
恢复AM600的出厂默认IP地址(192.168.1.88)。AM600上电启动后,将RUN/STOP拨到STOP 状态
位置,然后按住MFK 键直到数码管显示IP,松开按键;如果确认要复位IP 地址,再按一下MFK 键,数
码管开始显示10,9,8... 倒计时:(在计数到0 之前按MFK键会取消复位操作)
,倒计时结束,IP 复位完成,
PLC 重新上电后,将使用新的IP 地址。USB 连接方法:驱动在文件目录-》 InoProShop\CODESYS\Common\AM600 usb driver

InoProShop中型PLC后台编程软件V1.7.3-SP3(SP值越高,优化点越多)
HC_OmronUtils-V 1.2.0.0 库指令
SM3_CNC.Compile-library 4.10.0.0 版本。(运动控制库)PLC 类型 固件版本
AM600 1.38.0.0 1.39.23.0 固件去水滴社区下载
AM401 21.38.0.0
AM402 41.38.0.0
AM403 81.38.0.0
AC700 1.9.0.0
AC800 1.22.0.0升级固件:
步骤 1:打开 Inoproshop 软件,选择【工具】->【Inoproshop工具】,打开 InoproshopTool。
选择【通信配置】->【扫描网络】Gateway双击,选中 PLC 设备名。
步骤 2: 选择【升级】->【PLC 固件升级】->【获取 PLC 信息】,正常情况下,会显示 PLC
型号、固件版本。库加载:
打开 Inoproshop 软件,选中【库管理】,如 HC_OmronUtils 库指令SM3_CNC.Compile-library 4.10.0.0 版本修改库版本:
打开 Inoproshop 软件,选中【库管理】-》【占位符】-》【函数库】-》选择版本-》【确定】
分别修改 SM3_CNC 和 SM3_Transformation 到 4.10.0.0 版本
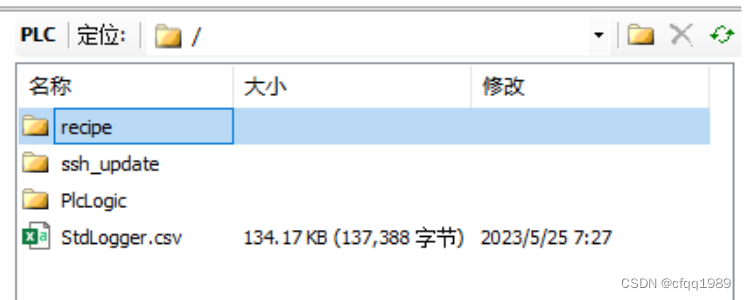
