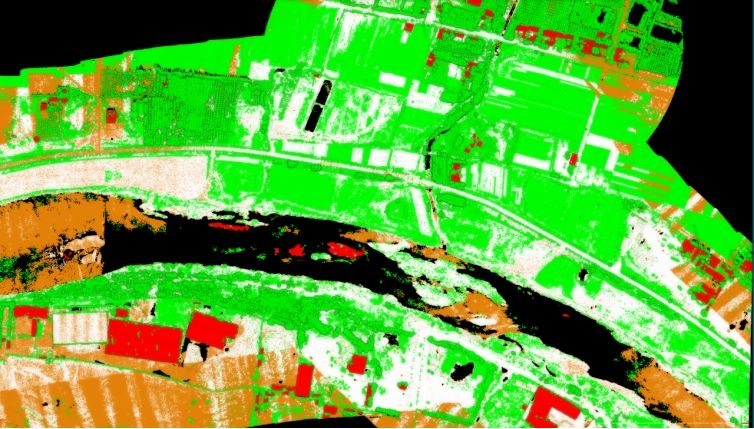
分类后点云

处理后真彩色点云
雷达自带全画幅相机,获取点云的同时,可以获取到正射影像,让外业效率翻倍。下图是正射影像局部,细节清楚、色彩一致、效果良好,满足数字化地图需求。

局部DOM
成果评价
QX1-1845RK激光雷达,以其较长的测程和较高点密度的特点,表现出非常优秀的穿透能力,河道两岸的各类植被、庄稼等悉数被穿透,点云分类滤波后可以直接得到地面高程。
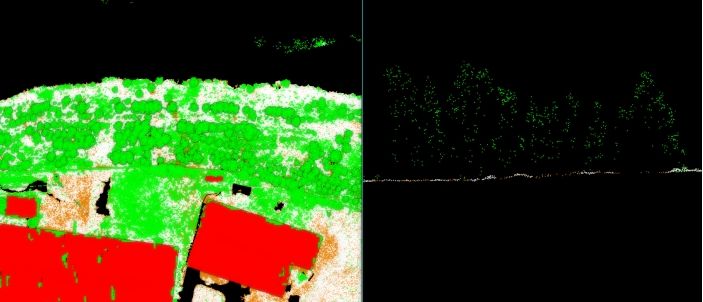
植被穿透性
 地面点平均点云密度为18个/米²
地面点平均点云密度为18个/米²
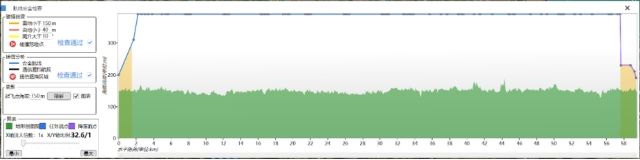
整套方案以强耦合的方式连接,运行稳定性较好,最终得到成果点云厚度较薄,小于5cm,同时对点云精度有较好的保证,可以轻松达到1:500要求,如下图所示。

点云厚度在8cm左右
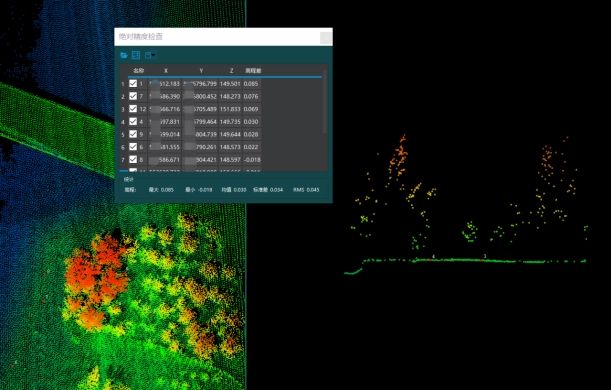
精度检查高程中误差为4.7cm
项目总结
(1) 本次作业数据成果完全满足项目要求,所获取的数据从点密度和高程中误差点云精度已达到1:500要求;
(2) 长带状地形区区域作业,依赖平台的带状飞行能力,单架次作业航程可达140公里,按照240米航高,120米航带宽,单架次作业面积可达15平方公里;
(3) 点云厚度在5cm左右,且点云比较均匀,真彩色赋色速度快无错位;
(4) 本次数据通过自研的点云后处理软件进行自动分类、手动精细分类提取地面点,制作DLG线划图;
搜索千寻位置,查看更多北斗产业相关资讯、产品及解决方案。