💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 文献来源
🌈4 Matlab代码、数据、文章讲解

💥1 概述
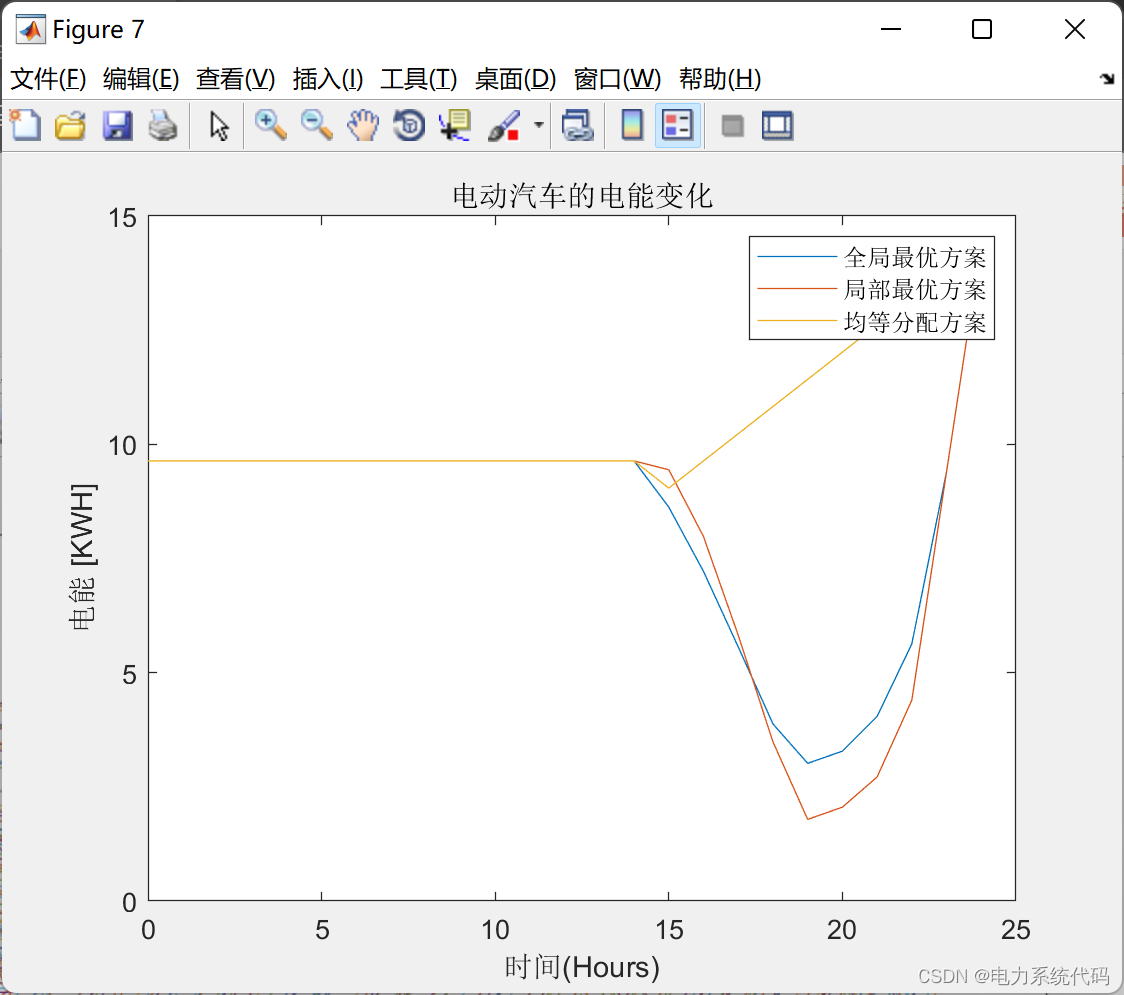
摘要:由于用电量的增加,车辆电气化将对电网产生重大影响。对电动汽车(EV)的充电和放电进行智能调度非常重要。然而,调度问题有两大挑战。首先,寻找能够最小化总成本的全局最优调度方案是一个挑战。其次,很难找到一个能够处理大量人口和电动汽车随机到达的分布式调度方案。本文提出了电动汽车充放电的全局最优调度方案和局部最优调度方案。我们首先提出了一个全局调度优化问题,其中对充电功率进行优化,以最小化白天进行充电和放电的所有电动汽车的总成本。全局最优解决方案提供了全局最小的总成本。然而,全局最优调度方案是不切实际的,因为它需要有关未来基本负载和到达时间的信息,以及将在一天的未来时间到达的电动汽车的充电周期。为了开发一个实用的调度方案,我们然后制定了一个局部调度优化问题,该问题旨在最小化本地组中当前正在进行的EV组中的EV的总成本。局部最优调度方案不仅可扩展到大型电动汽车群体,而且对动态电动汽车到达具有弹性。通过仿真,我们证明了与全局最优调度方案相比,局部最优调度方案可以获得接近的性能。
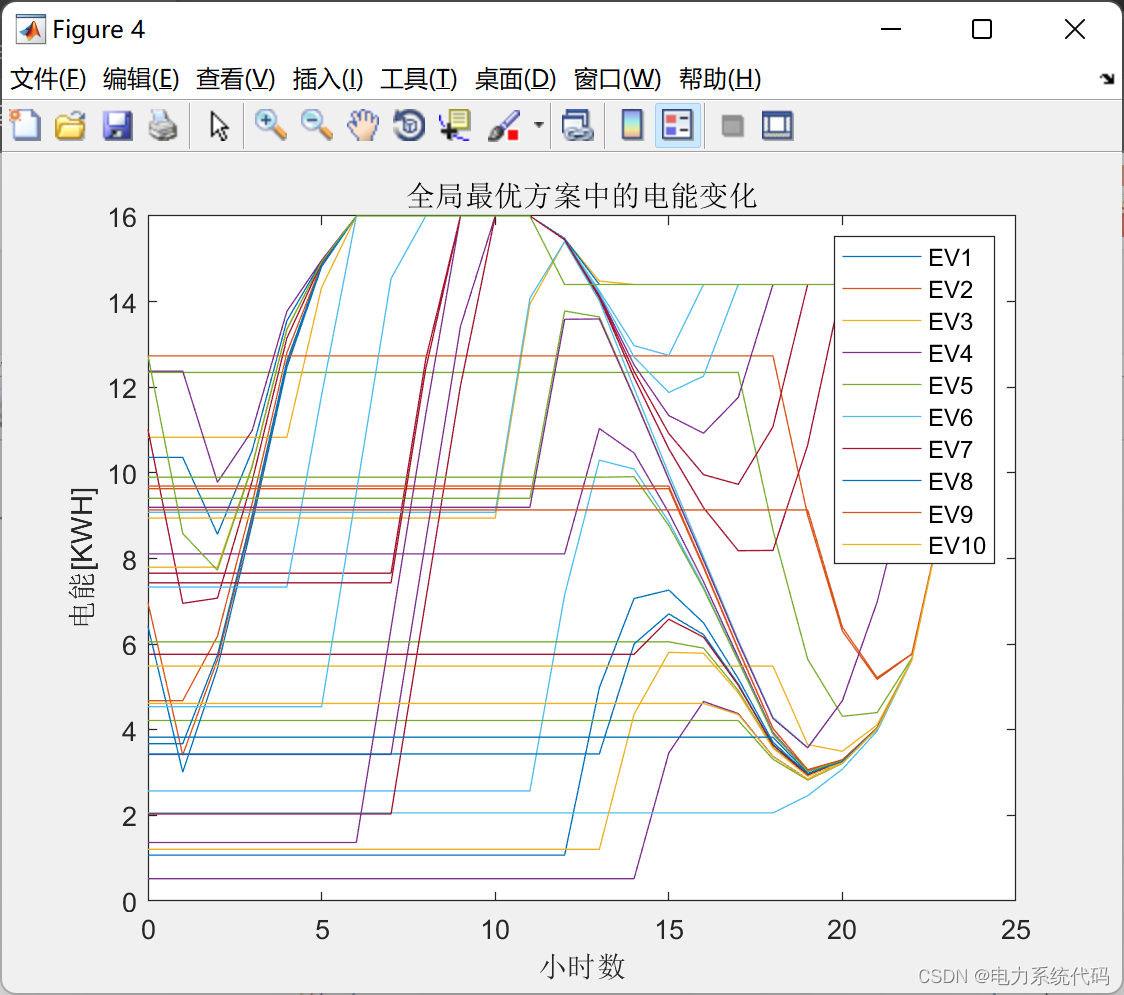
在全局最优调度方案中,由于我们假设我们具有关于一天内的电动汽车和基本负载的信息的全局知识,因此我们可以通过仅解决一次全局调度优化问题(5)来找到每个间隔的最优充电功率。在局部最优调度方案中,我们不知道未来负载和未来EV的信息。我们提出了一种局部最优调度方案,通过使用滑动窗口机制来找到本地电动汽车在下一个间隔内的最优充电功率
在局部最优调度方案中,我们基于组进行调度优化。一组EV包括位于一个位置或多个附近位置的EV。例如,在停车场进行充电和放电的电动汽车可以被分类为一组,而住宅车库中的电动汽车可被分类为另一组。每个组都有一个本地控制器(LC)。局部最优调度方案中的通信和控制如图2所示。本地控制器与位于公用事业公司的中央控制器和本地站点的充电站建立通信连接。本地控制器从中央控制器接收当天的预测负荷。本地控制器与每个充电站实时通信以收集EV信息,基于该信息执行调度优化,然后指示每个本地EV以最佳充电功率对电池进行充电或放电。

安装CVX包:
