写在前面:
由于时间的不足与学习的碎片化,写博客变得有些奢侈。
但是对于记录学习(忘了以后能快速复习)的渴望一天天变得强烈。
既然如此
不如以天为单位,以时间为顺序,仅仅将博客当做一个知识学习的目录,记录笔者认为最通俗、最有帮助的资料,并尽量总结几句话指明本质,以便于日后搜索起来更加容易。
标题的结构如下:“类型”:“知识点”——“简短的解释”
部分内容由于保密协议无法上传。
点击此处进入学习日记的总目录
2023.06.06
- 一、元件:SIM7020C——无线通信模块
- 二、元件:BMI088——高精度姿态传感器
- 三、元件:MAX-M8Q-10A——GNSS 模块
- 四、元件:KH-MMCX-Z——MCX/MMCX 内孔
- 五、元件:SN74LVC1T45DBVR——单位双电源总线收发器
- 六、元件:自弹式 MicroSIM卡卡座
一、元件:SIM7020C——无线通信模块
- 元件介绍
SIM7020C是一款多频段NB-IoT无线通信模块,模块采用42 PIN LCC封装。SIM7020C拥有丰富的硬件接口,包括串口,GPIO,ADC等,这也使得模块具备丰富的扩展性,为用户的产品开发提供了极大的便利性。SIM7020C的封装和SIM800C模块兼容,可以尽可能缩短客户研发时间,加快客户产品投放市场的速度。SIM7020C模块是低延迟、低功耗、低吞吐量应用的最优解决方案,非常适用于如表计、远程控制、资产跟踪、远程监控、远程医疗、共享单车等物联网应用。
