【写在前面】
网上资料梳理,侵删烦请联系。或有表达错误,欢迎指出纠正。
【参考引用】
[1]https://blog.csdn.net/u012596975/article/details/107137883
相机系统
- 1 相机系统
- 1.1 相机模组
- 1.1.1 镜头参数
- 1.1.2 对焦马达
- 1.1.3 滤光片
- 1.1.4 感光器
- 1.2 图像处理器(ISP)
- 1.2.1 IFE
- 1.2.2 BPS
- 1.2.3 IPE
- 1.2.4 JPEG
- 2 双摄技术
- 2.1 背景虚化(RGB+RGB)
- 2.2 暗光提升(RGB+MONO)
- 2.3 光学变焦(广角+长焦)
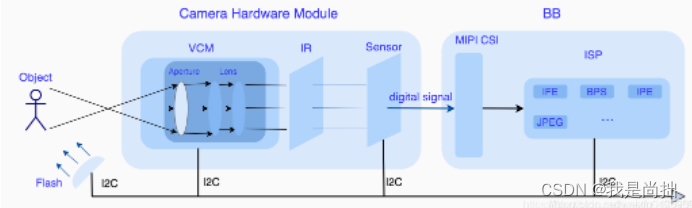
1 相机系统
1.1 相机模组
组成:镜头、对焦马达、滤光片、感光器(sensor)。
作用:光电转换。
1.1.1 镜头参数
- 视场角(Fov)
决定镜头可以成像多大范围的场景。
Fov越大,范围越大,但可能导致畸变,可通过畸变矫正算法修正。 - 焦距F
焦点:平行于透镜主轴的光线汇聚的点。
焦距:焦点至透镜中心的距离。
焦距越大,Fov越小。 - 光圈值f
镜头焦距F/实际光圈直径
f越小,进光量越大。
手机镜头一般采用f/2.0的固定光圈。
1.1.2 对焦马达
主要是音圈马达(VCM)。
为方便调整镜头,一般将镜头集成在马达模组中。
主板通过I2C传输指令,驱使马达移动,调整镜头。
原理:在永久磁场内部,通过改变马达内线圈的直流电流大小,控制弹簧片拉伸位置,带动镜头上下运动。
使用模式:
①变焦(光学变焦)。移动透镜,改变整个镜头的焦距,引起视场角变化,使景物放大缩小。不损失图像细节,受体积限制,无法进行大范围光学变焦。
②对焦。移动镜头使物体的像平面与感光器的感光平面重合。获得清晰的图像。
光线经过镜头,进入下一个组件—滤光片。
1.1.3 滤光片
功能:
①过滤红外线
仅让可见光透过。
②修正光线
保留直射光线,反射掉通过透镜的许多非平行直射的光线。
经过过滤修正,入射的光线具有稳定性,可以通过感光器进行光电转换。
1.1.4 感光器
主要包括CCD与CMOS两类。CMOS成本低,为主流。
CMOS采用三层结构:微透镜+滤光片+感光层
①微透镜
扩展单个像素的受光面积;
②滤光片
RGB模式:采用RGB颜色分量分别度量每一个像素的三通道灰度值;
Bayer模式:与RGB类似,进一步强调绿色分量,将G定义为Gr、Gb。
③感光层(光>模电>数电)
将光子转换成电子信号,经过放大电路及模电转换电路,将其转换成数字信号。
核心是二极管。每个二极管上都包含了一个放大器和一个数模转换电路。
1.2 图像处理器(ISP)
硬件模块:IFE、BPS、IPE、JPEG
1.2.1 IFE
Image Front End,图像前端。
sensor输出数据首先到达IFE,对preview及video做一些颜色校正、下采样、去马赛克统计3A数据的处理。
1.2.2 BPS
Bayer processing segment,拜尔处理。
用于拍照图像数据的坏点去除、相位对焦、去马赛克、下采样、HDR处理以及Bayer的混合降噪处理。
1.2.3 IPE
Image processing engine,图像处理引擎。
由NPS、PPS两部分组成。
用于硬件降噪(MFNR、MFSR)、图像的裁剪、降噪、颜色处理、细节增强等图像处理工作。
1.2.4 JPEG
拍照数据的存储通过该硬件模块进行jpeg编码工作。
2 双摄技术
采用两个摄像头模组分别成像,通过特定的算法处理,融合成一张图像,达到特定成像需求目的。
2.1 背景虚化(RGB+RGB)
采用两个RGB相机模组,同时对景物进行成像。利用三角测量原理,计算出每个点的景深数据。依照该数据进行前景与背景的分离,再通过虚化算法针对背景虚化处理。
注:由于三角测量原理的限制,需要对两个相机模组进行标定,使两者成像平面位于同一平面,并且保持像素对齐。
2.2 暗光提升(RGB+MONO)
MONO:黑白相机模组。
MONO无Bayer滤光片,暗光条件下,可以获得更多进光量,进而保存更多图像细节;RGB可补充颜色分量,保证暗光下的成像质量。
由于需要对两个相机模组的成像进行融合,需要进行标定,使两个相机模组可保持像素对齐。
2.3 光学变焦(广角+长焦)
变焦:在对焦马达中,通过调整单个透镜进行焦距变换实现。
局限:受体积限制,无法从单个相机模组中得到更大的变焦范围。
光学变焦:采用两个具有不同焦距的模组共同实现。通过广角模组呈现大范围场景,通过长焦模组看到更远场景。拍照时,模组切换以及优秀的融合算法实现了相对平滑的变焦操作。