先点击这里:风电随机性动态经济调度模型
然后:也是代码前的准备
本文是一种最优调度算法,以最大限度地降低电动汽车充放电的总成本。
📚2 运行结果






| 模拟大规模电动车充电行为(Matlab实现) |
| 电动汽车对系统运行的影响(Matlab实现) |
| 基于蒙特卡洛法的规模化电动汽车充电负荷预测(Python&Matlab实现) |
| 基于电动汽车的带时间窗的路径优化(Python&Matlab代码实现) |
| (Matlab实现)基于蒙特卡诺和拉格朗日乘子法的电动车调度【有序、无序充放电】 |
部分代码:
%===简单乘法计算=====
% k_con=alfa/(omega^theta*(theta+1));
%=====充电间隔时间======
tau=1; % 小时内
%=====充电间隔数========
num_slot=length(L_b_mic);
%====(2)基本价格=======
price_basic=zeros(num_slot,1); % 基于基本负荷的价格
for i=1:num_slot
price_basic(i)=k_0+k_1* L_b_mic(i);
end
fprintf('价格,最低价格=%g,最高价格=%g.\n',min(price_basic), max(price_basic));
%% 电动汽车EV容量
Cap_battery_org=16; % KWh
gamma=0.9; % 充电完成时电池的百分比
Cap_battery=gamma*Cap_battery_org;
%% ==最大充电率===
P_max=5; % KW
%% 电动汽车数量
num_EV=200;
% 仅给电池充电的电动汽车的百分比
P_Chg=0;
% CHG EVs数量
num_CHG_EV=round(P_Chg*num_EV); % CHG EV 将位于 EV 信息矩阵的前面部分。
% V2G EVs数量
num_V2G_EV=num_EV-num_CHG_EV;
%% 电动汽车充电模式
% 30% 的电动汽车在间隔 1 之前连接到充电站,其余的均匀分布
%EV矩阵:1) 到达时间,2) 出发时间,3) 初始能量,4) 充电周期,5) 最小充电时间%
% EV_info=zeros(num_EV,3);
%===间隔1前接入站的EVS百分比====
% Per_EV=0.1;