- 优点:
- 低功耗:模块支持
PSM和eDRX低功耗模式,理论上两节5号电池可支持10年。 - 广覆盖:相比较
GSM,NB-IoT有很强增益,信号覆盖很广,这也使得产品在类似地下室之类的位置具备无线通讯能力。 - 支持用户平滑升级:模块封装兼容
SIM800C模块,方便用户平滑升级。
PSM模式
- 产品详情

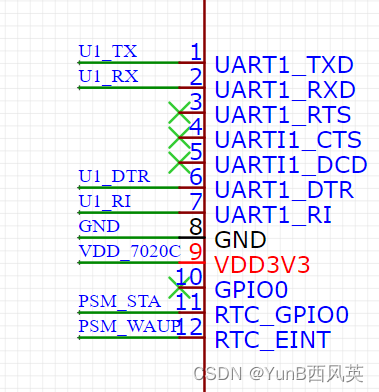
- 引脚
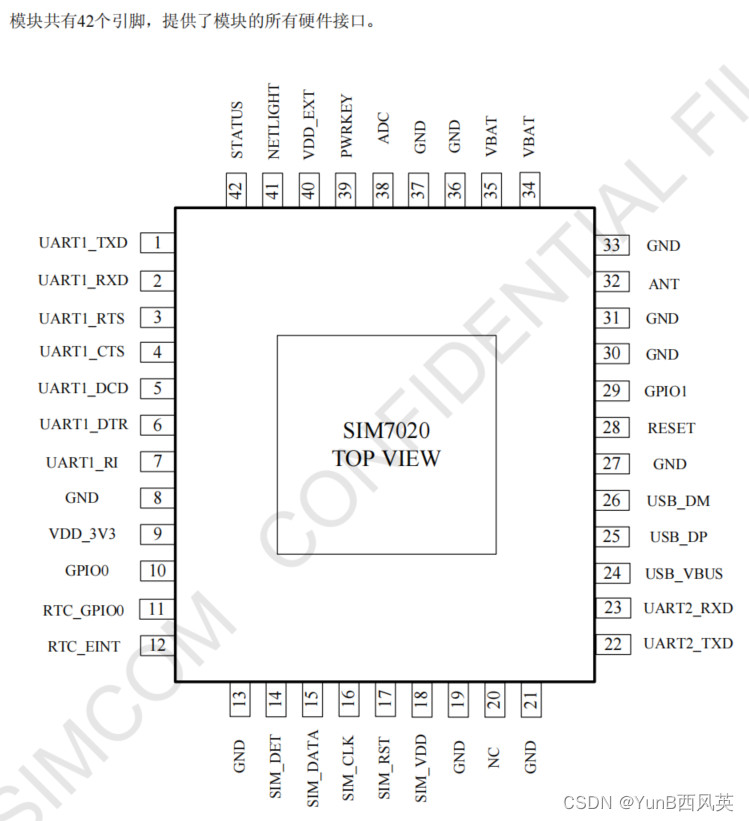

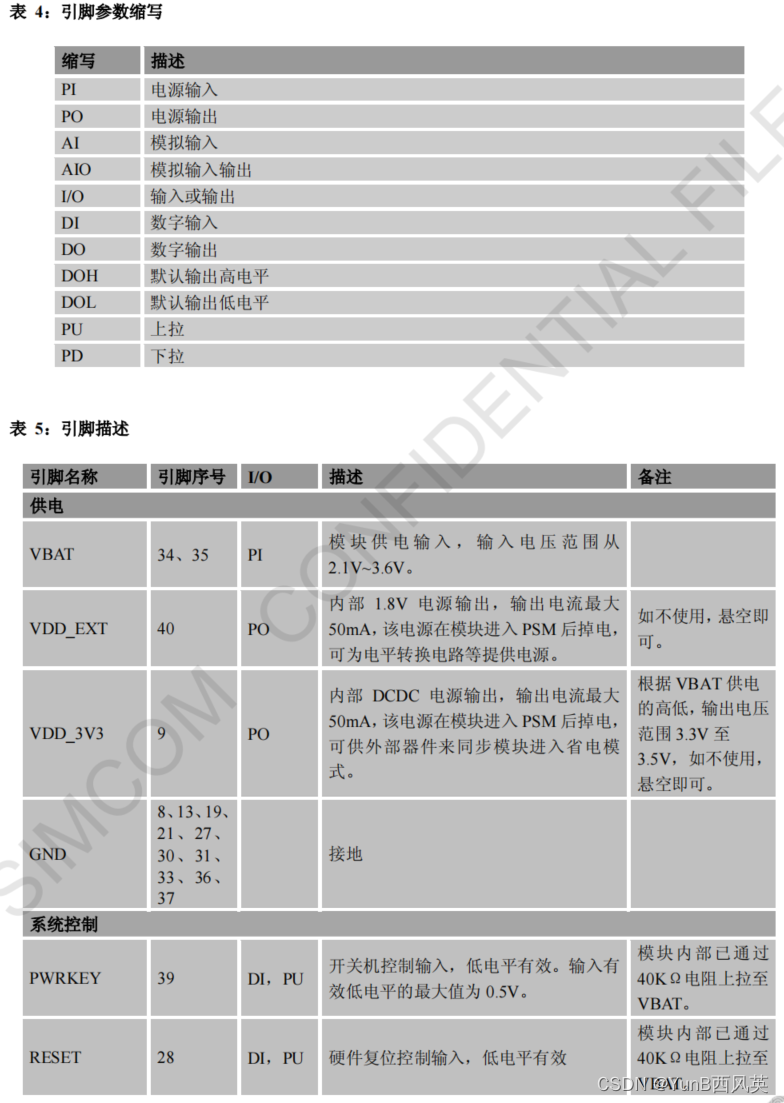
供电接口中,VBAT连接稳压3.3V,VDD_EXT连接电平转换电路,VDD_3V3给板子供电(进入PSM模式后掉电)
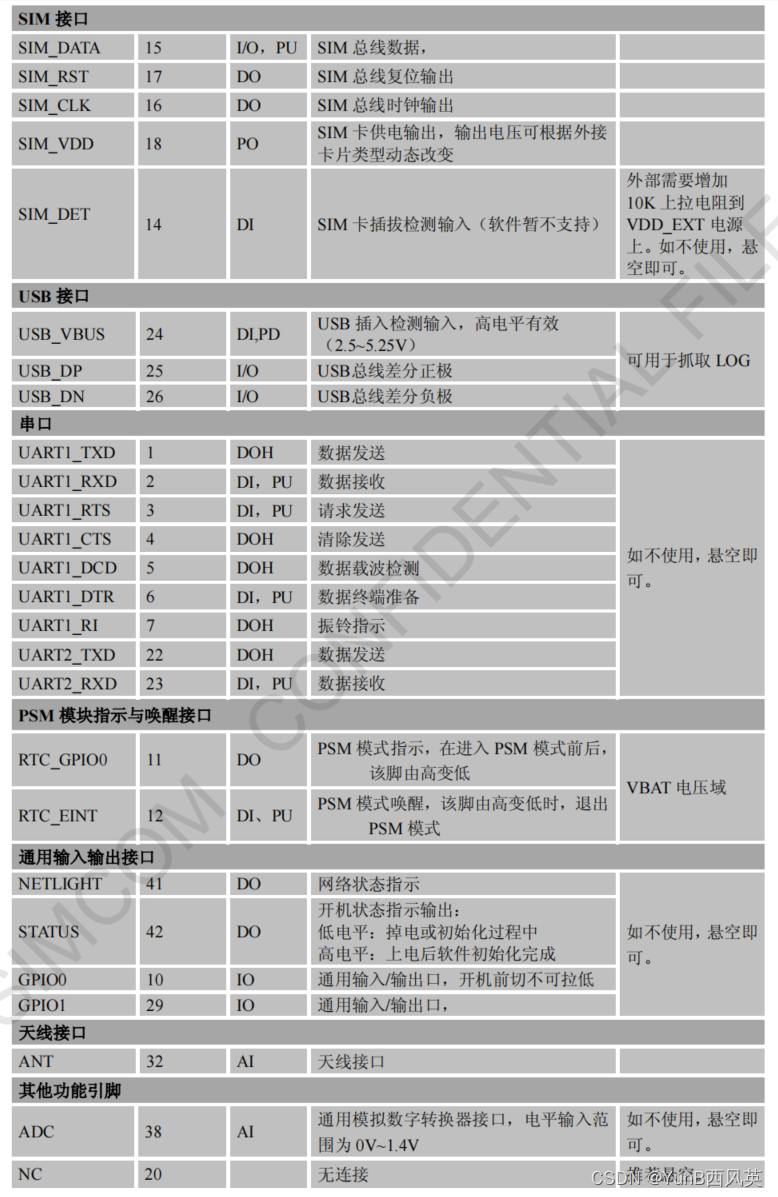
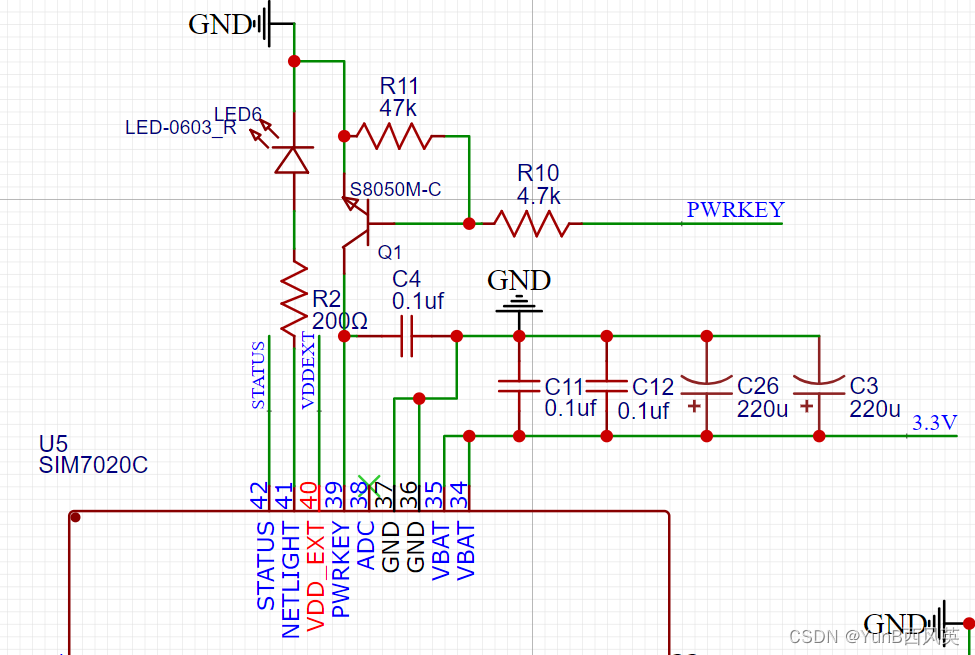
VBAT通过四个电容滤波(两个极性,两个无极性)
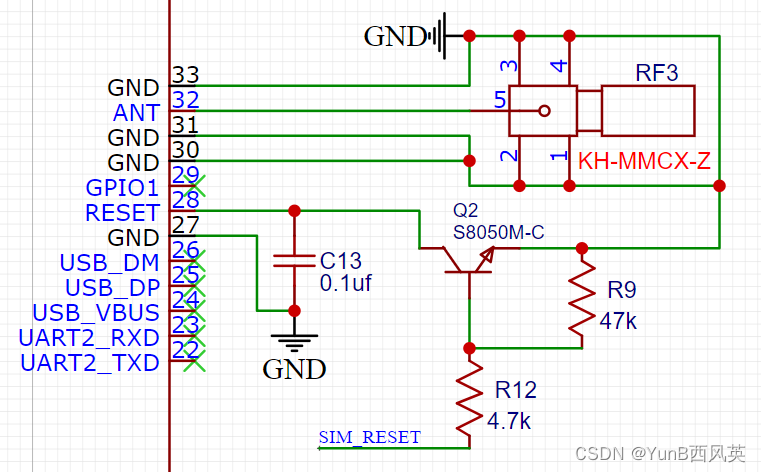
复位引脚通过一个二极管被微处理器控制
参考资料:
SIM7020C
NB-IOT模组
PSM模式
通信模块——SIM7020
二、元件:BMI088——高精度姿态传感器
-
元件介绍
