目录
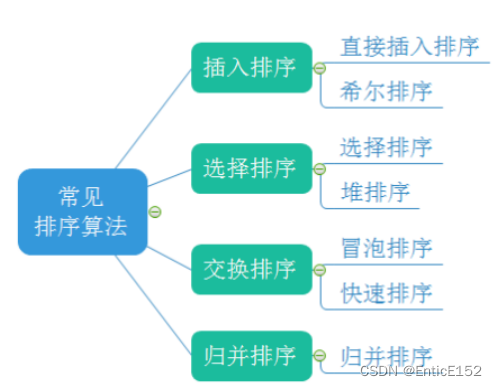
常用排序算法的实现::
1.排序的概念及其运用
2.插入排序
3.希尔排序
4.选择排序
5.冒泡排序
6.堆排序
7.快速排序
8.归并排序
9.排序算法复杂度及稳定性分析
10.排序选择题练习
常用排序算法的实现::
1.排序的概念及其运用
排序:所谓排序,就是一串记录,按照其中的某个或某些关键字的大小,递增或递减的排列起来的操作。
稳定性:假定在待排序的记录序列中,存在多个具有相同的关键字的记录,若经过排序,这些记录的相对次序保持不变,即在原序列中,r[i]=r[j],且r[i]在r[j]之前,而在排序后的序列中,r[i]仍在r[j]之前,则称这种排序算法是稳定的,否则称之为不稳定。
内部排序:数据元素全部放在内存中的排序。
外部排序:数据元素太多不能同时放在内存中,根据排序过程的要求不能在内外存之间移动数据的排序。


测试排序的性能对比:
//测试排序的性能对比
void TestOP()
{srand(time(0));const int N = 100000;int* a1 = (int*)malloc(sizeof(int) * N);int* a2 = (int*)malloc(sizeof(int) * N);int* a3 = (int*)malloc(sizeof(int) * N);int* a4 = (int*)malloc(sizeof(int) * N);int* a5 = (int*)malloc(sizeof(int) * N);int* a6 = (int*)malloc(sizeof(int) * N);for (int i = 0; i < N; ++i){a1[i] = rand();a2[i] = a1[i];a3[i] = a1[i];a4[i] = a1[i];a5[i] = a1[i];a6[i] = a1[i];}int begin1 = clock();InsertSort(a1, N);int end1 = clock();int begin2 = clock();ShellSort(a2, N);int end2 = clock();int begin3 = clock();SelectSort(a3, N);int end3 = clock();int begin4 = clock();HeapSort(a4, N);int end4 = clock();int begin5 = clock();QuickSort(a5, 0, N - 1);int end5 = clock();int begin6 = clock();MergeSort(a6, N);int end6 = clock();printf("InsertSort:%d\n", end1 - begin1);printf("ShellSort:%d\n", end2 - begin2);printf("SelectSort:%d\n", end3 - begin3);printf("HeapSort:%d\n", end4 - begin4);printf("QuickSort:%d\n", end5 - begin5);printf("MergeSort:%d\n", end6 - begin6);free(a1);free(a2);free(a3);free(a4);free(a5);free(a6);
}2.插入排序
插入排序基本思想:
插入排序是一种简单的插入排序算法,其基本思想是:把待排序的记录按其关键码值的大小逐个插入到一个已经排好序的有序序列中,直到所有的记录插入完为止,得到一个新的有序序列。
实际中我们玩扑克牌时,就用了插入排序的思想:
void InsertSort(int* a, int n)
{for (int i = 0; i < n - 1; i++){int end = i;int tmp = a[end] + 1;while (end >= 0){if (a[end] > tmp){a[end + 1] = a[end];--end;}else{break;}}a[end + 1] = tmp;}