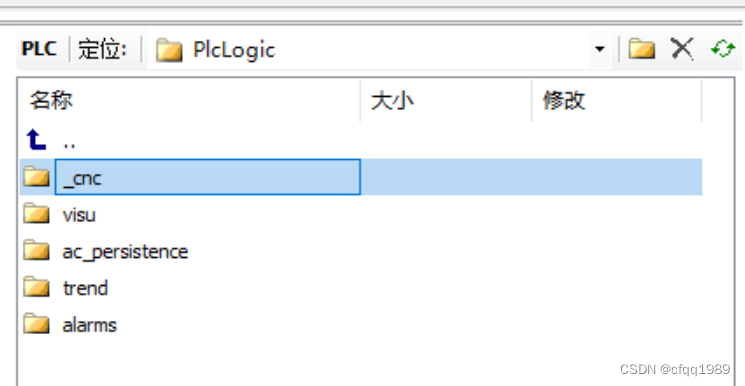
G代码文件放在 _cnc 文件夹内
注意 _cnc 文件夹在 PlcLogic 文件夹内。
不同品牌plc会不一样。(有的在根目录下) 
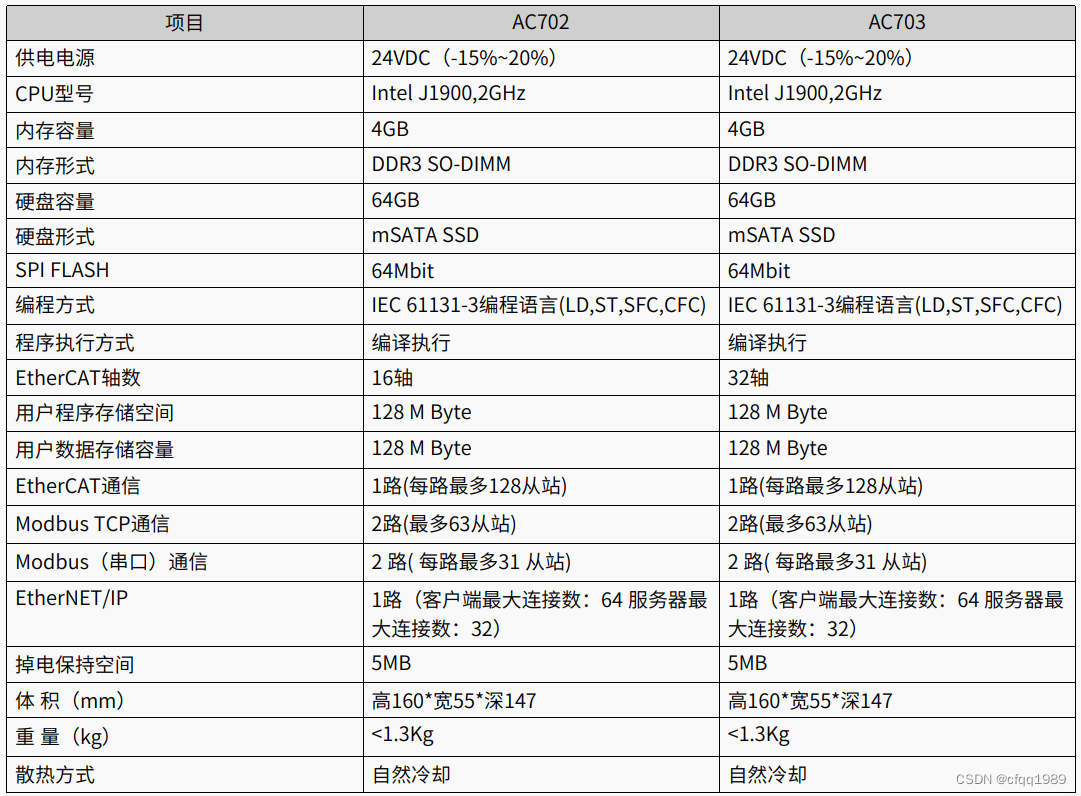

AC801-CPU性能高于ac702
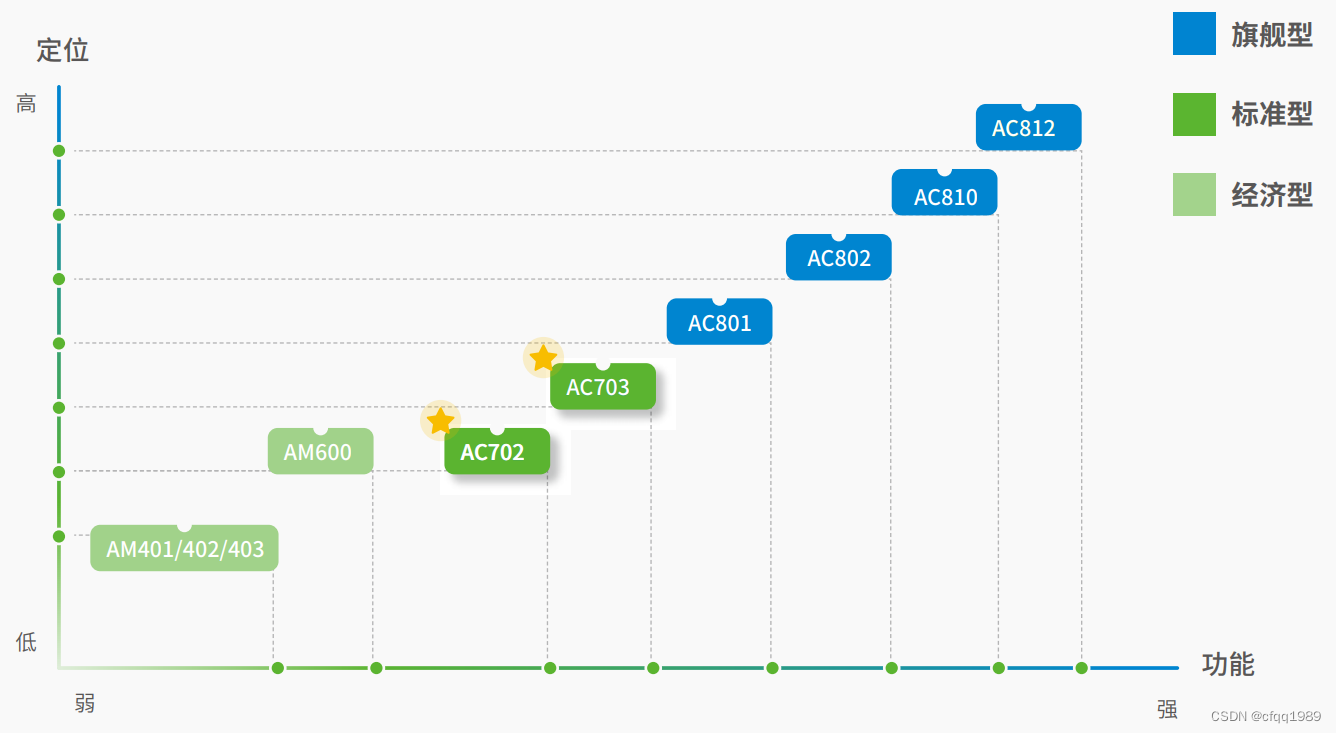
AC702 cpu赛扬j1900 -2.0Ghz-DDR3-4G-16轴 新3800旧AC801 cpu赛扬3855u -1.6Ghz-DDR4-4G-48轴 新3800旧2500
AC802 cpu赛扬3855u -1.6Ghz-DDR4-4G-128轴 新8500旧3500(主板1200)
AC810 cpu酷睿i5-7200u-2.5Ghz-DDR4-4G-256轴 新8500旧6500