博世Sensortec BMI088是一款高性能六轴惯性测量单元(IMU),具有高振动稳定性,专为无人机和机器人应用而设计。BMI088专门设计用于有效抑制由于PCB上的共振或整个系统的结构而可能发生的振动。除了高振动稳健性外,BMI088卓越的温度稳定性有助于提高估算滤波器性能,IMU具有极宽的24G加速度计范围。
BMI088是一种系统级封装(SiP),将加速度计和陀螺仪组合到一个封装中。BMI088支持高达400kHz的I2C和高达10MHz的SPI通信。加速度计和陀螺仪可以单独访问,也可以同步输出数据。BMI088还具有可编程满量程范围、输出数据速率和中断。
-
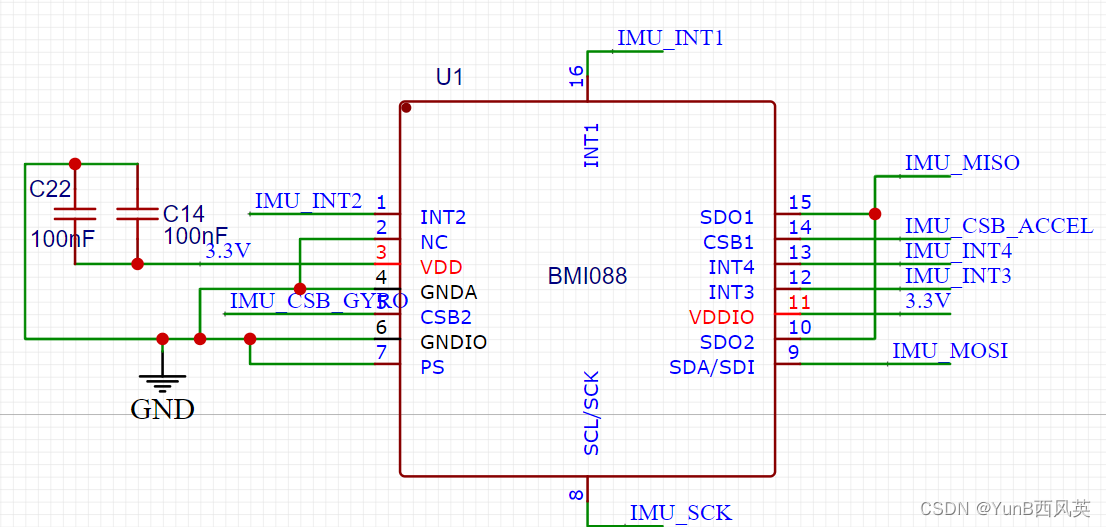
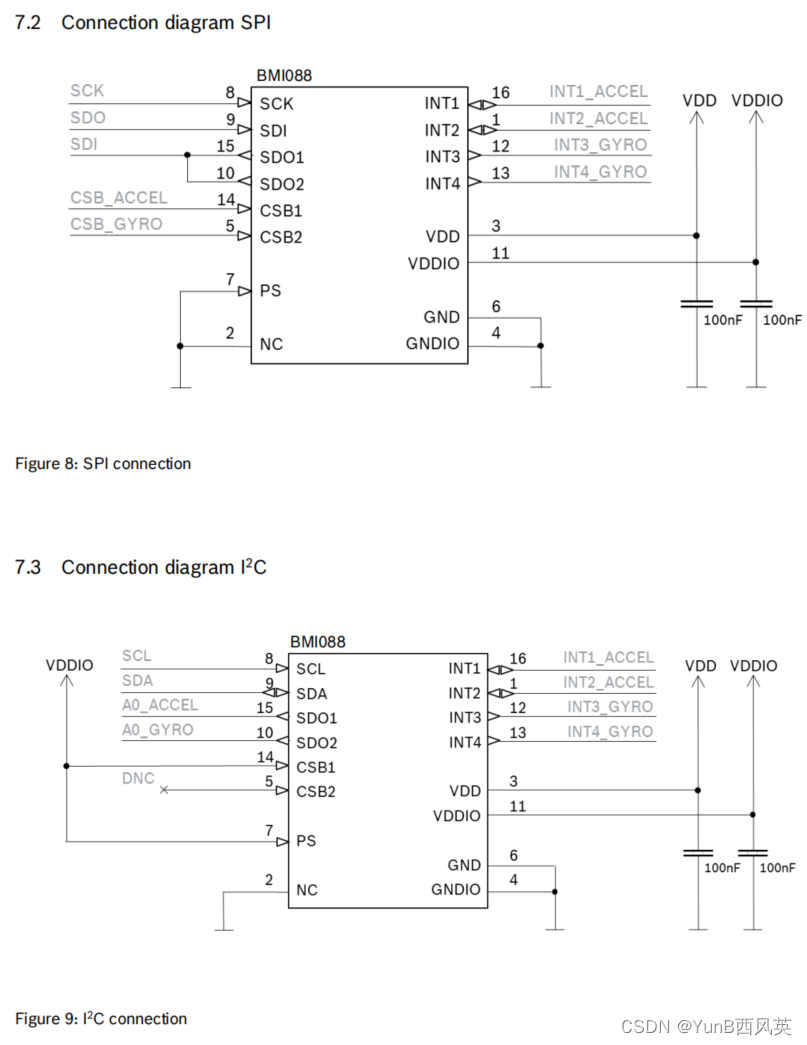
传感器原理图
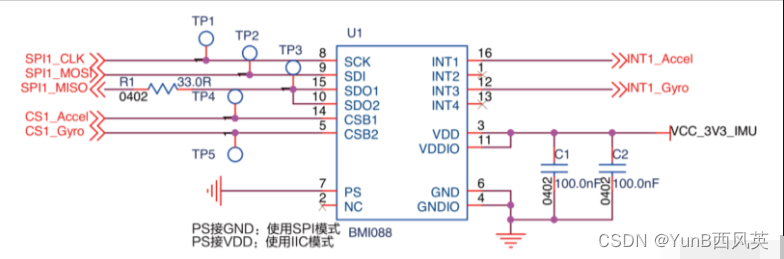
传感器采用3.3V供电,使用SPI/IIC通讯模式。
-
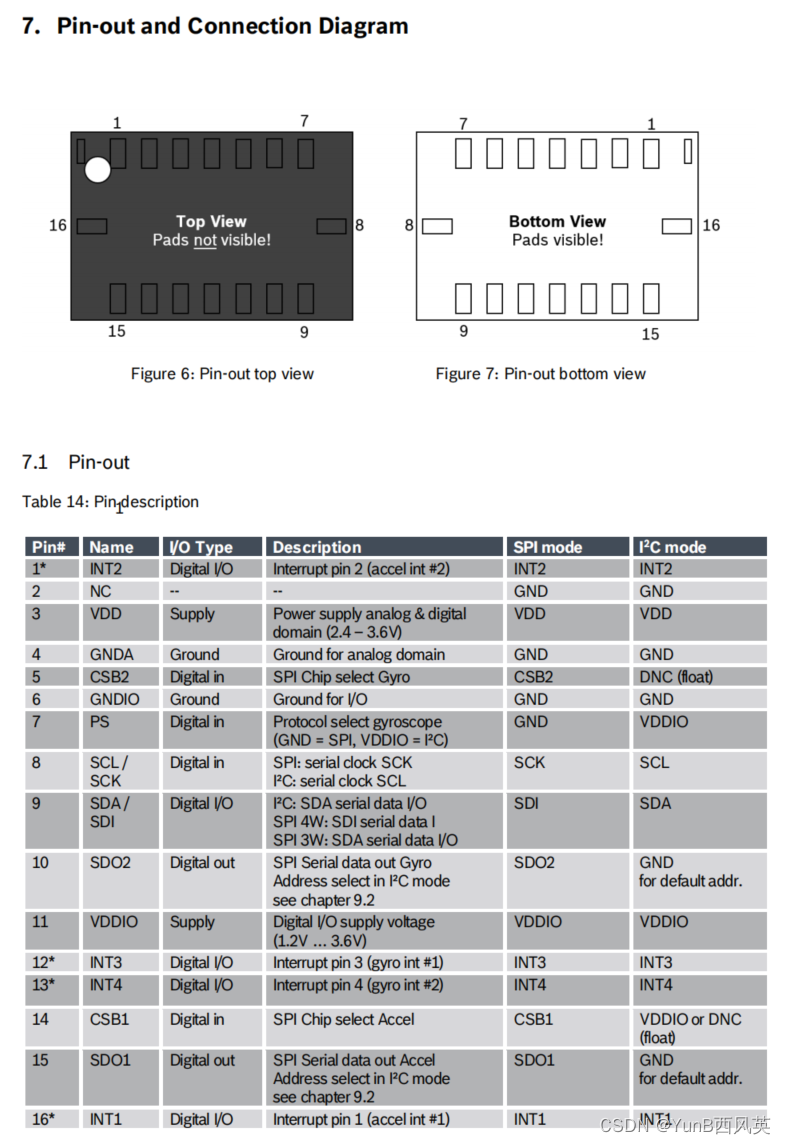
引脚
-
传感器功能介绍

这里提到的数据读取频率 2000Hz是陀螺仪的数据最快读取频率,其加速度计的数据最快读取频率为1600Hz。
加速度测量单位g为重力加速度,陀螺仪测量单位°/s为角度单位,这里注意角度制和弧度制的区别,三角函数使用的是弧度制。 -
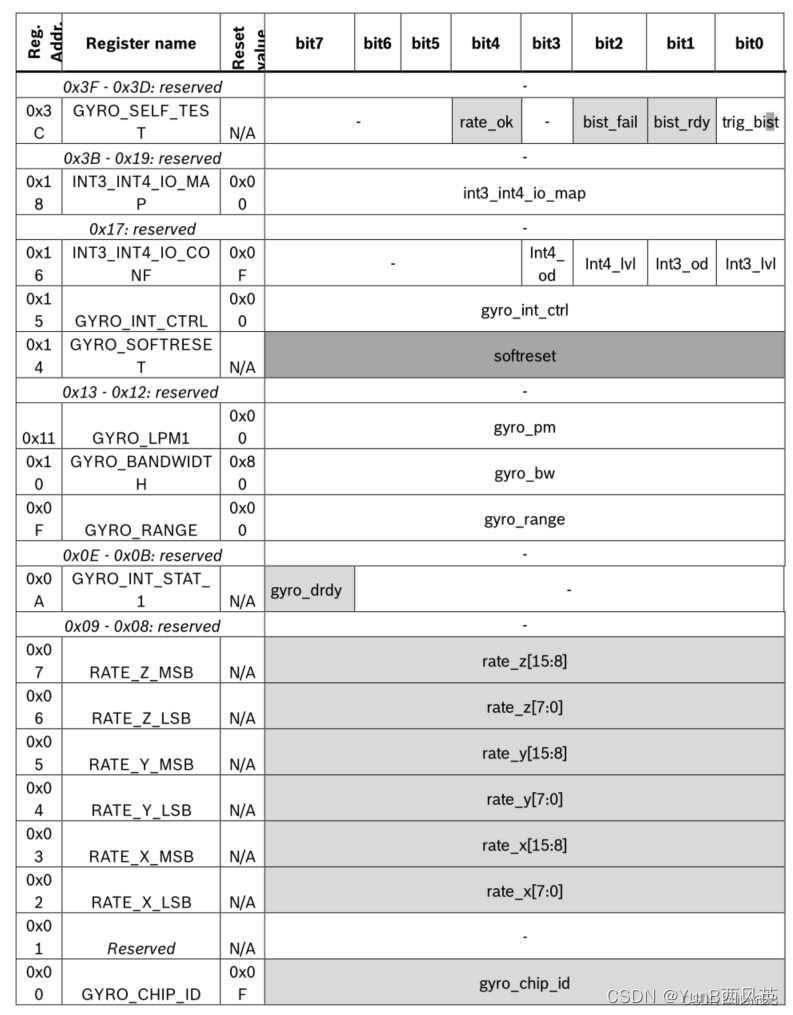