}3.希尔排序(缩小增量排序)
希尔排序的基本思想:
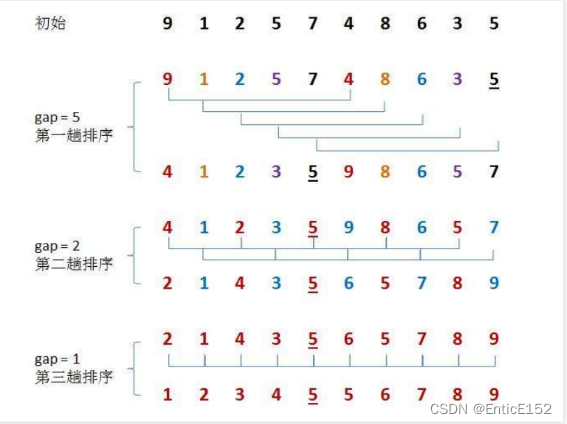
希尔排序又称缩小增量法,希尔排序的基本思想是:先选定一个整数,把待排序文件中所有记录分成各组,所有距离为gap的记录分在同一组内,并对每一组内的记录进行排序,然后重复上述分组和排序的工作。当达到gap=1时,所有记录在同一组内已排好序。
希尔排序的特性总结:
1.希尔排序是对插入排序的优化。
2.当gap>1时都是预排序,目的是让数组更接近有序。当gap==1时,数组已经接近有序了,这样就会很快,整体而言,可以达到优化的效果。
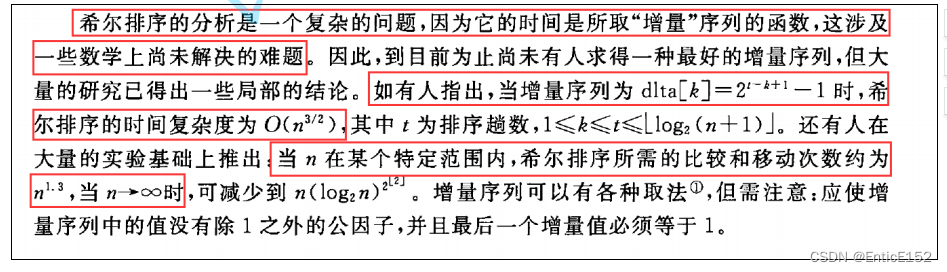
3.希尔排序的时间复杂度不好计算,因为gap的取值方法很多,导致很难去计算,因此在很多书中给出的希尔排序的时间复杂度都不固定。
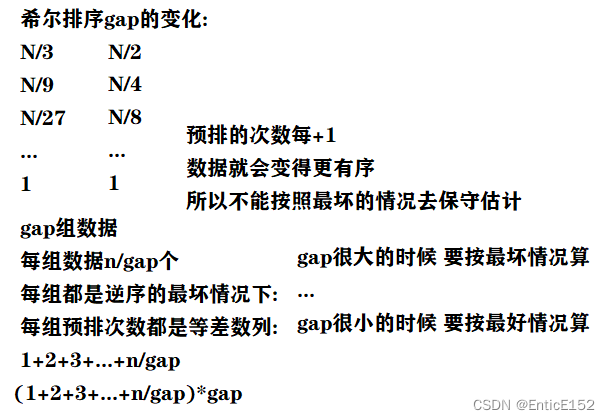
《数据结构-用面相对象方法与C++描述》--- 殷人昆
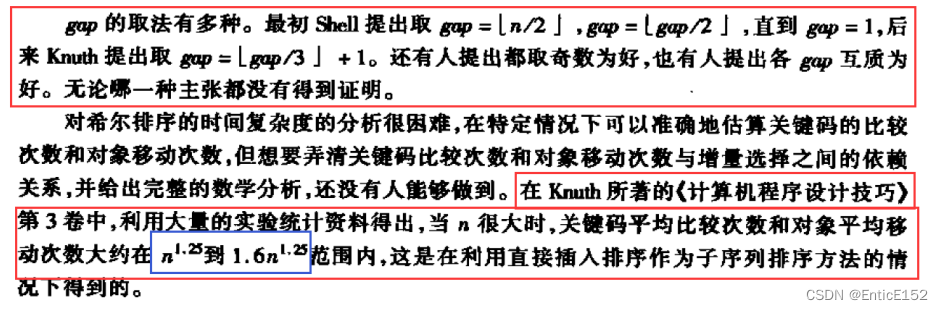
注:我们的gap是按照Knuth提出的方式取值的,而且Knuth进行了大量的实验统计,我们暂时就按照:O(n^1.25)到O(1.6*n^1.25)来算。
4.稳定性:不稳定
代码实现:
//希尔排序(缩小增量排序)
//希尔排序又称缩小增量法 希尔排序的基本思想是:先选定一个整数,把待排序文件中所有
//记录分成n个组 所有距离为的记录分在同一个组 并对每一组内的记录进行排序,然后取重复上述分组
//和排序的工作,当达到1时,所有记录在统一组内排好序
//希尔排序的时间复杂度为O(N^1.3) 数据量特别大时略逊于N*logN
void ShellSort(int* a, int n)
{//gap > 1预排序 gap == 1直接插入排序int gap = n;while (gap > 1){//gap = gap / 2;gap = gap / 3 + 1;for (int j = 0; j < gap; ++j){for (int i = j; i < n - gap; i += gap){//[0,end] 插入 end+gap [0,end+gap]有序——间隔为gap的数据int end = i;int tmp = a[end + gap];while (end >= 0){if (a[end] > tmp){a[end + gap] = a[end];end -= gap;}else{break;}}a[end + gap] = tmp;}}}
}4.选择排序
选择排序的基本思想:
每一次从待排序的数据元素中选出最小(或最大)的一个元素,存放在序列的起始位置,直到全部待排序的数据元素排完。
在元素集合array[i]—array[n-1]中选择关键码最大(小)的数据元素,若它不是这组元素中的最后一个(第一个)元素,则将它与这组元素中的最后一个(第一个)元素互换,在剩余的array[i]—array[n-2](array[i+1]—array[n-1])集合中,重复上述步骤,直到集合剩余一个元素。

选择排序的特性总结:
1.选择排序的代码非常好理解,但是效率不是很好,实际中很少用
2.时间复杂度:O(N^2)
3.空间复杂度:O(1)
4.稳定性:不稳定
代码实现:
//选择排序
//最坏时间复杂度:O(N^2)
//最好时间复杂度:O(N^2)
void Swap(int* p1, int* p2)
{int tmp = *p1;*p1 = *p2;*p2 = tmp;
}
void SelectSort(int* a, int n)
{int begin - 0.end = n - 1;while (begin < end){//选出最小的放begin位置//选出最大的放end位置int mini = begin, maxi = begin;for (int i = begin + 1; i <= end; ++i){if (a[i] > a[maxi]){maxi = i;}if (a[i] < a[mini]){mini = i;}}Swap(&a[begin], &a[mini]);//最大数据在第一个位置时需要修正一下maxiif (maxi == begin)maxi = mini;Swap(&a[end], &a[maxi]);++begin;--end;}
