http://bbs.mydigit.cn/read.php?tid=259281
本人已在相机维修区发帖 地址如下
http://bbs.mydigit.cn/read.php?tid=259277
维修区的帖子被总版加精 同时拆解过程也完成 资料图以及非维修拆解(卡口构件拆解)请移步 此贴将不更新
但想到这里的拆客更多因此再发出来与大家分享 并且这个是拆机工具到手试用
拆解美能达50/1.7
最近很少发帖 因为没有好的东西能发出来和大家分享
前阵子看了
http://bbs.mydigit.cn/read.php?tid=252242
之后正好同学有一个镜头是一样的问题叙述 于是拆修的活我给接下来了
目前镜头已拿到 问题与上面这个帖子几乎相同 同时论坛的拆机工具也已拿到
这个镜头也是因为光圈部分有油导致光圈动作不灵活 在最大光圈时无法收回 同时光圈收回速度太慢必然影响使用 手动改变光圈大小可看到有油污在叶片上 虽然没有上面那个帖子里Auto Chinon 55mm的严重但是也确实影响到正常使用 也就是因为这样一个原因我那个同学才以低价收到的这个镜头 目前镜头已到我手上 上外观图片和症状展示
镜头以及即将使用的拆客工具 工具到手试用

前视图

后视图

侧视图 底下防滚的木条是从画框店要的下脚料 纵向锯开 计划加工为U盘外壳