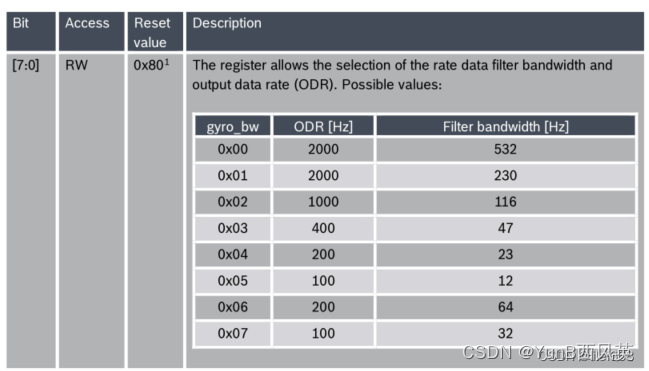
陀螺仪传感器内部寄存器对照表:
-
加速度传感器内部寄存器对照表:
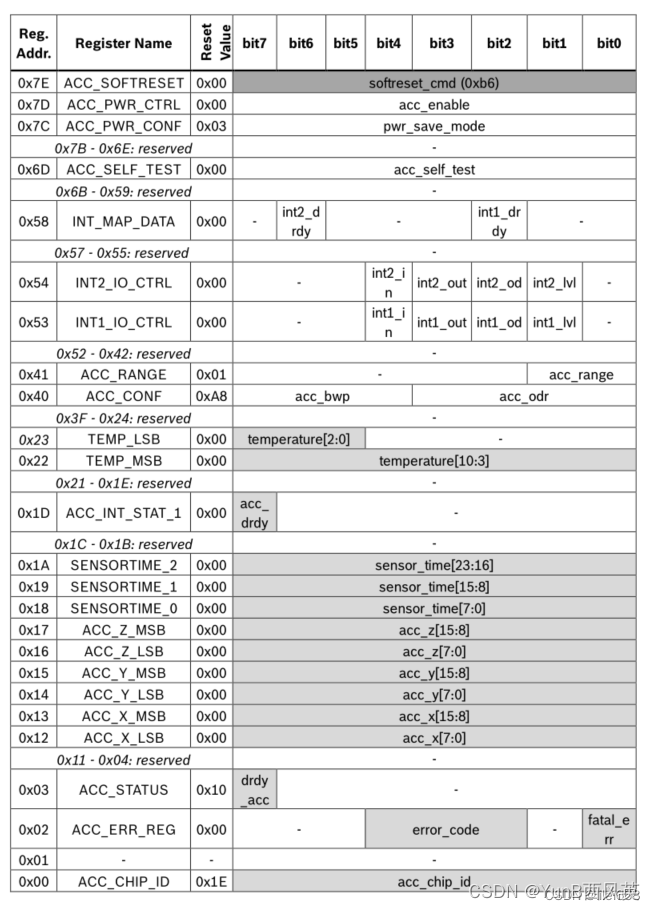
BMI088作为一款成熟的惯性器件,可以读取传感器当前工作温度,但是温度传感器挂载与加速度计部分,这也就是说如果准备做温度补偿,需要在读取加速度计数据的同时读取温度数据。 -
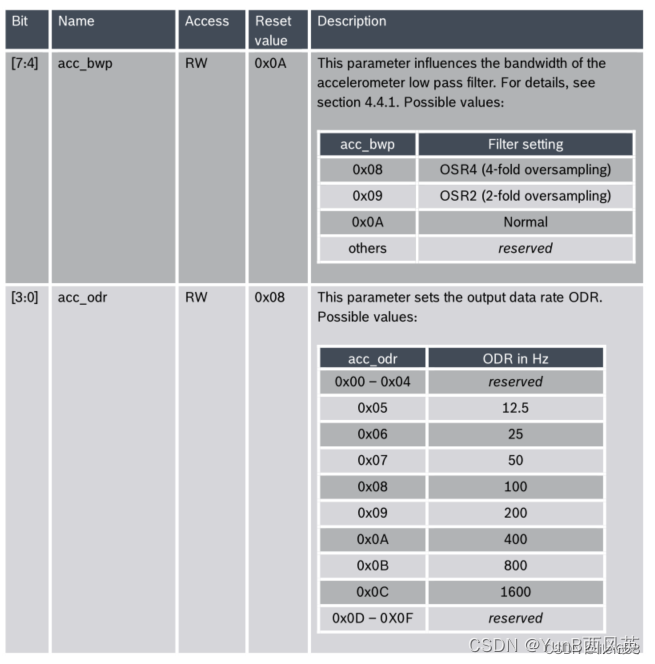
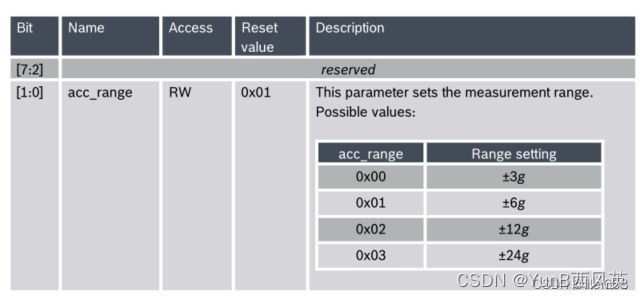
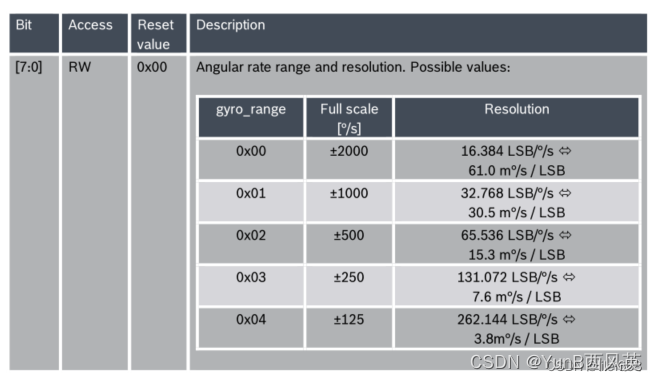
数据读取模式选择:读取频率、数据范围、以及滤波带宽的选择:
加速度计部分:
陀螺仪部分:
参考资料
高精度BMI088姿态传感器
陀螺仪数据处理(BMI088)(含程序)
BMI088
BMI088数据读取
三、元件:MAX-M8Q-10A——GNSS 模块
- 元件介绍
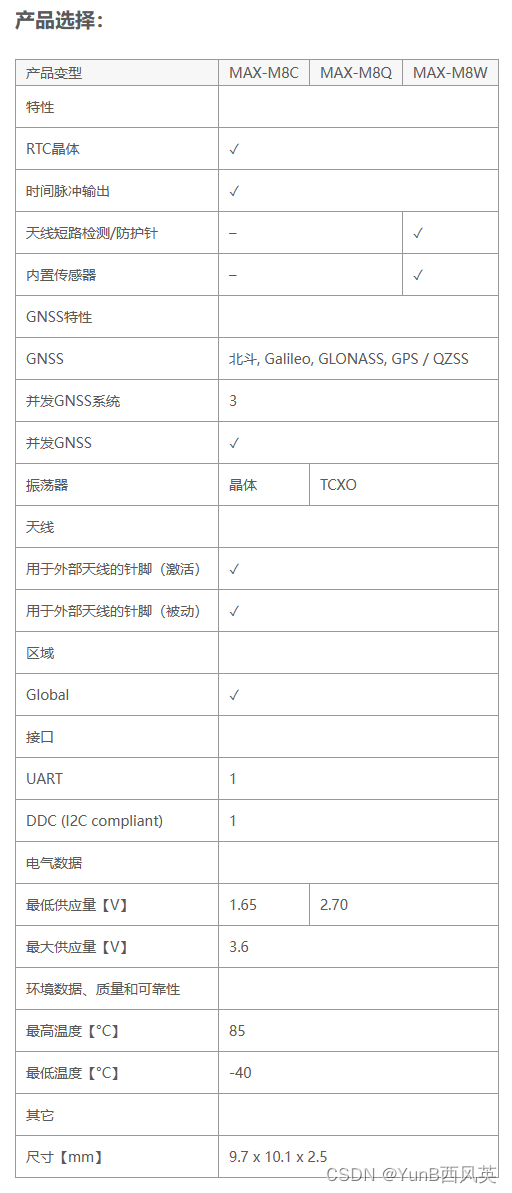
- 易于制造的小型 GNSS 模块
- 同时接收 3 个 GNSS 系统(GPS、Galileo、GLONASS、北斗)的信号
- 行业领先的 –167 dBm 导航灵敏度
- 多种产品型号,确保满足不同的性能和成本要求