}5.冒泡排序
基本思想:
所谓交换,就是根据序列中两个记录键值的比较结果来对换这两个记录在序列中的位置,冒泡排序的特点是:将键值较大的记录向序列的尾部移动,键值较小的数据向序列的前部移动。
冒泡排序的特性总结:
1.时间复杂度:O(N^2)
2.空间复杂度:O(1)
3.稳定性:稳定
代码实现:
//冒泡排序
//最坏时间复杂度——O(N^2)
//最好时间复杂度——O(N)
void BubbleSort(int* a, int n)
{for (int j = 0; j < n; ++j){int exchange = 0;for (int i = 1; i < n - j; ++i){if (a[i - 1] > a[i]){Swap(&a[i - 1], &a[i]);exchange = 1;}}if (exchange == 0){break;}}
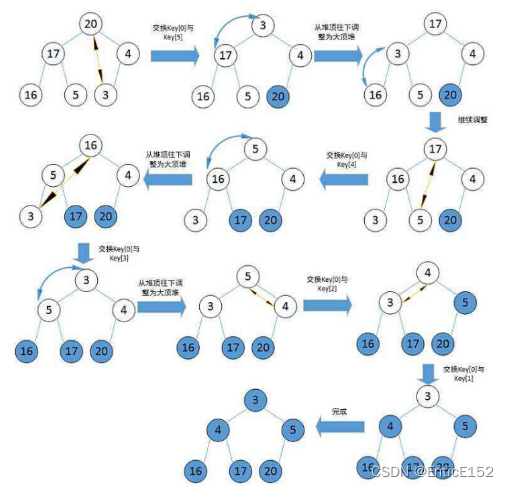
}6.堆排序
堆排序(HeapSort)是指利用堆这种数据结构所设计的一种排序算法,它是选择排序的一种,通过堆来进行选择数据,需要注意的是升序要建大堆,降序要建小堆。
堆排序的特性总结:
1.堆排序使用堆来选数,效率就高了很多
2.时间复杂度:O(N*logN)
3.空间复杂度:O(1)
4.稳定性:不稳定
代码实现:
void Swap(int* p1, int* p2)
{int tmp = *p1;*p1 = *p2;*p2 = tmp;
}
void AdjustDown(int* a, int n, int parent)
{int minChild = parent * 2 + 1;while (minChild < n){if (minChild + 1 < n && a[minChild + 1] > a[minChild]);{minChild++;}if (a[minChild] > a[parent]){Swap(&a[minChild], &a[parent]);parent = minChild;minChild = parent * 2 + 1;}else{break;}}
}
void HeapSort(int* a, int n)
{for (int i = (n - 1 - 1) / 2; i >= 0; --i){AdjustDown(a, n, i);}int i = 1;while (i < n){Swap(&a[0], &a[n - i]);AdjustDown(a, n - i, 0);++i;}
}7.快速排序
//假设按照升序对array数组中[left, right)区间中的元素进行排序
void QuickSort(int array[], int left, int right)
{if(right - left <= 1)return;// 按照基准值对array数组的 [left, right)区间中的元素进行划分int div = partion(array, left, right);// 划分成功后以div为边界形成了左右两部分 [left, div) 和 [div+1, right)// 递归排[left, div)QuickSort(array, left, div);// 递归排[div+1, right)QuickSort(array, div+1, right);
}//快速排序
//单趟排序:
//1.选1个key(一般是第一个或者是最后一个)
//2.单趟排序要求小的在key的左边,大的在key的右边
//相遇位置如何保证比key要小——左边第一个做key R先走
//1.R停下来 L遇到R 二者相遇 相遇位置比key小
//2.L停下来 R遇到L 二者相遇 相遇位置比key小
//发生第二种情况一定是R没有找到小的和L相遇,但此时L的位置已经被换成比key小的数据
