样本:一金属件上圆形焊点,半径约为8mm,高度在3mm以内。
采集:固定相机、光源,利用步进电机带动载物台沿Z轴方向移动,采集载物台上样本的序列图像。
要求:利用聚焦恢复深度技术(SFF)重建焊点
整理一下焦距和景深的计算公式,以后方便看。ヾ(≧▽≦*)o
计算过程如下:
针对样品尺寸,相机对应的视野范围应大于, 根据采集序列图像的具体情况,参考论文《基于单目聚焦序列图像的对象三维轮廓构建研究》,采集序列图像时相机与样本距离发生变化,序列图像中样本区域的占比可能有所不同,需要进行图像裁剪和图像缩放。因此,预留出一定的裁剪空间,将相机视野范围(FOV)定为
。
1.焦距的计算:
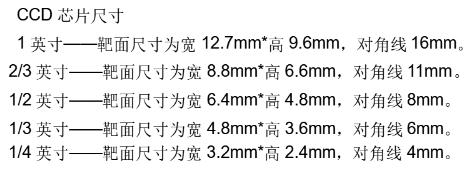
选取图像传感器芯片尺寸为 2/3'',其靶面尺寸为,对角线长度为11mm
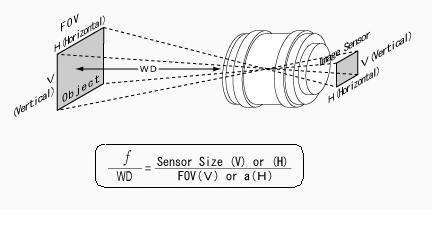
假设工作距离(WD)为150mm,则根据公式可计算出焦距
则镜头焦距定为50mm
2.景深的计算:
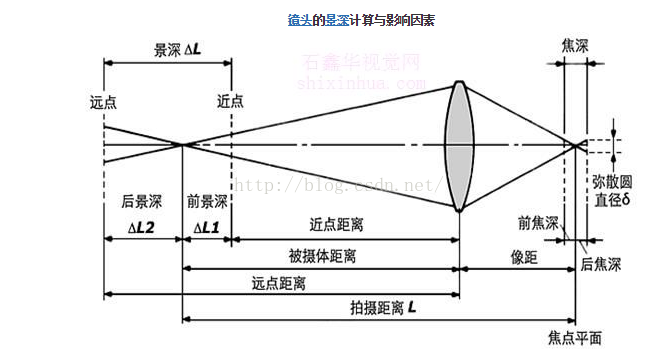
前景深: 后景深:
景深:
F——光圈值
f ——焦距
L——对焦距离
——容许弥散圆直径
根据高斯公式 , 可计算出像距为75mm, 则 L = 225mm
容许弥散圆的计算公式:,d是CCD芯片对角线长度
详情可参考 工业相机的景深计算
若光圈值为F1.4,则景深