- 微型 LCC 封装
- 卓越的反欺骗和抗干扰能力
- 与 MAX-7 和 MAX-6 引脚兼容
独立式并发GNSS模块中的MAX-M8系列采用业界认可的MAX外形尺寸,具有u-blox M8引擎的卓越性能。
u-blox M8并发GNSS引擎借助双频射频前端,可智能使用来自两个GNSS(GPS、GLONASS和北斗)系统的大量可见卫星,以进行可靠定位。对于注重性能的应用来说,MAX-M8系列是理想的选择。
MAX-M8系列具有高度的灵敏性,采集时间短,同时可使系统保持低功耗。经优化的MAX‑M8C适用于成本敏感型应用,具有极低的功耗。
MAX-M8Q 可为有源和无源天线设计提供最佳性能;而经过优化MAX-M8W,凭借其卓越性能,是有源天线的理想之选。
采用业内认可的MAX外形尺寸,可轻松从之前的MAX系列产品中进行迁移。即使是在不利于GNSS的环境中,其精密的射频架构及干扰抑制功能可确保具有最佳的性能。
MAX‑M8模块采用微型封装,不仅具有高度的集成功能,还具有灵活的连接选项。对于具有严格尺寸和成本要求的工业应用来说,它是理想的选择。
MAX-M8Q采用无卤(绿色)设计,是客户应用的理想选择。
DDC(I2C兼容) 接口可供连接,并可与绝大多数的u-blox蜂窝模块实现协同作用。u-blox M8模块采用符合AEC-Q100标准的GNSS芯片,在经ISO/TS 16949认证的工厂中制造,并对系统进行了全面测试。