AC812 cpu酷睿i7- -2.7Ghz-DDR4-4G-256轴 新8500旧6500
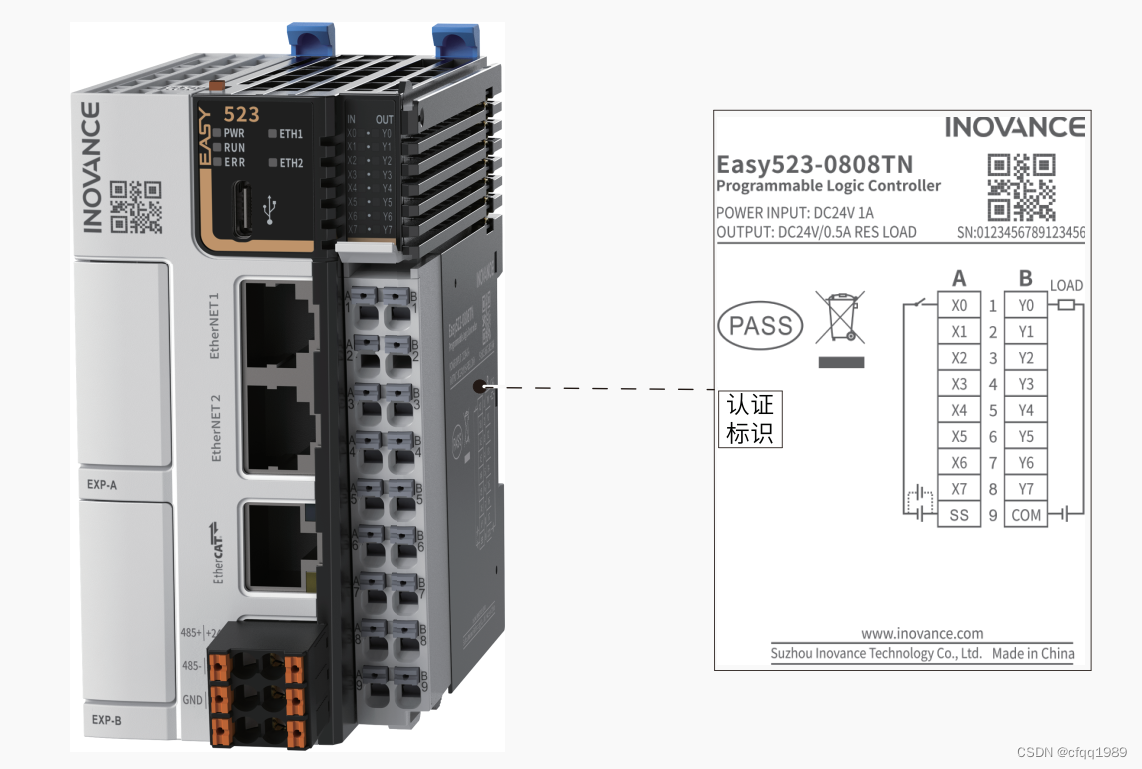
总结:easy523内存太小,适合做分布式io(二手的GL10-RTU-ECTA耦合器,扩展io性价比高)用台达 DVP-12SE11T 组建分布式io 200元32输入:DVP-32SM11N(牛角座)
16输入:DVP-16SM11N(端子座)32输出:DVP-32SN11TN(牛角座)PNP
16输出:DVP-16SN11TS(端子座)PNP8入8出:DVP-16SP11TS (PNP)
8入8出:DVP-16SP11T (NPN) 100元AC703和AC801看价格,AC802能带CAN轴
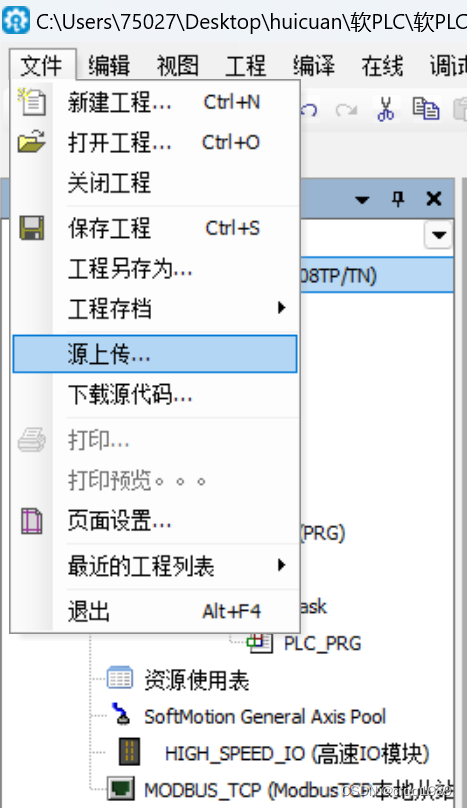
0上传程序:
1EtherCat的安装:
以伺服的品牌去官网下载对应的ecat文件。比如台达B3E伺服(A2E支持全闭环)


