1. 功能说明
本文示例将实现四轮全向底盘绘制正六边形的功能。

2. 结构说明
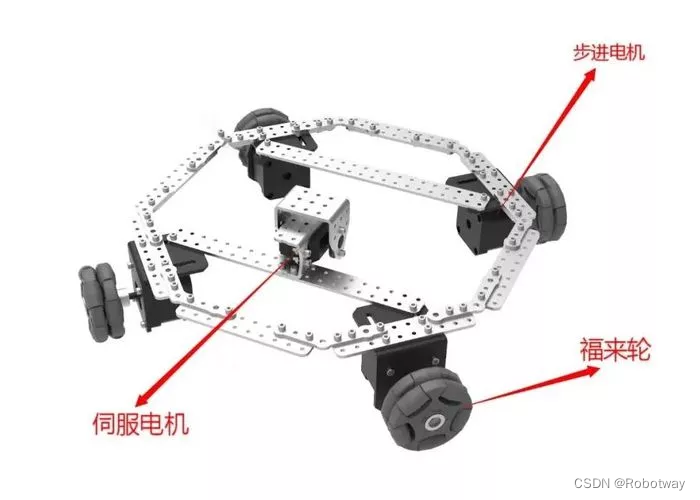
全向底盘具备结构简单、运动灵活等特点。四轮全向底盘采用全向福来轮作为执行轮,四个轮成正方形分布,且每个轮在斜45°方向安装。全向福来轮由主轮和副轮组成,主轮和副轮成垂直分布。

驱动系统采用精度较高的42步进电机;执行末端为伺服电机。通过四个步进电机运动的相互配合,四个步进电机驱动将圆周转动转化为直线运动。
3. 电子硬件
本实验中采用了以下硬件:
| 主控板 | Basra控制板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| SH-ST步进电机扩展板 | |
| 电池 | 11.1v动力电池 |
| 其它 | 步进电机、标准舵机、笔架 |
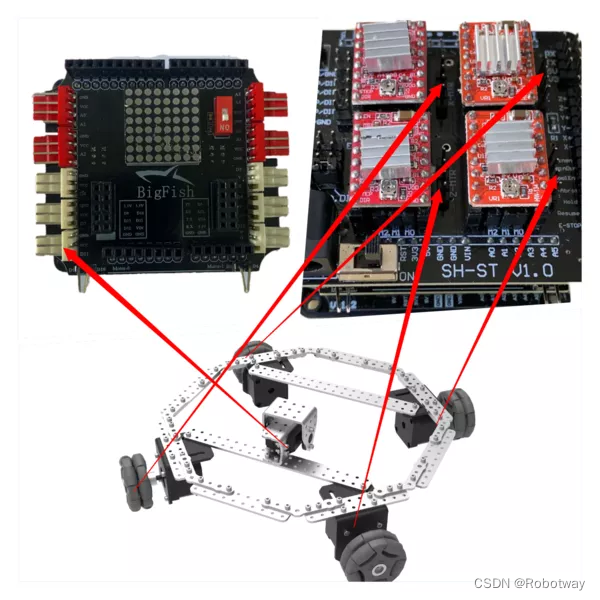
电路连接:
舵机连接在Bigfish扩展板的D11针脚上;4个步进电机与SH-ST扩展板的连接位置见下图:
4. 功能实现
编程环境:Arduino 1.8.19
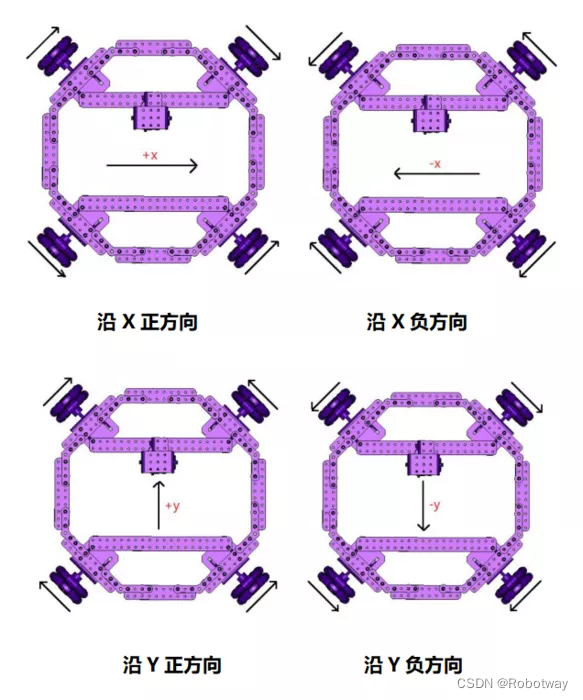
① 四轮全向底盘运动算法
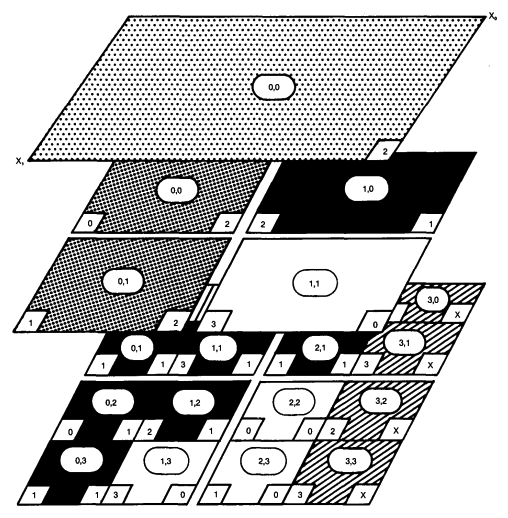
全向福来轮底盘的一个特点是可以灵活的全向移动,四轮全向轮的全向移动需要四个轮的相互配合,运动方向和各个轮的转向关系如图所示(箭头方向表示轮或车的运动方向):
多边形绘制算法:
正六边形和其它多边形有一个相同的条件-每个顶角角度一致 ,并且所有的多边形外角=360/n(n为边数),这样的话两条相邻边的角度是一致的,所以在这里我们采用了一种算法,该算法的思路是:
先以多边形的一个顶点A创建直角坐标系,然后确定相邻一条边上另一个顶点B的坐标,利用插补法完成一条边的绘制,然后再以顶点B为原点创建一个直角坐标系,继续绘制下一条边,重复上面的流程,完成多边形绘制,通过这种方法,我们只需要知道多边形的边长和边数就可以完成任意正多边形的绘制。
多边形计算公式:
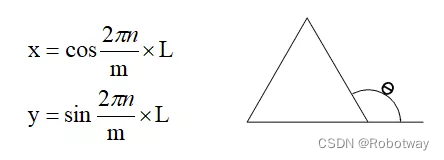
n——为循环中绘制的第几条边为0~(m-1)变量值
m——总边数
L——边长
备注:坐标系原点为上一笔最终点,坐标系方向不变。
② 示例程序
下面给大家提供一个绘制边长为10cm的正六边形参考例程(stepper_car_write_sexangle.ino),大家看懂之后可尝试修改参数,完成其它正多边形的绘制:
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-03-09 https://www.robotway.com/------------------------------*/#include <Servo.h>/** en:定义步进电机使能引脚* servo_pin:定义舵机引脚* stepper_count:定义步进电机数量* stepperPulse_delay:定义步进电机脉冲生成间隔* LINE_BUFFER_LENGTH:定义串口接收数据长度*/#define en 8#define servo_pin 11#define stepper_count 4#define stepperPulse_delay 850#define LINE_BUFFER_LENGTH 512/** positive_x:定义正向 X 轴* positive_y:定义正向 Y 轴* negative_x:定义负向 X 轴* negative_y:定义负向 Y 轴*/#define positive_x 0#define positive_y 1#define negative_x 