从下图中可看到光圈上有一定的油污 这直接导致光圈叶片间阻力增大 进而无法自如收放

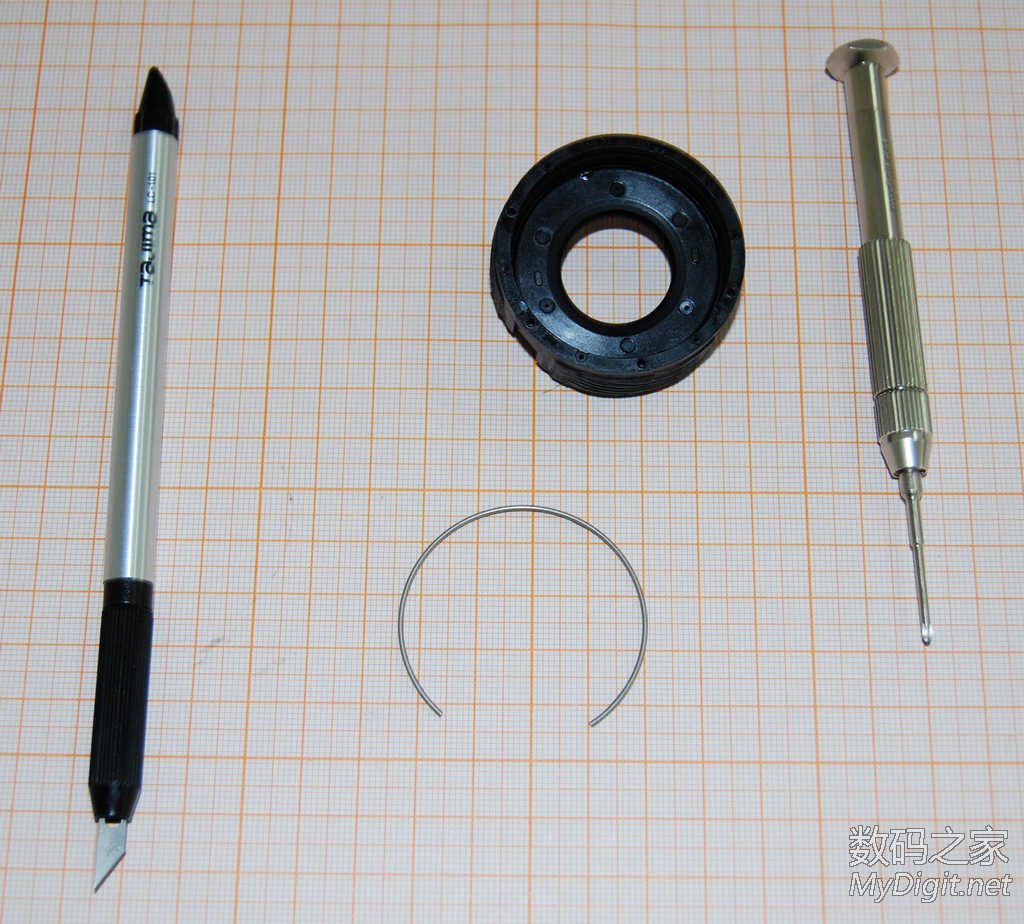
经过本帖之前的求助获得拆前装饰圈方案 拆机工具如下

用我暴力的小三9系把头部削圆 后用胶将胶皮条粘住 获得最为犀利的拆机工具 看到这个没人会想到是拆单反镜头的吧

成功分离前装饰圈构件

前部拆掉镜头自带遮光板构件

分离构件

拆开后正面视角 因之前已经从后面拆过 此时知道两圈螺丝我需要拆内圈

取下四颗卡口固定螺丝

分离卡口构件

取下后镜组螺丝及构件

取下自动对焦联动杆

取下对焦动作限位卡 其中一个螺丝原装上太紧 快拧花了才给拧下来 论坛工具除使用掉镀层外未见异样

前镜筒与前组分离

上面拆内圈的螺丝后 可将前镜组分离

从前后都可看到光圈构件 此时光圈构件又一卡圈固定 外文拆解资料使用钩针专用工具 这个又没有啊

于是用笔刀 将刀片反装 顺利撬开卡圈

取下卡圈
将卡圈拆下后顺势获得光圈构件
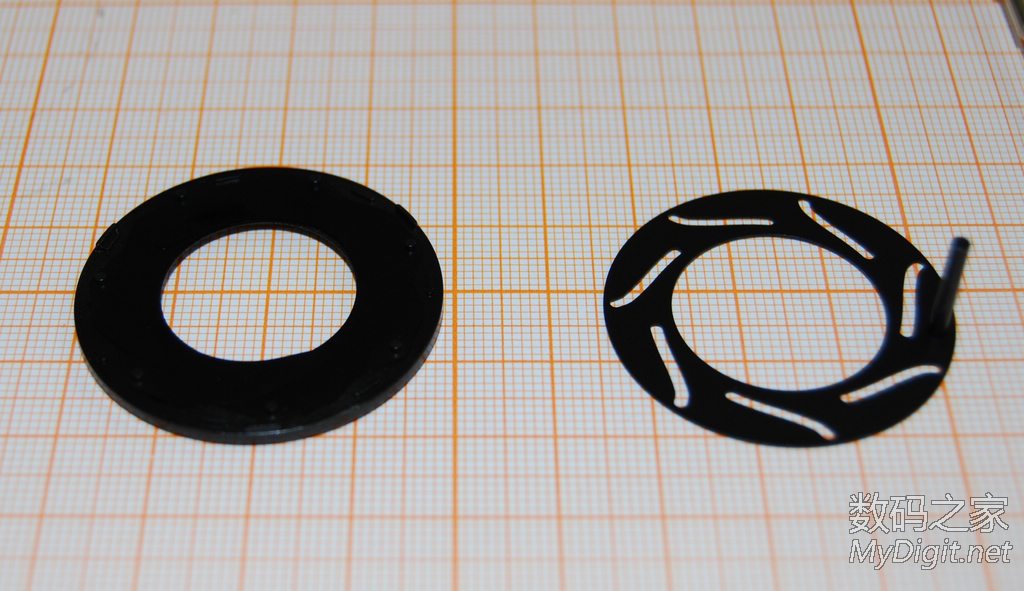
而后将光圈调到最小以记录光圈叶片相互位置关系 此时直观的看到叶片上的油污影响光圈叶片运动

确定记录清楚后依次拿下光圈叶片 七个小矮人