//同样的道理:如果右边第一个做key——L先走
//单趟排序的价值
//1.key已经找到了它的最终位置,这个数已经排好了
//2.分割出去了两个子区间,如果子区间有序。整体就有序了
//子区间如何有序呢?——子区间递归
//最好时间复杂度:O(N*logN)
//最坏时间复杂度:O(N^2)
int PartSort(int* a, int left, int right)
{//数组之间的交换 不能和值换 要和对应的位置换int keyi = left;while (left < right){//R找小while (left < right && a[right] >= a[keyi]){--right;}//L找大while (left < right && a[left] <= a[keyi]){++left;}if(left < right)Swap(&a[left], &a[right]);}int meeti = left;Swap(&a[meeti], &a[keyi]);return meeti;
}Hoare版本
//优化快速排序:1.三数取中 2.小区间优化减少递归次数
//三数取中
int GetMidIndex(int* a, int left, int right)
{int mid = (right + left) / 2;if (a[left] < a[mid]){if (a[mid] < a[right]){return mid;}else if (a[left] > a[right]){return left;}else{return right;}}else//a[left]>=a[mid]{if (a[mid] > a[right]){return mid;}else if (a[left] > a[right]){return left;}else{return right;}}
}
//Hoare
int PartSort1(int* a, int left, int right)
{//三数取中int mid = GetMidIndex(a, left, right);Swap(&a[left], &a[mid]);int keyi = left;while (left < right){//R找小while (left < right && a[right] >= a[keyi]){--right;}//L找大while (left < right && a[left] <= a[keyi]){++left;}if (left < right)Swap(&a[left], &a[right]);}int meeti = left;Swap(&a[meeti], &a[keyi]);return meeti;
}
//[begin,end]
void QuickSort(int* a, int begin, int end)
{if (begin >= end){return;}if (end - begin <= 8){InsertSort(a + begin, end - begin + 1);}else{int keyi = PartSort1(a, begin, end);//[begin,keyi-1] keyi [keyi+1,end]QuickSort(a, begin, keyi - 1);QuickSort(a, keyi + 1, end);}
}挖坑法

//挖坑法
//理解:1.左边是坑必然右边先走找数填坑 2.相遇位置必然是坑
int PartSort2(int* a, int left, int right)
{//三数取中int mid = GetMidIndex(a, left, right);Swap(&a[left], &a[mid]);int keyi = left;int key = a[left];int hole = left;while (left < right){//右边找小 填到左边的坑while (left < right && a[right] >= key){--right;}a[hole] = a[right];hole = right;//左边找大填到右边的坑while (left < right && a[left] <= key){++left;}a[hole] = a[left];hole = left;}a[hole] = key;return hole;
