velodyne 16线如下图所示:
坐标x轴朝向正前方。

供电12V,数据通过网线传输,网线连接电脑。

velodyne默认IP是192.168.1.201,如果已修改,请牢记!这里展示的velodyne的IP已经修改为192.168.1.51。
在浏览器输入velodyne的IP,会弹出下面这个窗口,velodyne的外参可以在这里修改。

Network就是velodyne的IP,Host就是velodyne连接电脑之后,电脑的IP,需要设置成和上图一样。

在工作空间下git clone velodyne 的ROS驱动包:
git clone https://github.com/ros-drivers/velodyne.git
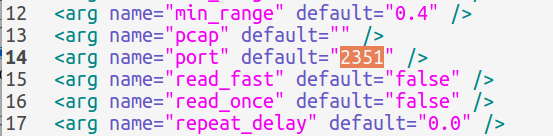
修改velodyne_pointcloud包下的VLP16_points.launch的内容,
默认的port是2368,需要根据velodyne的IP修改,这里我的修改为2351。
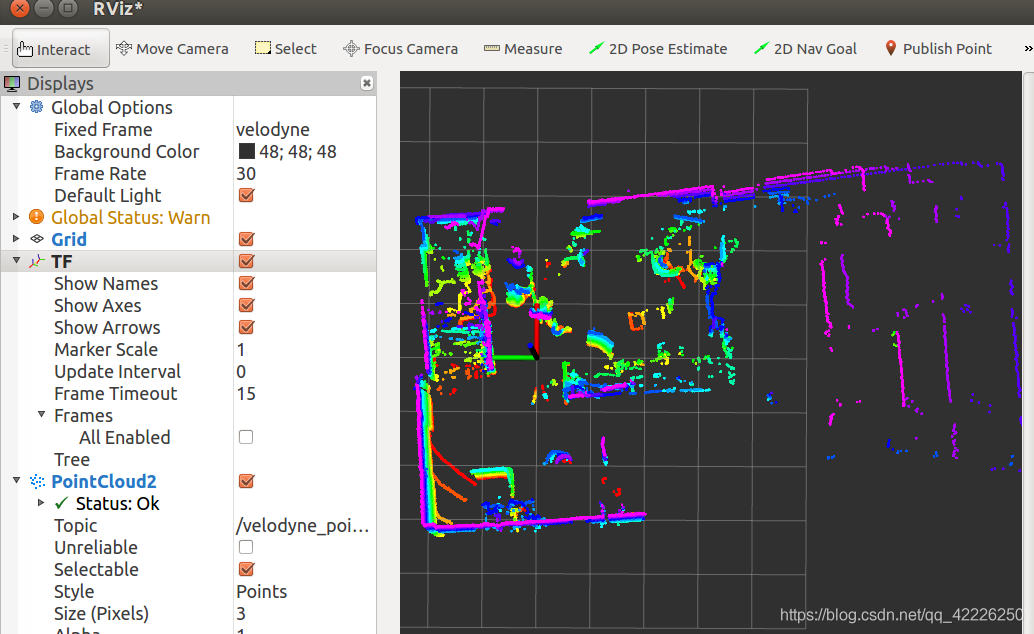
保存,编译,启动velodyne 驱动launch文件,启动rviz。
roslaunch velodyne_pointcloud VLP16_points.launch

设置Fixed Frame为velodyne,添加PointCloud2,设置正确的topic: /velodyne_points,rviz显示如下,velodyne工作正常。