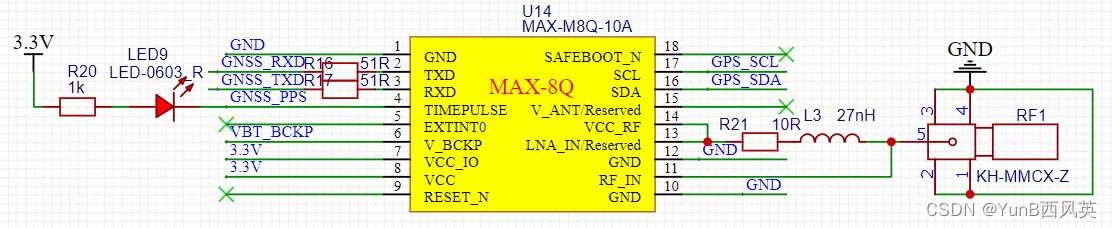
2. 原理图 与 封装
参考资料
MAX-M8 系列(文档下载)
MAX-M8Q-10A
MAX-M8 系列 小型 u-blox M8 GNSS 模块
Ublox-MAX-M8接收机配置和协议的获取
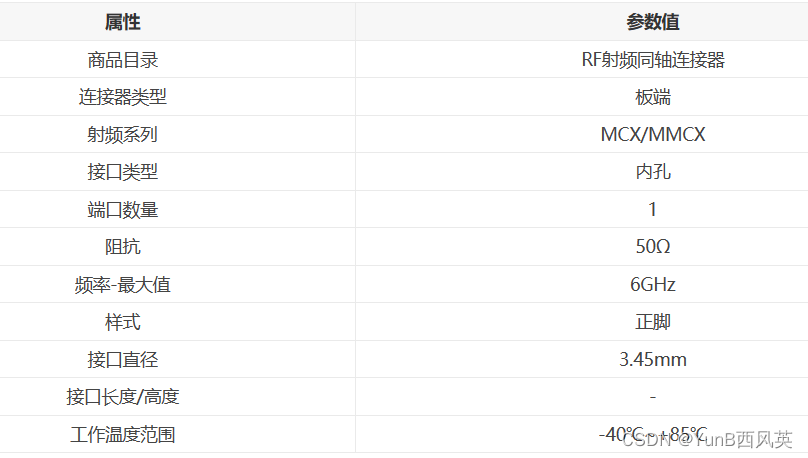
四、元件:KH-MMCX-Z——MCX/MMCX 内孔
- 元件介绍
参考资料
MCX/MMCX 内孔 正脚 镀金
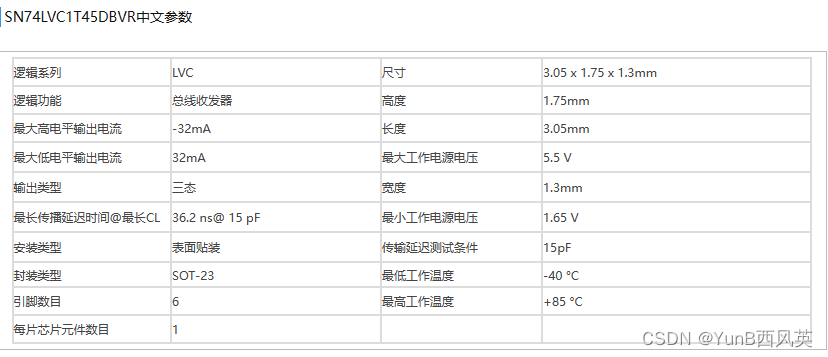
五、元件:SN74LVC1T45DBVR——单位双电源总线收发器
- 元件介绍
SN74LVC1T45DBVR是一款单位双电源总线收发器,具有可配置电压转换和三态输出.这款单位非反相总线收发器使用两个独立的可配置电源轨.A端口旨在追踪VCCA.VCCA接受1.65至5.5V电源电压.B端口旨在追踪VCCB.VCCB接受1.65至5.5V电源电压.这允许通用低电压双向转换,包括1.8,2.5,3.3和5V电压节点之间.设计用于两条数据总线之间的异步通信.方向控制(DIR)输入的逻辑电平启用B端口输出或A端口输出.当B端口输出启用时,设备从A总线传输数据到B总线,当A端口输出启用时,设备从B总线传输数据到A总线.A与B端口上的输入电路始终处于活动状态,并且必须施加逻辑高电平或低电平以防止过高ICC与ICCZ.