%=====其他车辆到达时间均匀分布在[ 1,20 ]之间======
% for i=1:num_EV
% temp_00=rand;
% if temp_00<=Per_EV
% T_arrival(i,1)=1;
% else
% T_arrival(i,1)=round(1 + (20-1).*rand);
% end
% end
%
%=====充电时间均匀分布在 [4, 12] 小时之间======
% T_charging= round(4 + (12-4).*rand(num_EV,1));
% T_charging=-1*sort(-1*T_charging);
%
% % the departure time
% for i=1:num_EV
% T_departure(i,1)=min(24, T_arrival(i,1)+T_charging(i,1));
% end
%====初始电量均匀分布在电池容量的[0 0.8]之间======
% Ini_percentage=0+ (0.8-0).*rand(num_EV,1);
% % fill the EV_info
% EV_info(:,1)=T_arrival;
% EV_info(:,2)=T_departure;
% EV_info(:,3)=Cap_battery_org*Ini_percentage;
%
% for i=1:num_EV
% EV_info(i,4)=EV_info(i,2)-EV_info(i,1)+1; % 充电周期
% EV_info(i,5)=EV_info(i,3)/P_max; % 最小充电时间
% if EV_info(i,4) < EV_info(i,5)
% fprintf('EV %g 充电时间不合理.\n',i);
% end
% end
%
% % save and load EV_info
% save EV_info.txt EV_info -ascii;
load EV_info.txt;
EV_info=EV_info(1:num_EV,:);
%% 电动汽车与充电间隔的关系
F=zeros(num_EV, num_slot);
G=ones(num_EV, num_slot);
for i=1:num_EV
for j=EV_info(i,1):EV_info(i,2)
F(i,j)=1;
G(i,j)=0;