2#define negative_y 3/** stepperDir_pin:定义步进电机方向引脚数组* stepperStp_pin:定义步进电机步进引脚数组* dir: x: 5, y: 6, z: 7, a: 13* stp: x: 2, y: 3, z: 4, a: 12*/int stepperDir_pin[4] = {5, 6, 7, 13};int stepperStp_pin[4] = {2, 3, 4, 12};Servo myServo;const int stepsPerRevolution = 3200; //定义步进电机每圈转动的步数,此处为16细分,每圈 3200 步int penZup = 145; //定义舵机抬起角度int penZdown = 150; //定义舵机放下角度float LEAD = sqrt(2) * 58 * PI; //定义步进电机转动 1 圈,小车前进的距离,单位 mmfloat l = 60; //定义六边形边长//定义六边形顶点坐标数组float coords[7][2] = {-l*1/2, -sqrt(3)/2*l,l*1/2, -sqrt(3)/2*l,l, 0,l*1/2, sqrt(3)/2*l,-l*1/2, sqrt(3)/2*l,-l, 0 ,-l*1/2, -sqrt(3)/2*l};float Xmin = -60; //定义绘图范围float Xmax = 60;float Ymin = -60;float Ymax = 60;float Xpos = 0;float Ypos = 0;void setup() {Serial.begin(9600); //开启串口通信,波特率为 9600myServo.attach(servo_pin);myServo.write(penZup);for(int i=0;i<stepper_count;i++){pinMode(stepperDir_pin[i], OUTPUT);pinMode(stepperStp_pin[i], OUTPUT); }pinMode(en, OUTPUT);digitalWrite(en, LOW);delay(1000);}void loop(){draw_sexangle();while(1){};}//六边形绘制函数void draw_sexangle(){drawLine(coords[0][0], coords[0][1]);delay(200);for(int i=0;i<sizeof(coords) / sizeof(coords[0]);i++){penDown();delay(200);drawLine(coords[i][0], coords[i][1]);penUp();}}//直线插补函数,参数为点坐标值void drawLine(float x1, float y1){int dx, dy, n, k, i, f, stepInc;if (x1 >= Xmax) {x1 = Xmax;}if (x1 <= Xmin) {x1 = Xmin;}if (y1 >= Ymax) {y1 = Ymax;}if (y1 <= Ymin) {y1 = Ymin;}x1 = (int)(x1/LEAD*stepsPerRevolution);y1 = (int)(y1/LEAD*stepsPerRevolution);float x0 = Xpos;float y0 = Ypos;dx = abs(x1-x0);dy = abs(y1-y0);n = abs(dx+dy);if(x1 >= x0){k = y1 >= y0 ? 1:4;}else{k = y1 >= y0 ? 