然后再解压出文件放桌面。再打开汇川编程软件
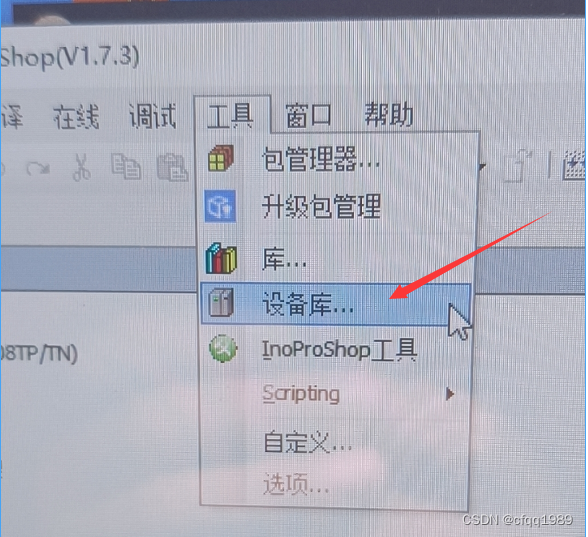
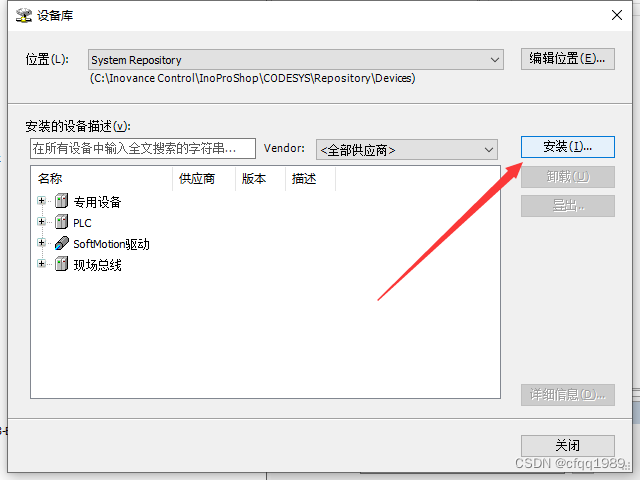
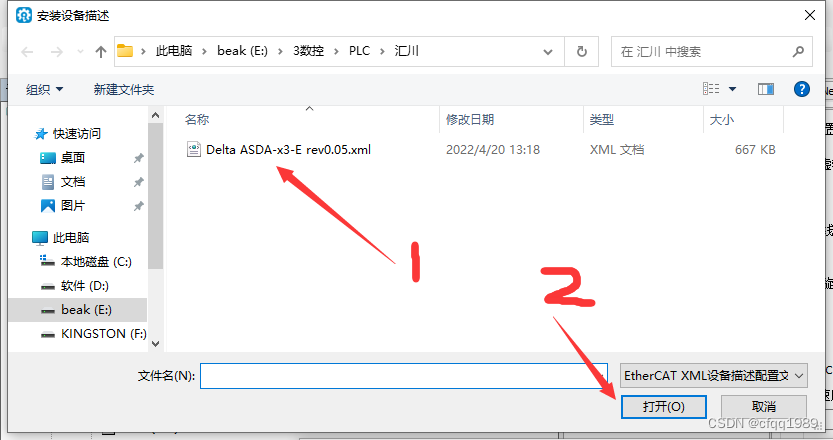
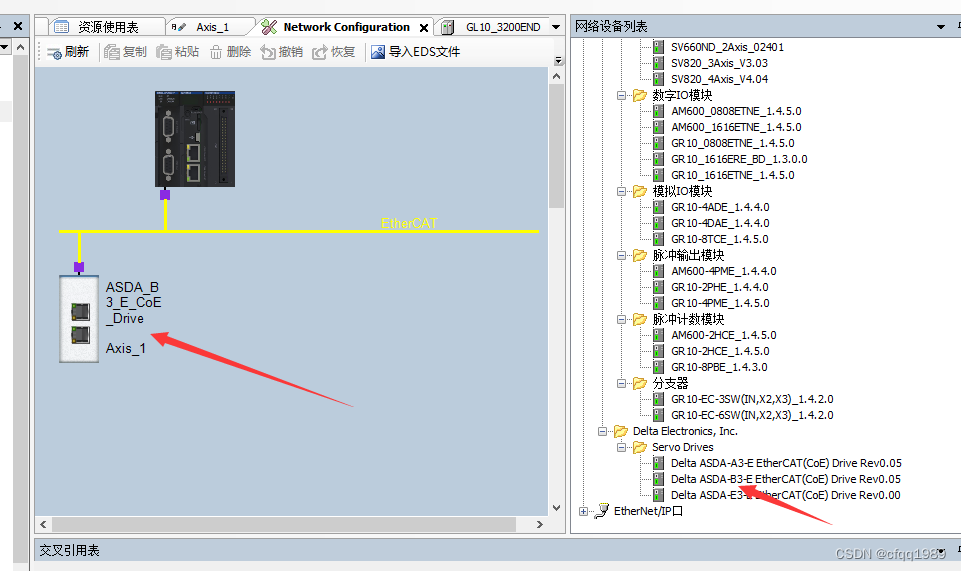
直接拖入左边就行。
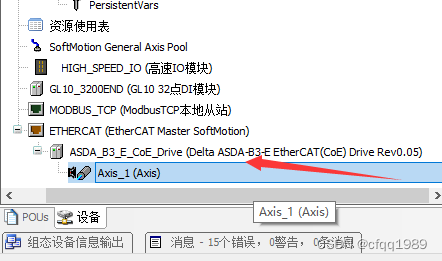
右键,添加标准402轴 (如果没有标准402轴,检查下: 在线》仿真》去掉勾选√ )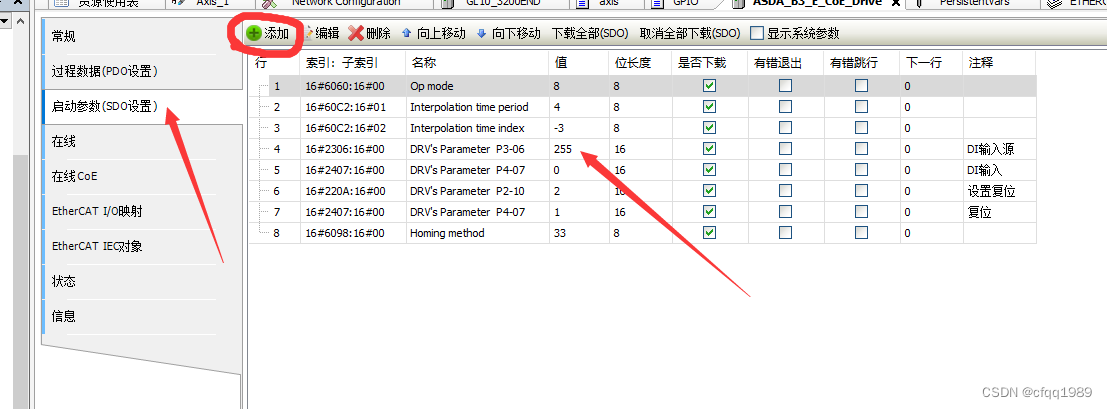
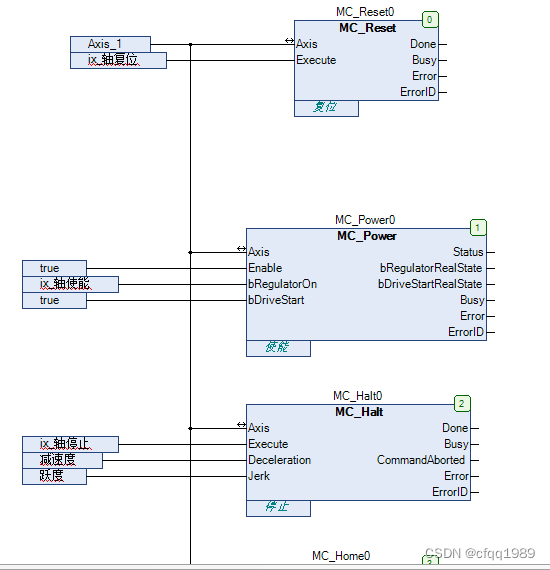
这里添加伺服初始化,不然伺服会E13(急停)报警,这里初始化了DI的功能和DI输入的值。
( DI:这个是伺服多功能输入端子 ,可自定义点动,正转,反转,急停,复位,力矩等)
