新手上路,十几天的学习感觉弯路走了不少,所以打算把学习的知识记录下来,和大家分享,不要嫌弃我,我从非常新手的角度来写。
1、STM32F103RCT6
我也是第一次学习单片机,选择了正点原子家的迷你版,学习到后面才发现什么板子都差不多,只要学会看手册就好了。推荐论坛:CSDN、正点原子官网、51黑论坛等。可以跟着正点原子提供的手把手视频教程把基本的实验做出来再去学习更深入的原理,就能得到事半功倍的效果。不要因为自己不会而畏怯,一旦遇到不懂的知识就马上查资料,还是不懂就去问,好了,感想有点多了。
2、L298N电机驱动模块
以后不要只认为淘宝是买东西的,上面可以找到的资料也很多。解释一下:
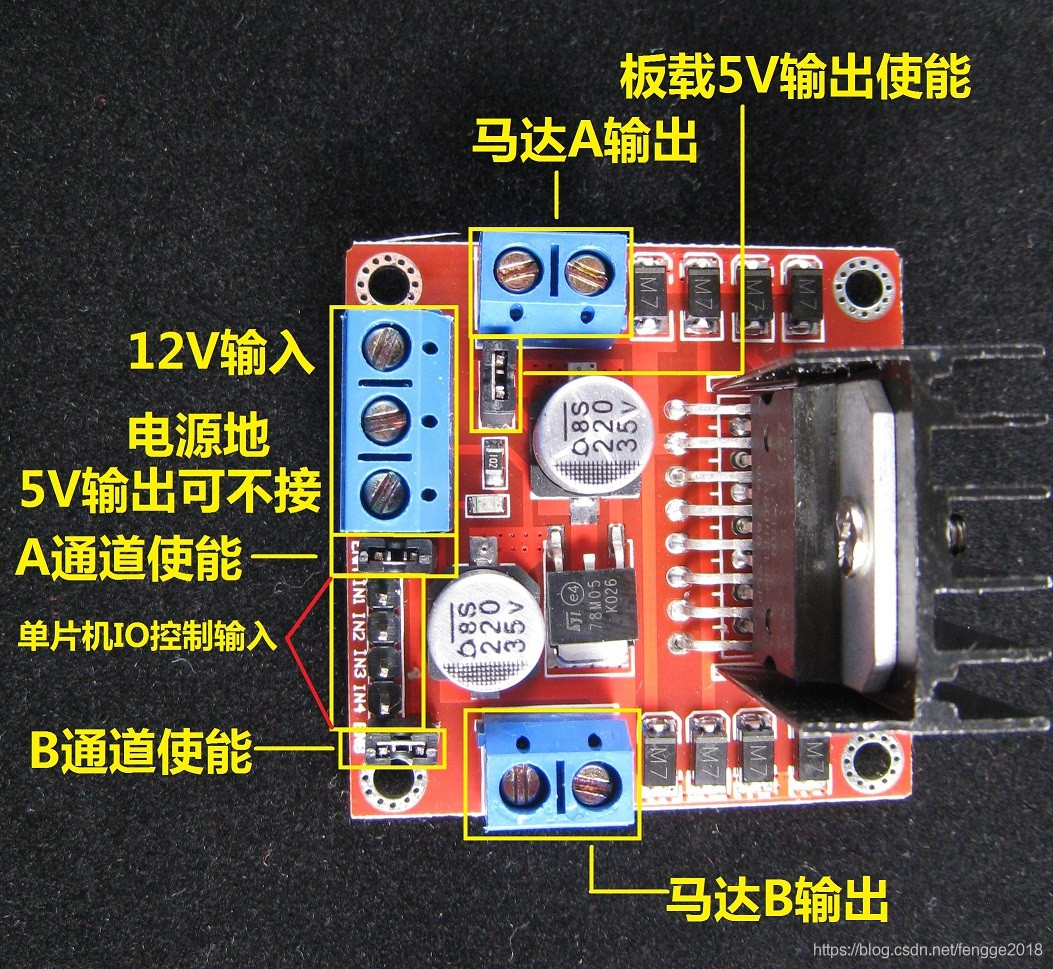
马达A输出(OUT1和OUT2):就是接电机的正负线,无所谓哪个正哪个负,后期如果想让它反转再改回来即可,当你接上后你会发现两个是导通的,这就是电机的知识了,如果想了解电机内部结构,REFER[1]传送门。
12V电源、地线:12V电源接口接12V电池正线,负线接地,同时这个地还要接到单片机的地才行,关于这个12V电源,只要电压尽量不要高于16V不要低于8V就好啦。
5V输出:这是因为L298N模块里自带了稳压功能,可以供出5v电压,以后要是做车,单片机的供电选择可以选这个,但是对于初学者应该还没用到,暂且不理。
A通道使能(EN1):使能是什么……我刚开始学的时候也不懂,但是如果你学了点灯实验,就会知道要配置IO口,使能时钟什么的,这是使能的意思就是让它开启工作状态。这个使能接口是用来控制PWM输入的,如果你还不知道PWM到底是个什么东西,你就先把它理解成一个可以控制电机转速的东西。也就是说,如果单纯只想让电机转动起来,可以不用管这个EN1先,把那个帽子给它盖上,它就和5v接上了,也就是它不使能了。以后如果想用PWM来控制,那就把帽子拔了,把EN脚接到单片机的PWM输出口。
单片机IO口控制输入(IN1、IN2):这两个脚是接到单片机某两个IO口的,只要你分别给个高给个低电平,电机就可以转了。
所以,剩下的IN3、IN4、EN1、OUT1和OUT2都同理了咯。
3、软件实现
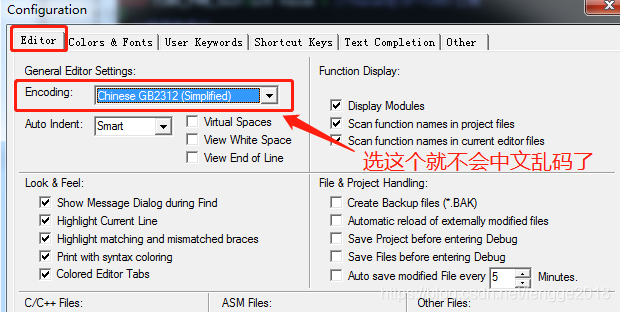
先给大家分享个关于Keil5的小技巧,在界面edit里找到configuration点击去
学习了点灯实验,就知道怎么配置引脚了,然后也知道怎么给引脚高低电平了,注意工程的创建,c文件和h文件都加上去
没有 PWM 控制.