}
//[begin,end]
void QuickSort(int* a, int begin, int end)
{if (begin >= end){return;}if (end - begin <= 8){InsertSort(a + begin, end - begin + 1);}else{int keyi = PartSort2(a, begin, end);//[begin,keyi-1] keyi [keyi+1,end]QuickSort(a, begin, keyi - 1);QuickSort(a, keyi + 1, end);}
}前后指针法:
//前后指针法
//cur找小 prev紧跟着cur prev和cue之间间隔的是比key大的值
//cur遇到比key小的值时 就停下来 ++prev
//交换prev和cur位置的值
int PartSort3(int* a, int left, int right)
{//三数取中int mid = GetMidIndex(a, left, right);Swap(&a[left], &a[mid]);int keyi = left;int prev = left;int cur = left + 1;while (cur <= right){if (a[cur] < a[keyi] && ++prev != cur)Swap(&a[cur], &a[prev]);++cur;}//如果交换的是数组中的值 int key = a[left] Swap(&left,&a[prev])只是和局部变量key进行交换 并没有改变数组中的值Swap(&a[keyi], &a[prev]);return prev;
}
void QuickSort(int* a, int begin, int end)
{if (begin >= end){return;}if (end - begin <= 8){InsertSort(a + begin, end - begin + 1);}else{int keyi = PartSort3(a, begin, end);//[begin,keyi-1] keyi [keyi+1,end]QuickSort(a, begin, keyi - 1);QuickSort(a, keyi + 1, end);}
}快速排序非递归:
#pragma once
#include<stdio.h>
#include<stdlib.h>
#include<stdbool.h>
#include<assert.h>
//静态栈
/*#define N 100
typedef int STDataType;
struct Stack
{STDataType a[N];int top;
};*/
//动态栈
typedef char STDataType;
typedef struct Stack
{STDataType * a;int top;int capacity;
}ST;
void StackInit(ST* ps);
void StackDestory(ST* ps);
void StackPush(ST* ps, STDataType x);
void StackPop(ST* ps);
bool StackEmpty(ST* ps);
int StackSize(ST* ps);
//访问栈顶数据
STDataType StackTop(ST* ps);
#include"Stack.h"
void StackInit(ST* ps)
{assert(ps);ps->a = NULL;ps->top = ps->capacity = 0;
}
void Destory(ST* ps)