SDO是初始化,它只运行一次。
PDO是快捷命令(快速呼叫),使用前需要先绑定寄存器指针。
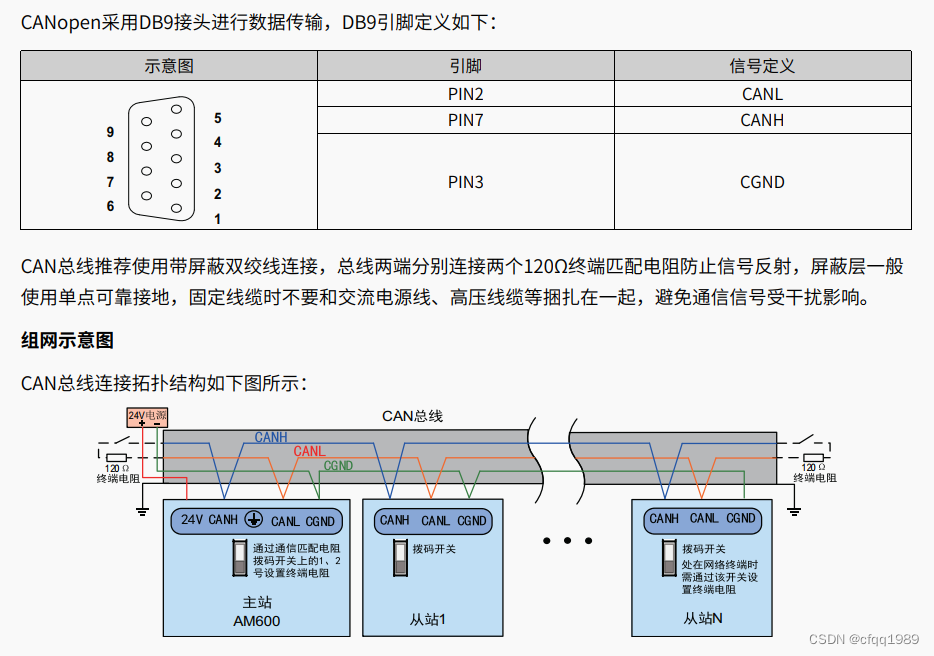
canopen总线命令介绍:https://blog.csdn.net/cfqq1989/article/details/128707894PLC带can轴,plc站号是127,速度最快1Mbps,分配给轴站范围 1...126canopen寄存器分区 0x2000~0x5FFF 是留给伺服厂家定义参数(需要看伺服的品牌参数)CanOpen数据帧,上位机设计C#_c# canopen_cfqq1989的博客-CSDN博客
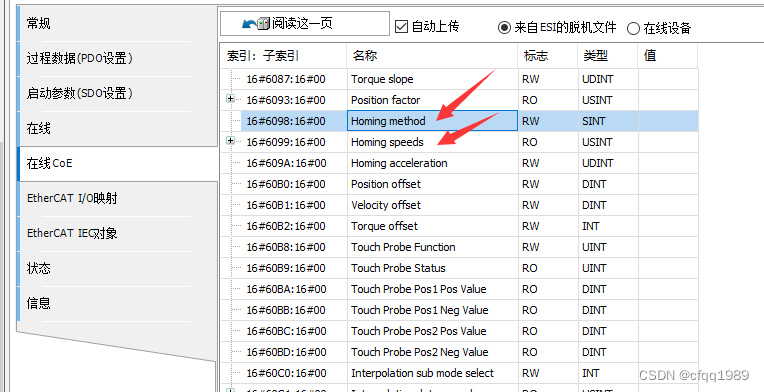
这个是回零模式和回零速度。我比较喜欢力矩机械回零。
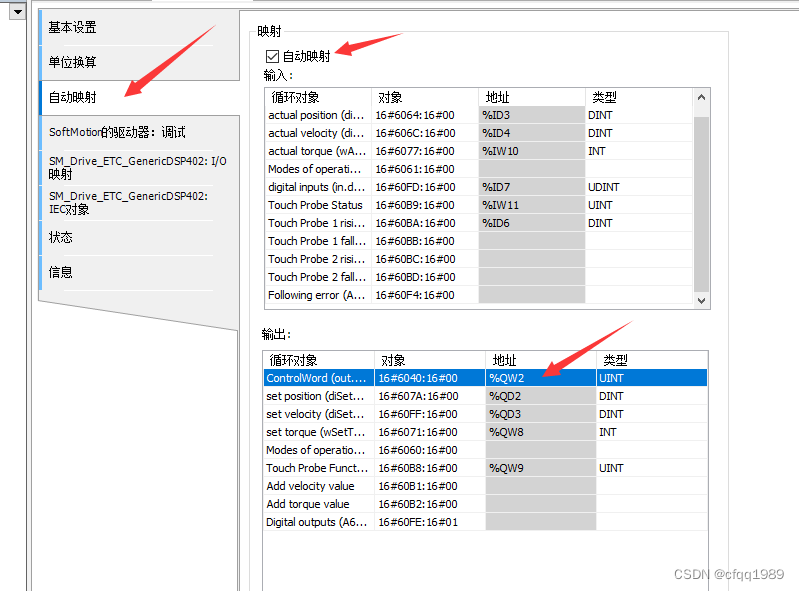
这个是地址映射关系。你是否用C#直接读写寄存器?