end
end
F1=reshape(F',1,[]);
% F=ones(num_EV, num_slot);
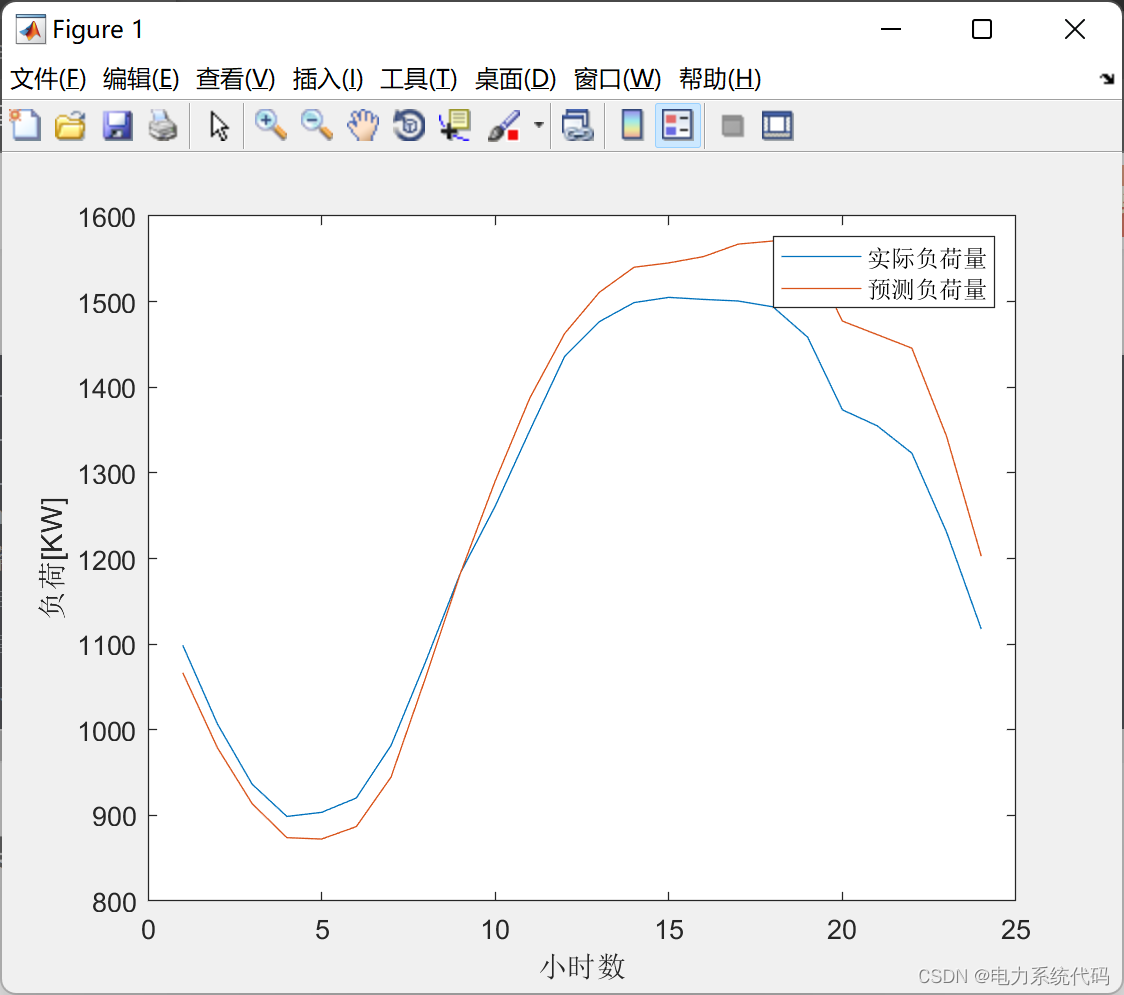
%% 绘制基本负荷
xx_1=1:num_slot;
figure;
yy_1(:,1)=L_b_mic;
yy_1(:,2)=P_L_b_mic;
plot(xx_1,yy_1);
ylabel('负荷[KW]');
xlabel('小时数');
legend('实际负荷量','预测负荷量');
%% 使用CVX工具的V2G全局最优方案
%(1)等式约束: Ax=b
% (2)优化变量x=[z1, z2, ..., z_24, x11, x12, ...., x_100,24]'
num_OptVar=1*num_slot+num_slot*num_EV;
b_a=L_b_mic; %第一个等式约束的矩阵
A1_a=zeros(num_slot, num_OptVar-1*num_slot);
A1=[eye(num_slot) A1_a];
A2_a=zeros(num_slot, num_OptVar-1*num_slot);
s_temp=0;
for i=1:num_slot
for j=1:num_EV
A2_a(i, (j-1)*num_slot+i)=F(j,i);
% fprintf('Assign F(%g,%g)=%g, to A2_a(%g, %g).\n',j,i,F(j,i),i,(j-1)*num_slot+1);
s_temp=s_temp+F(j,i);
end
end
A2_b=zeros(num_slot, num_slot);
A2=[A2_b A2_a];
A_a=A1-A2; % 第一个等式约束的矩阵
clear A1 A2 A1_a A2_a A2_b;
%======第一个等式约束的矩阵=====
B_1=zeros(num_EV, num_OptVar-1*num_slot);
for i=1:num_EV
B_1(i,(i-1)*num_slot+1:(i-1)*num_slot+num_slot)=F(i,:);
end
temp_1=zeros(num_EV, num_slot);
B1=[temp_1 B_1]; % 第二等式约束的矩阵