{assert(ps);free(ps->a);ps->a = NULL;ps->capacity = ps->top = 0;
}
//数据结构建议不要直接访问结构体数据,一定要通过函数接口访问
//解耦:高内聚,低耦合
void StackPush(ST* ps, STDataType x)
{assert(ps);if (ps->top == ps->capacity){int newCapacity = ps->capacity == 0 ? 4 : ps->capacity * 2;STDataType* tmp = (STDataType*)realloc(ps->a, newCapacity * sizeof(STDataType));if (tmp == NULL){perror("realloc fail");exit(-1);}ps->a = tmp;ps->capacity = newCapacity;ps->a[ps->top] = x;ps->top++;}
}
void StackPop(ST* ps)
{assert(ps);assert(!StackEmpty(ps));--ps->top;
}
STDataType StackTop(ST* ps)
{assert(ps);//为空不能访问栈顶元素assert(!StackEmpty(ps));return ps->a[ps->top - 1];
}
bool StackEmpty(ST* ps)
{assert(ps);return ps->top == 0;
}
int StackSize(ST* ps)
{assert(ps);return ps->top;
}
#include"Stack.h"
//快速排序的非递归
//改非递归:递归函数中的栈帧保存什么 数据结构中的栈就保存什么
void QuickSortNonR(int* a, int begin, int end)
{ST st;StackInit(&st);StackPush(&st, begin);StackPush(&st, end);while (!StackEmpty(&st){int right = StackTop(&st);StackPop(&st);int left = StackTop(&st);StackPop(&st);if (left >= right){continue;}int keyi = PartSort3(a, left, right);//[left,keyi-1] l=keyi [keyi+1,right]StackPush(&st, keyi+1);StackPush(&st, right);StackPush(&st, left);StackPush(&st, keyi-1);}StackDestory(&st);
}
//优化:在区间为1或者区间不存在的时候 区间值不压入栈中
void QuickSortNonR(int* a, int begin, int end)
{ST st;StackInit(&st);StackPush(&st, begin);StackPush(&st, end);while (!StackEmpty(&st){int right = StackTop(&st);StackPop(&st);int left = StackTop(&st);StackPop(&st);int keyi = PartSort3(a, left, right);//[left,keyi-1] l=keyi [keyi+1,right]if (keyi + 1 < right){StackPush(&st, keyi + 1);StackPush(&st, right);}if (left < right - 1){StackPush(&st, left);StackPush(&st, keyi - 1);}}StackDestory(&st);
}快速排序的特性总结:
1.快速排序整体的综合性能和使用场景都是比较好的,所以才敢叫快速排序
2.时间复杂度:O(N*logN)
3.空间复杂度:O(logN)
4.稳定性:不稳定
8.归并排序
基本思想:
归并排序的特性总结:
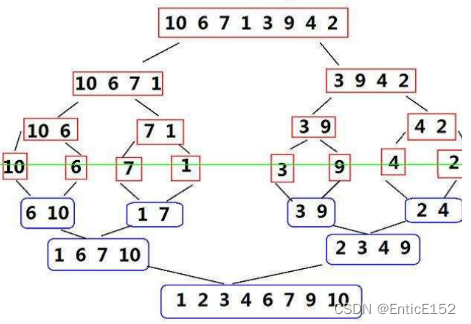
//归并排序
//归并思想:左右区间均有序 取小的尾插到新数组
//归并排序的时间复杂度:O(N*logN) 空间复杂度为O(N)
//归并排序写子函数的原因:避免频繁malloc
void _MergeSort(int* a, int begin, int end, int* tmp)
{if (begin == end){return;}int mid = (end + begin) / 2;//[begin,mid] [mid+1,end]_MergeSort(a, begin, mid, tmp);_MergeSort(a, mid + 1, end, tmp);//归并 取小的尾插//[begin,mid] [mid+1,end]int begin1 = begin, end1 = mid;int begin2 = mid + 1, end2 = end;int i = begin;while (begin1 <= end1 && begin2 <= end2){if (a[begin1] <= a[begin2]){tmp[i++] = a[begin1++];}else{tmp[i++] = a[begin2++];}}while (begin1 <= end1){tmp[i++] = a[begin1++];}while (begin2 <= end2){tmp[i++] = a[begin2++];}//拷贝回原数组——归并哪部分就拷贝哪部分回去memcpy(a + begin, tmp + begin, (end - begin + 1) * sizeof(int));
}
void MergeSort(int* a, int n)
{int* tmp = (int*)malloc(sizeof(int) * n);if (tmp == NULL){perror("malloc fail");return;}_MergeSort(a, 0, n - 1, tmp);free(tmp);tmp = NULL;
}归并排序非递归
//归并排序的非递归
//问题:控制边界 该代码只能处理2的次方次个数据
void MergeSortNonR(int* a, int n)
{int* tmp = (int*)malloc(sizeof(int) * n);if (tmp == NULL){perror("malloc fail");return;}int gap = 1;while (gap < n){//gap个数据 gap个数据进行归并for (int j = 0; j < n; j += 2 * gap){//归并 取小的尾插int begin1 = j, end1 = j + gap - 1;int begin2 = j + gap, end2 = j + 2 * gap - 1;int i = j;while (begin1 <= end1 && begin2 <= end2){if (a[begin1] <= a[begin2]){tmp[i++] = a[begin1++];}else{tmp[i++] = a[begin2++];}}while (begin1 <= end1){tmp[i++] = a[begin1++];}while (begin2 <= end2){tmp[i++] = a[begin2++];}}//拷贝回原数组memcpy(a, tmp, n * sizeof(int));gap *= 2;} free(tmp);tmp = NULL;
}
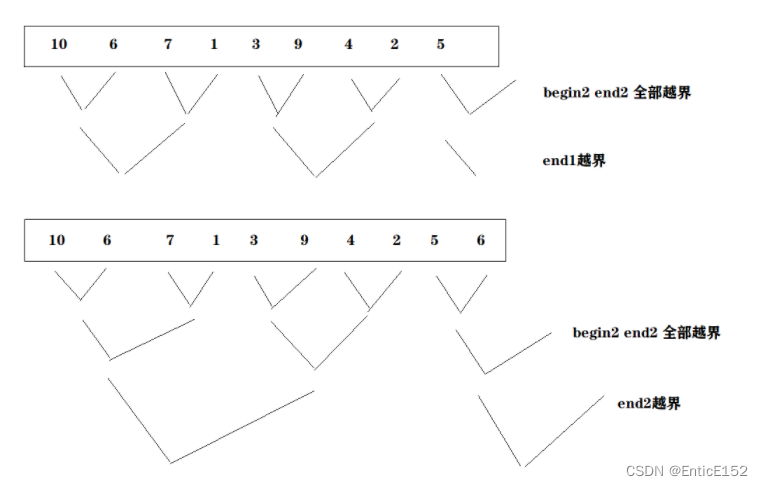
//数据个数不一定是2的整数倍 计算直接按整数倍算的 存在越界 需要修正
//代码优化:控制边界
//三种越界情况:1.第一组end1越界 2.第二组全部越界 3.第三组部分越界
void MergeSortNonR(int* a, int n)