2:3;}for(i=0,f=0;i<n;i+=1){if(f>=0){switch(k){case 1:stepper_move(positive_x, 1);f = f - dy;//Serial.println("+x");break;case 2:stepper_move(negative_x, 1);f = f - dy;//Serial.println("-x");break;case 3:stepper_move(negative_x, 1);f = f - dy;//Serial.println("-x");break;case 4:stepper_move(positive_x, 1);f = f - dy;//Serial.println("+x");break;default:break;}}else{switch(k){case 1:stepper_move(positive_y, 1);f = f + dx;//Serial.println("+y");break;case 2:stepper_move(positive_y, 1);f = f + dx;//Serial.println("+y");break;case 3:stepper_move(negative_y, 1);f = f + dx;//Serial.println("-y");break;case 4:stepper_move(negative_y, 1);f = f +dx;//Serial.println("-y");break;default:break;}}}Xpos = x1;Ypos = y1;}//小车行进方向控制函数void stepper_dir(int positiveDir_x, int positiveDir_y, int negativeDir_x, int negativeDir_y){int dir_value[] = {positiveDir_x, positiveDir_y, negativeDir_x, negativeDir_y};for(int i=0;i<stepper_count;i++){//Serial.print(dir_value[i]);//Serial.print(",");digitalWrite(stepperDir_pin[i], dir_value[i]);}//Serial.println();for(int j=0;j<stepper_count;j++){digitalWrite(stepperStp_pin[j], HIGH);} delayMicroseconds(stepperPulse_delay);for(int j=0;j<stepper_count;j++){digitalWrite(stepperStp_pin[j], LOW);}delayMicroseconds(stepperPulse_delay);}//步进电机转动函数,参数 dir_xy:步进电机转动方向,steps:步进电机转动步数void stepper_move(int dir_xy, int steps){for(int i=0;i<abs(steps);i++){switch(dir_xy){case 0:stepper_dir(1, 1, 0, 0);break;case 1:stepper_dir(1, 0, 1, 0);break;case 2:stepper_dir(0, 0, 1, 1);break;case 3:stepper_dir(0, 1, 0, 1);break;default:break; } }}//舵机抬笔函数void penUp(){myServo.write(penZup);}//舵机落笔函数void penDown(){myServo.write(penZdown);}5. 资料内容
① 画图-例程源代码
② 画图-样机3D文件
资料内容详见:四福来轮全向底盘(十字)