调整了伺服的速度环、位置环之后,遇到一个问题是直线电机高速的时候移动顺滑,但是低速的时候会出现抖动的情况,要进一步提高伺服运动的性能,还需要进一步优化PDI参数,本文补充几个优化PDI参数的方面。
- 操作流程
1.1. 调整的速度环位置环如下
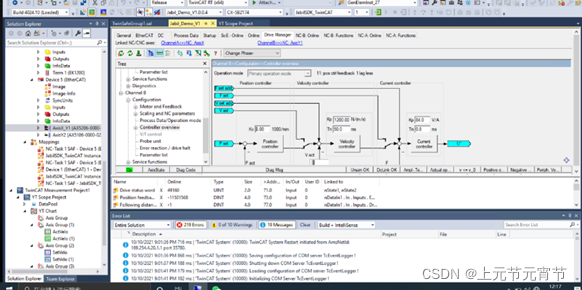
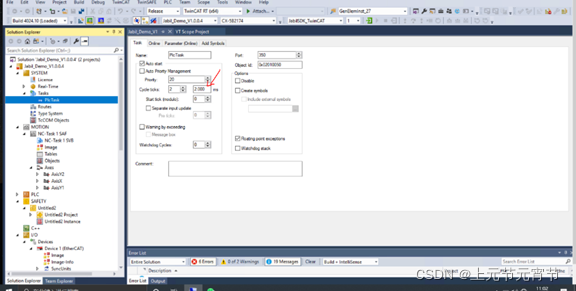
1.2. 把PLC的任务周期适当减少
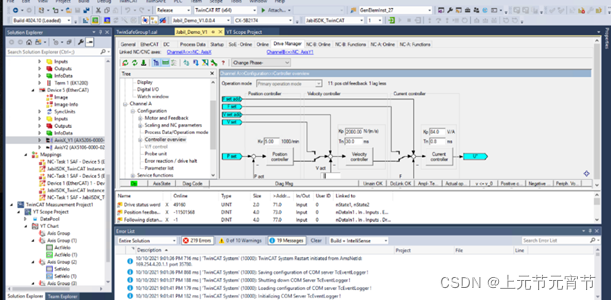
1.3. Velocity filter
低通时间加大到0.2,原来是0.125
调整了伺服的速度环、位置环之后,遇到一个问题是直线电机高速的时候移动顺滑,但是低速的时候会出现抖动的情况,要进一步提高伺服运动的性能,还需要进一步优化PDI参数,本文补充几个优化PDI参数的方面。
1.2. 把PLC的任务周期适当减少
1.3. Velocity filter
低通时间加大到0.2,原来是0.125