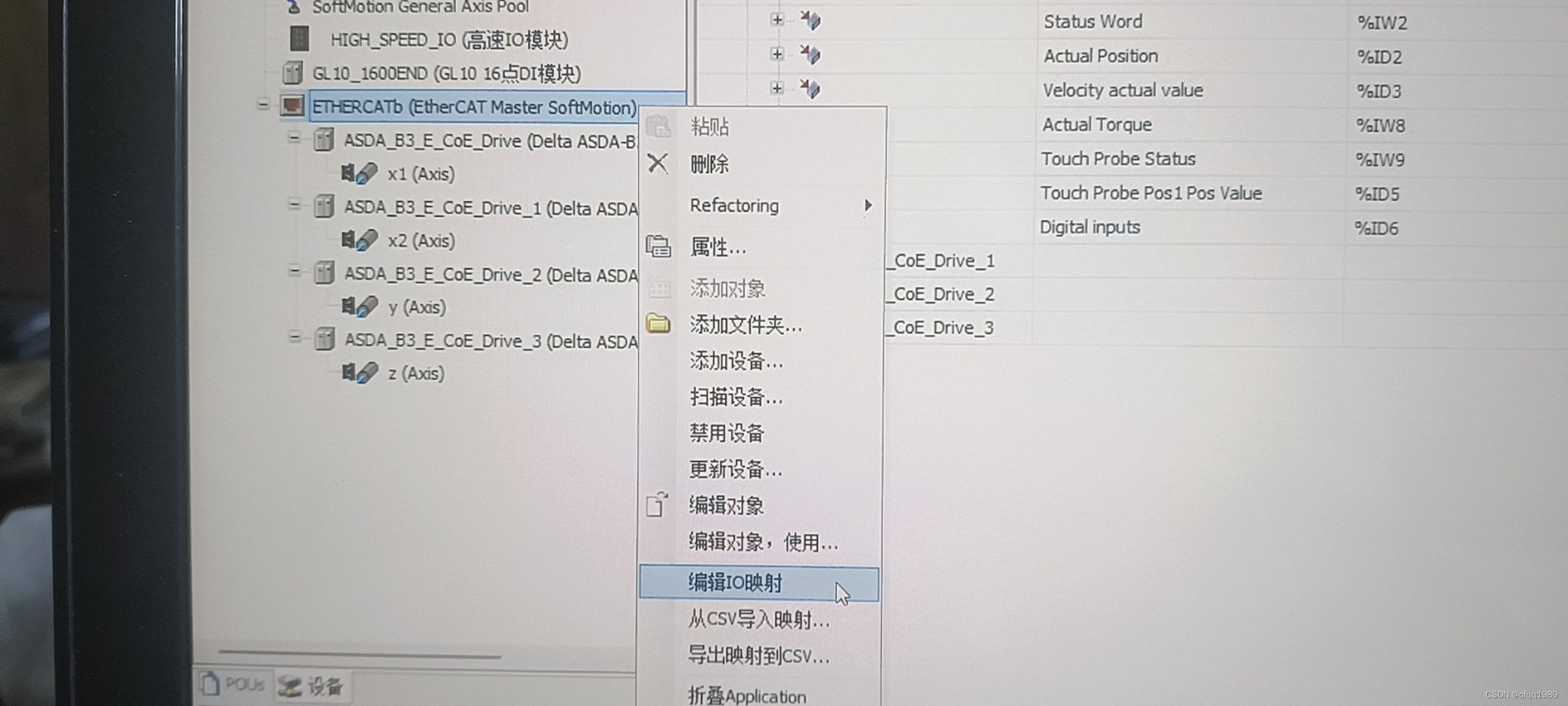
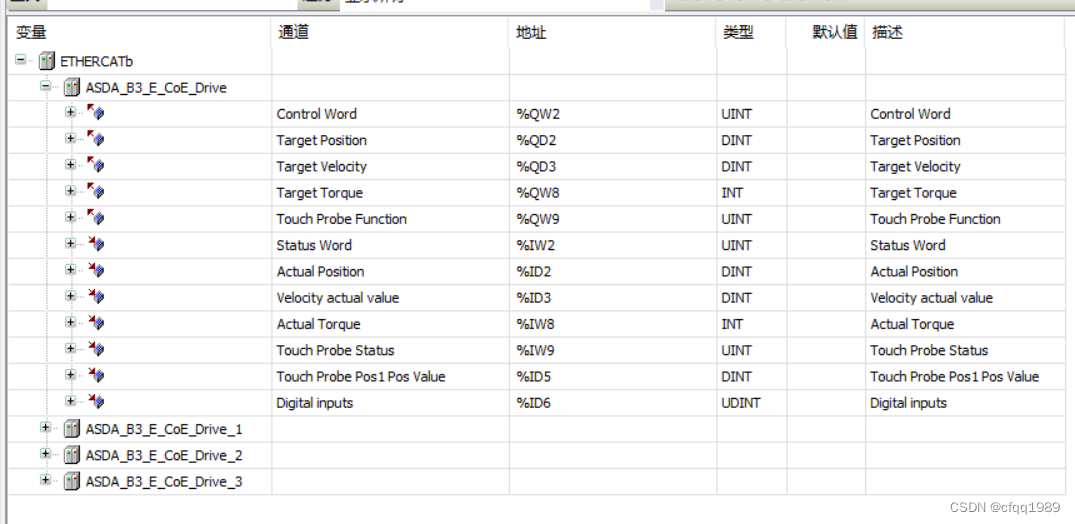
地址导出CSV
2编程前的准备工作:

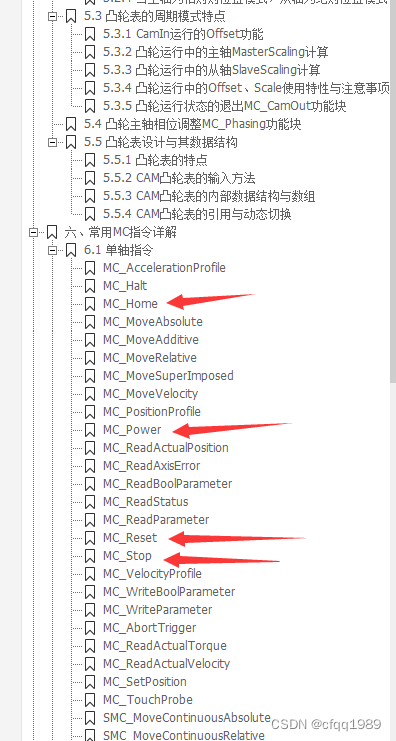
