Livox 激光雷达

ISAAC教程合集地址
文章目录
- Livox 激光雷达
- 支持的硬件和固件
- 在桌面上设置和运行示例应用程序
- 在机器人上设置和运行示例应用程序
- 查看正在运行的应用程序
- 将来
Livox 激光雷达
Isaac SDK 支持使用 Livox LIDAR,包括兼容的驱动程序和示例应用程序。
支持的硬件和固件
Isaac SDK 中包含的 Livox LIDAR 驱动程序支持 Livox Mid-40 并符合固件版本 03.04.0000。
在桌面上设置和运行示例应用程序
Isaac SDK 包含一个示例应用程序,演示了 Livox LIDAR 驱动程序和相关组件的用法。
要设置示例,请执行以下步骤:
-
打开 Livox LIDAR 并将其连接到主机 PC。
-
从以下网站下载并安装 Livox Viewer 工具:https://www.livoxtech.com/。
-
按照 Livox 快速入门说明将 LIDAR 配置为使用您选择的静态 IP 地址,例如 192.168.1.13。
-
按照 Livox 快速入门说明将 LIDAR 固件升级到版本 03.04.0000。
-
在示例应用程序配置文件 packages/livox/apps/livox_lidar_visualization/livox_lidar_visualization.app.json 中,更新 LIDAR 的 IP 地址。 在这个例子中:
"config": {"livox_lidar_mid-40": {"driver": {"device_ip": "192.168.1.13",
- 使用以下命令启动示例应用程序:
bob@desktop:~/isaac/sdk$ bazel run //packages/livox/apps/livox_lidar_visualization
应用程序开始正常运行并稳定下来。
在机器人上设置和运行示例应用程序
要在机器人上部署和运行示例应用程序,请执行以下步骤:
将 //packages/livox/apps/livox_livox_visualization:livox_livox_visualization-pkg 部署到机器人,如应用程序控制台选项中所述。
使用以下命令在机器人上运行示例应用程序:
bob@jetson:~/$ ./packages/livox/apps/livox_livox_visualization/livox_livox_visualization
查看正在运行的应用程序
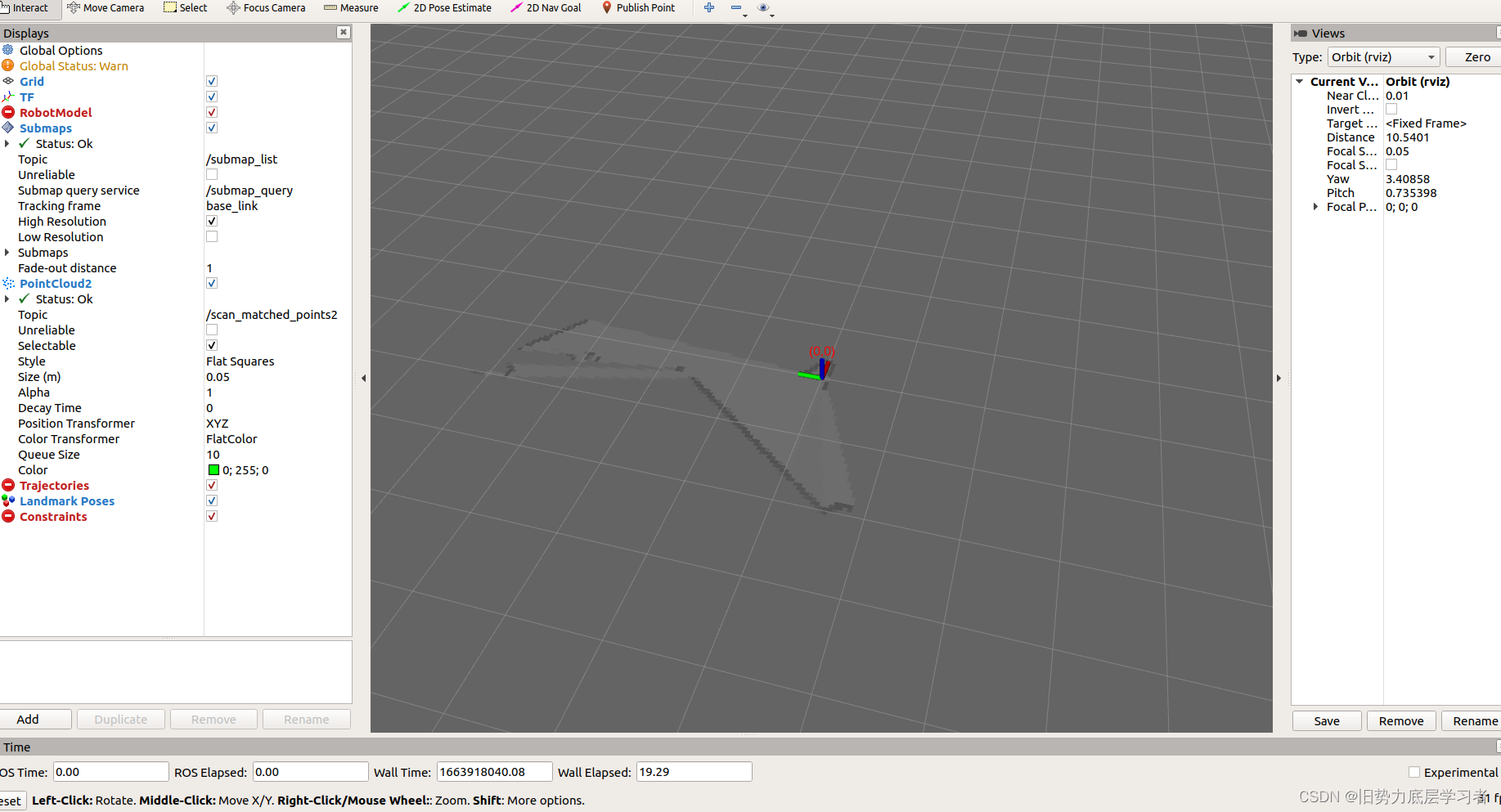
- 通过在桌面或机器人上运行 livox_LIDAR 应用程序,通过加载 localhost:3000 在 Web 浏览器中启动 Sight 应用程序。 随时间变化的点计数等指标以及显示的其他信息将类似于以下内容:

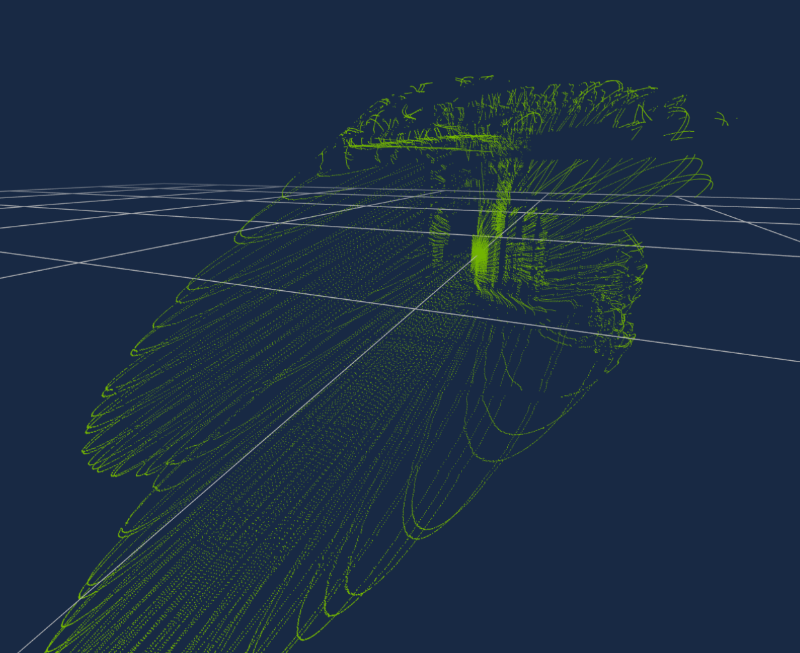
- 启用点云查看器以显示传入数据:
将来
Isaac SDK 中的 Livox LIDAR 是另一种可用于机器人应用程序的工具。 您的应用程序可能会集成 LIDAR 以用于导航、感知、深度或其他用途。
在下面的示例中,反射率信息在 10 秒的曝光时间段内传输到颜色通道中,用于累积云中总共一百万个点。

关于Livox LIDAR的更多详细信息,请访问以下网站:https://www.livoxtech.com/
更多精彩内容:
https://www.nvidia.cn/gtc-global/?ncid=ref-dev-876561