b_b=(Cap_battery/tau)*ones(num_EV,1)-EV_info(:,3);% 第二等式约束的矩阵
clear B_1 temp_1;
%合并等式矩阵
% Eq_left=[A_a' B1']';
% Eq_right=[b_a' b_b']';
%% ======等式约束=====
Eq_L=A_a;
Eq_R=b_a;
clear A_a b_a;
%% ======不等式约束=====
% ====1)第一个不等式约束=====
In_1=zeros(num_EV*num_slot, num_OptVar);
for i=1:num_slot
for j=1:num_EV
In_1((i-1)*num_EV+j,num_slot+(j-1)*num_slot+1:num_slot+(j-1)*num_slot+i)=F(j,1:i);
% fprintf('set row %g, col %g:%g by using F(%g,1:%g).\n',(i-1)*num_EV+j,num_slot+(j-1)*num_slot+1,num_slot+(j-1)*num_slot+i,j,i);
end
end
In_1=-1*In_1; % 第一个不等式,左边
In_b1=zeros(num_EV*num_slot, 1); % 第一个不等式,右边, [EV1_slot1, EV2_slot1, ..., EV1_slot2, EV2_slot2,...]'
for i=1:num_slot
In_b1( (i-1)*num_EV+1:(i-1)*num_EV+num_EV, 1 )= (1/tau)*EV_info(1:num_EV,3);
end
%=====2)第二个不等式约束=====
In_2=-1*In_1; %第二个不等式约束,左边
In_b2=zeros(num_EV*num_slot, 1); % 第二个不等式约束,右边, [EV1_slot1, EV2_slot1, ..., EV1_slot2, EV2_slot2,...]'
temp_b2=Cap_battery_org - EV_info(1:num_EV,3);
for i=1:num_slot
In_b2( (i-1)*num_EV+1:(i-1)*num_EV+num_EV, 1 )= (1/tau)*temp_b2;
🎉3 文献来源
部分理论来源于网络,如有侵权请联系删除。