{int* tmp = (int*)malloc(sizeof(int) * n);if (tmp == NULL){perror("malloc fail");return;}int gap = 1;while (gap < n){//gap个数据 gap个数据进行归并for (int j = 0; j < n; j += 2 * gap){//归并 取小的尾插int begin1 = j, end1 = j + gap - 1;int begin2 = j + gap, end2 = j + 2 * gap - 1;//第一组越界 第二组必然越界 只有一组不需要归并 直接跳出循环if (end1 >= n){break;}//第二组全部越界if (begin2 >= n)f{break;}//第二组部分越界if (end2 >= n){//修正一下end2 继续归并end2 = n - 1;}int i = j;while (begin1 <= end1 && begin2 <= end2){if (a[begin1] <= a[begin2]){tmp[i++] = a[begin1++];}else{tmp[i++] = a[begin2++];}}while (begin1 <= end1){tmp[i++] = a[begin1++];}while (begin2 <= end2){tmp[i++] = a[begin2++];}//拷贝回原数组memcpy(a + j, tmp + j, (end2 - j + 1) * sizeof(int));}gap *= 2;printf("\n");}free(tmp);tmp = NULL;
}9.排序算法复杂度及稳定性分析
排序总结
直接插入排序最好的时间复杂度是O(N)最坏的时间复杂度是O(N^2)
希尔排序时间复杂度是O(N^1.3)
选择排序最好的时间复杂度是O(N^2)最坏的时间复杂度是O(N^2)
堆排序最好的时间复杂度是O(N*logN)最坏的时间复杂度是O(N*logN)
冒泡排序最好的时间复杂度是O(N)最坏的时间复杂度是O(N^2)
快速排序最好的时间复杂度是O(N*logN)最坏的时间复杂度是O(N^2)
归并排序最好的时间复杂度是O(N*logN)最坏的时间复杂度是O(N)
快速排序的空间复杂度是O(logN)归并排序的空间复杂度是O(N)
稳定性:数组中相同的值 排完序相对顺序可以做到不变就是稳定的 否则就不稳定
冒泡排序的稳定性好
选择排序的稳定性差
插入排序的稳定性好
希尔排序的稳定性差
堆排序的稳定性差
归并排序的稳定性好
快速排序的稳定性差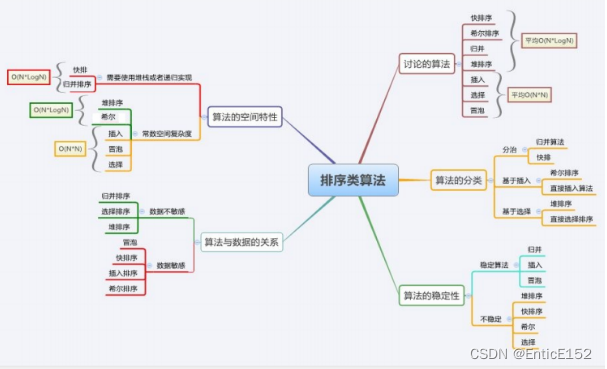
10.排序选择题练习
1. 快速排序算法是基于( )的一个排序算法。
A分治法
B贪心法
C递归法
D动态规划法
2.对记录(54,38,96,23,15,72,60,45,83)进行从小到大的直接插入排序时,当把第8个记录45插入到有序表时,为找到插入位置需比较( )次?(采用从后往前比较)
A 3
B 4
C 5
D 6
3.以下排序方式中占用O(n)辅助存储空间的是
A 简单排序
B 快速排序
C 堆排序
D 归并排序
4.下列排序算法中稳定且时间复杂度为O(n2)的是( )
A 快速排序
B 冒泡排序
C 直接选择排序
D 归并排序
5.关于排序,下面说法不正确的是
A 快排时间复杂度为O(N*logN),空间复杂度为O(logN)
B 归并排序是一种稳定的排序,堆排序和快排均不稳定
C 序列基本有序时,快排退化成冒泡排序,直接插入排序最快
D 归并排序空间复杂度为O(N), 堆排序空间复杂度的为O(logN)
6.下列排序法中,最坏情况下时间复杂度最小的是( )
A 堆排序
B 快速排序
C 希尔排序
D 冒泡排序
7.设一组初始记录关键字序列为(65,56,72,99,86,25,34,66),则以第一个关键字65为基准而得到的一趟快
速排序结果是()
A 34,56,25,65,86,99,72,66
B 25,34,56,65,99,86,72,66
C 34,56,25,65,66,99,86,72
D 34,56,25,65,99,86,72,66
答案:
1.A
2.C
3.D
4.B
5.D
6.A
7.A