- 端口可在全1.65至5.5V电源范围内工作
- VCC隔离功能
- DIR输入电路参考VCCA
- 低功耗,最大ICC为4A
- 3.3V时,±24mA输出驱动
- Ioff支持部分关断模式运行
- 420,210,140和75Mbps最大数据速率
- 闭锁性能超过100mA,JESD 78,Class II
-
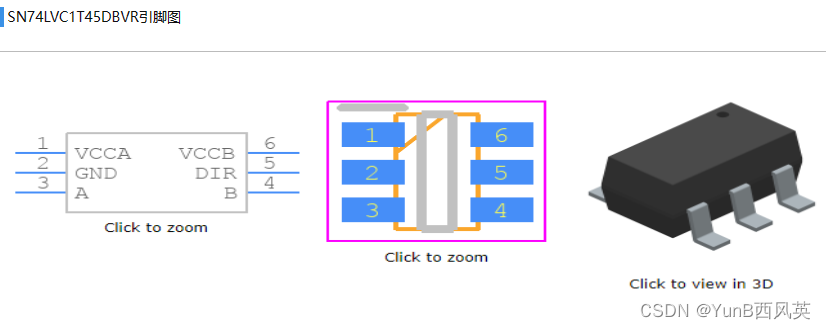
引脚图
-
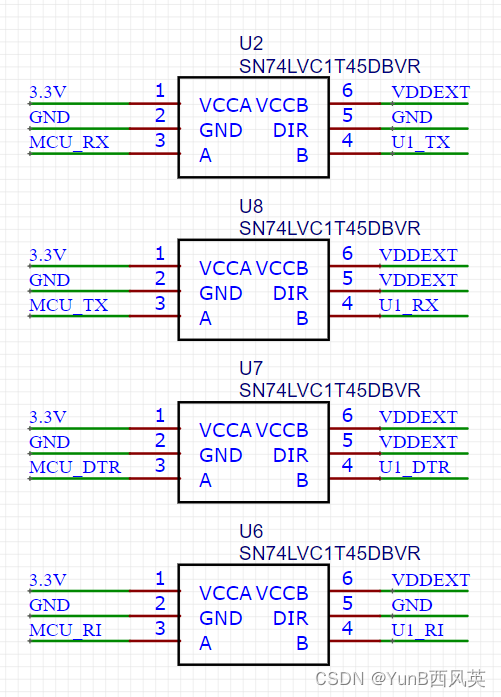
功能
- 这款 1 位同相总线收发器使用两个独立的可配置电源轨。A 端口旨在跟踪 VCCA。VCCA可接受从 1.65V 到 5.5V 范围内的任意电源电压。B 端口旨在跟踪 VCCB。VCCB可接受从 1.65 至 5.5V 间的任一电源电压值。这可实现 1.8V,2.5V,3.3V和 5V 电压节点间的通用低压双向转换。
- SN74LVC1T45 旨在实现两条数据总线间的异步通信。方向控制 (DIR) 输入的逻辑电平将会激活 B 端口或 A 端口输出。当 B 端口输出被激活时,此器件将数据从 A 总线发送到 B 总线,而当 A 端口输出被激活时,此器件将数据从 B 总线发送到 A 总线。A 端口和 B 端口上的输入电路一直处于激活状态并且必须施加一个逻辑高或低电平,从而防止过大的 ICC 和 ICCZ。