// 先配置引脚
void Motor_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13;//端口配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50MGPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB //暂时先把IO口拉低电平,也可以不拉GPIO_ResetBits(GPIOB,GPIO_Pin_12|GPIO_Pin_13);
}
//在main函数里
void main(void)
{Motor_Init();while(1){delay_ms(1000);GPIO_ResetBits(GPIOB,GPIO_Pin_12);//正转GPIO_SetBits(GPIOB,GPIO_Pin_13);delay_ms(6000);GPIO_ResetBits(GPIOB,GPIO_Pin_13);//反转GPIO_SetBits(GPIOB,GPIO_Pin_12);delay_ms(1000);}
}
通过上面的代码就可以实现电机简单地转动了,还可以让电机左转右转,看你实现吧
这里的接线是PB12->IN1、PB13->IN2,EN1的帽子要盖上。
有 PWM 控制.
//定义电机,左电机为A(PB12,PB13,PA8),右电机为B(PB14,PB15,PA11)
//PB(12,13,14,15)接驱动模块IN脚,PA(8,11)接EN脚用来PWM输出
/在.c文件里
void Motor_Init(void)
{RCC->APB2ENR|=1<<3; //PORTB时钟使能 ,位2 GPIOB->CRH&=0X0000FFFF; //PORTB12 13 14 15推挽输出GPIOB->CRH|=0X22220000; //PORTB12 13 14 15推挽输出
}
void PWM_Init(u16 arr,u16 psc)
{ MiniBalance_Motor_Init(); //初始化电机控制所需IORCC->APB2ENR|=1<<11; //使能TIM1时钟 RCC->APB2ENR|=1<<2; //PORTA时钟使能 GPIOA->CRH&=0XFFFF0FF0; //PORTA8 11复用输出GPIOA->CRH|=0X0000B00B; //PORTA8 11复用输出TIM1->ARR=arr; //设定计数器自动重装值 TIM1->PSC=psc; //预分频器不分频TIM1->CCMR2|=6<<12; //CH4 PWM1模式 TIM1->CCMR1|=6<<4; //CH1 PWM1模式 7<<4是PWM2模式TIM1->CCMR2|=1<<11; //CH4预装载使能 TIM1->CCMR1|=1<<3; //CH1预装载使能 TIM1->CCER|=1<<12; //CH4输出使能 TIM1->CCER|=1<<0; //CH1输出使能 TIM1->BDTR |= 1<<15; //TIM1必须要这句话才能输出PWM,MOE主输出使能TIM1->CR1=0x8000; //ARPE使能 TIM1->CR1|=0x01; //使能定时器1
}/在.h文件里
#ifndef __MOTOR_H
#define __MOTOR_H
#include <sys.h>
#define AIN1 PBout(12)
#define AIN2 PBout(13)
#define BIN1 PBout(14)
#define BIN2 PBout(15)
#define PWMA TIM1->CCR1 //赋值给PWMA就可以直接修改寄存器,发出不同PWM了
#define PWMB TIM1->CCR4 void MiniBalance_PWM_Init(u16 arr,u16 psc);
void MiniBalance_Motor_Init(void);
#endif//在main函数里
void main(void)
{Motor_Init();PWM_Init(7199,0);while(1){IN1=1;IN2=0;//左电机IN3=1;IN4=0;//右电机PWMA=4000;PWMB=4000;//直接操作寄存器,改变PWM}
}
记得,如果使用PWM了,就要把EN的帽子拔了。可以是库函数版也可以用寄存器版,我比较喜欢寄存器点,很直接。
**对了,还要注意这个PWM值不能为负值。**到这里,电机可以动了,随你发挥吧。