一、背景
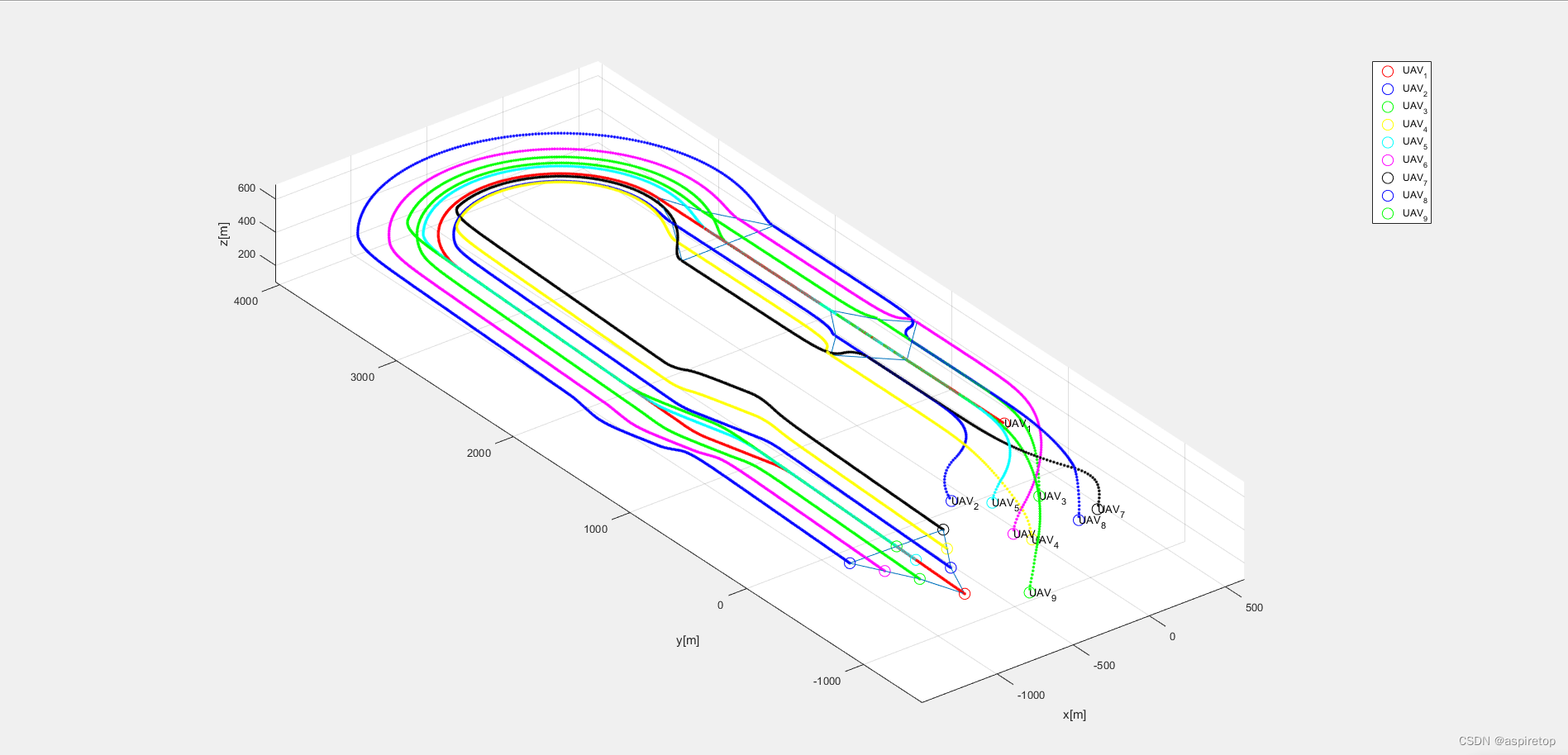
九架无人机由不同初始位置,集结为正方形编队,之后沿直线变换为三角形编队,保持三角形编队转弯、直线飞行、爬升的仿真过程
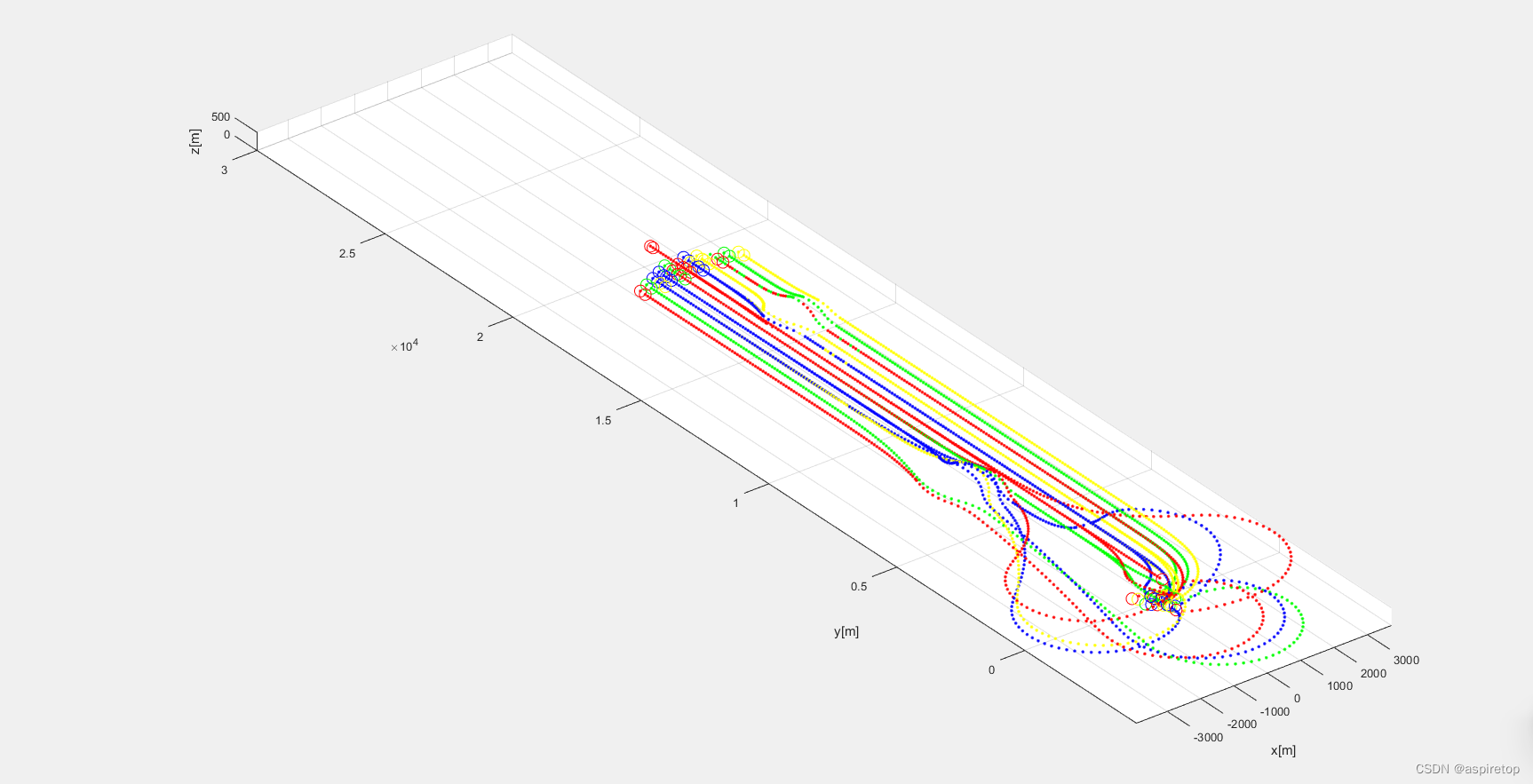
实现了21架无人机的编队形成、编队重构、编队保持以及避撞
二、代码
WilliamFun/UAV_swarm_3d_simulation: Simulation of coordinated formation control of UAV based on leader-follower and artificial potential (github.com)
九架无人机由不同初始位置,集结为正方形编队,之后沿直线变换为三角形编队,保持三角形编队转弯、直线飞行、爬升的仿真过程
实现了21架无人机的编队形成、编队重构、编队保持以及避撞
WilliamFun/UAV_swarm_3d_simulation: Simulation of coordinated formation control of UAV based on leader-follower and artificial potential (github.com)