- SN74LVC1T45 旨在实现通过 VCCA 对 DIR 输入电路供电。该器件完全符合使用 Ioff 的部分断电应用的规范要求。Ioff 电路禁用输出,从而可防止其断电时破坏性电流从该器件回流。VCC 隔离特性可确保 VCC 中的任何一个是否接地,然后两个端口都处于高阻抗状态。
参考资料
SN74LVC1T45DBVR
SN74LVC1T45DBVR
SN74LVC1T45DBVR
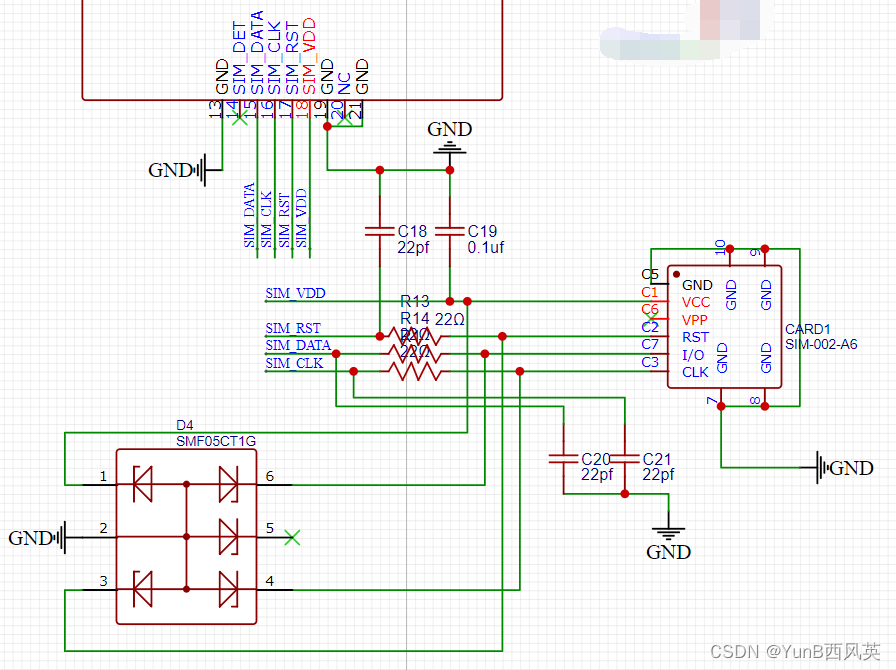
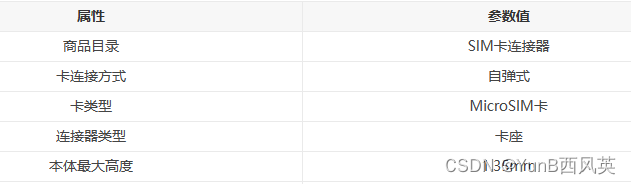
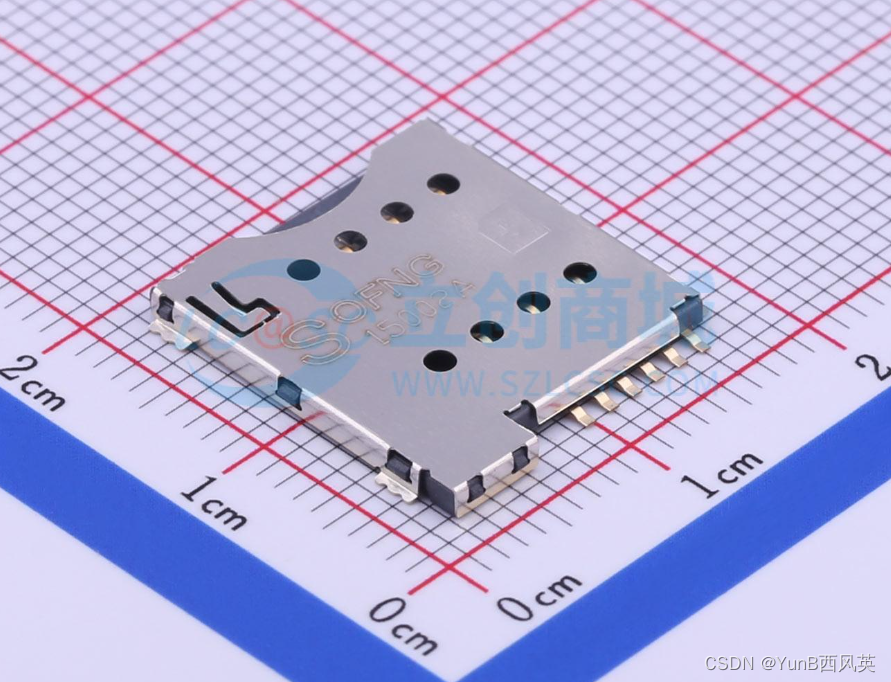
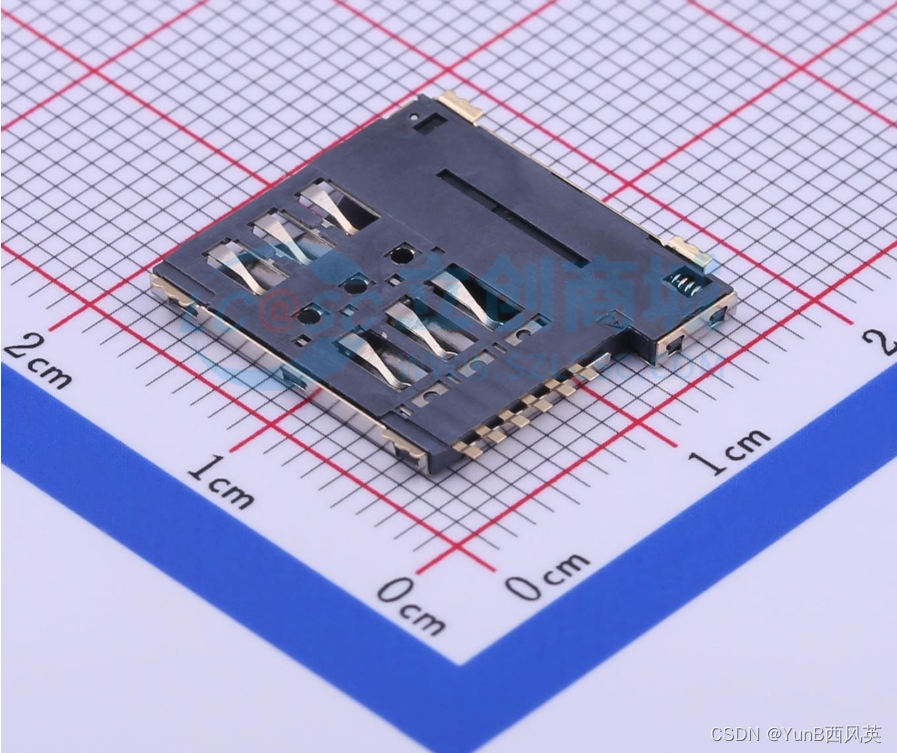
六、元件:自弹式 MicroSIM卡卡座
- 元件介绍
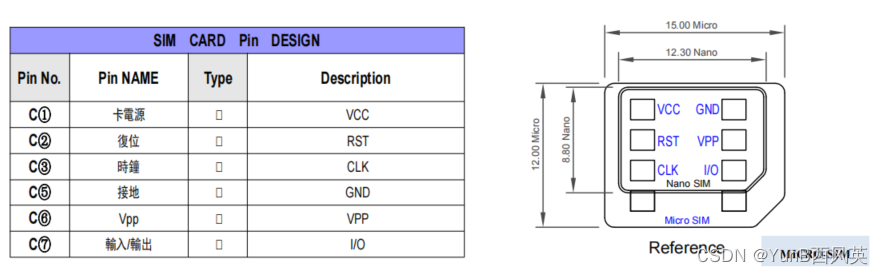
- 引脚
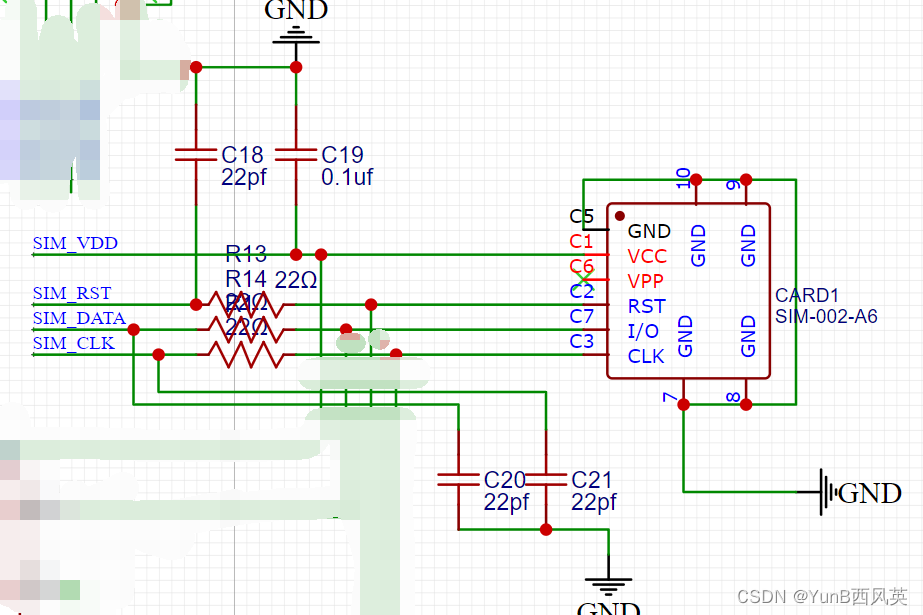
- 原理图
参考资料
自弹式 MicroSIM卡 卡座



![[IJCAI 2022] 基于个性化掩码的实用安全联合推荐](https://img-blog.csdnimg.cn/3a159b16f8ba495bb436b74fa2a3b364.png)