先看运动手册 pdf ,新手先看 软件手册

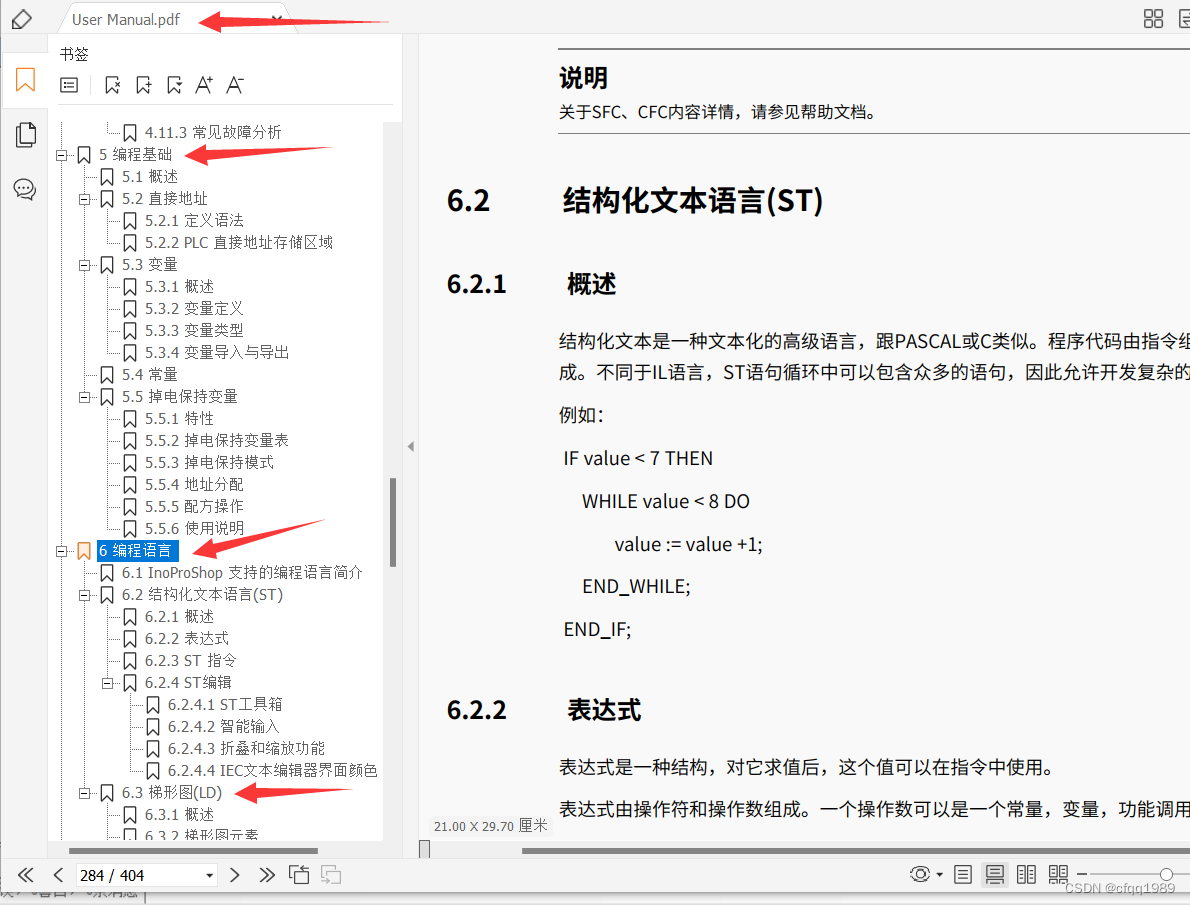
花半天时间把ST语法学会,这里面有编程手册,写程序时先选中再按F1获取帮助
F1可以获取帮助(类型修改 shift+F2)输入助手
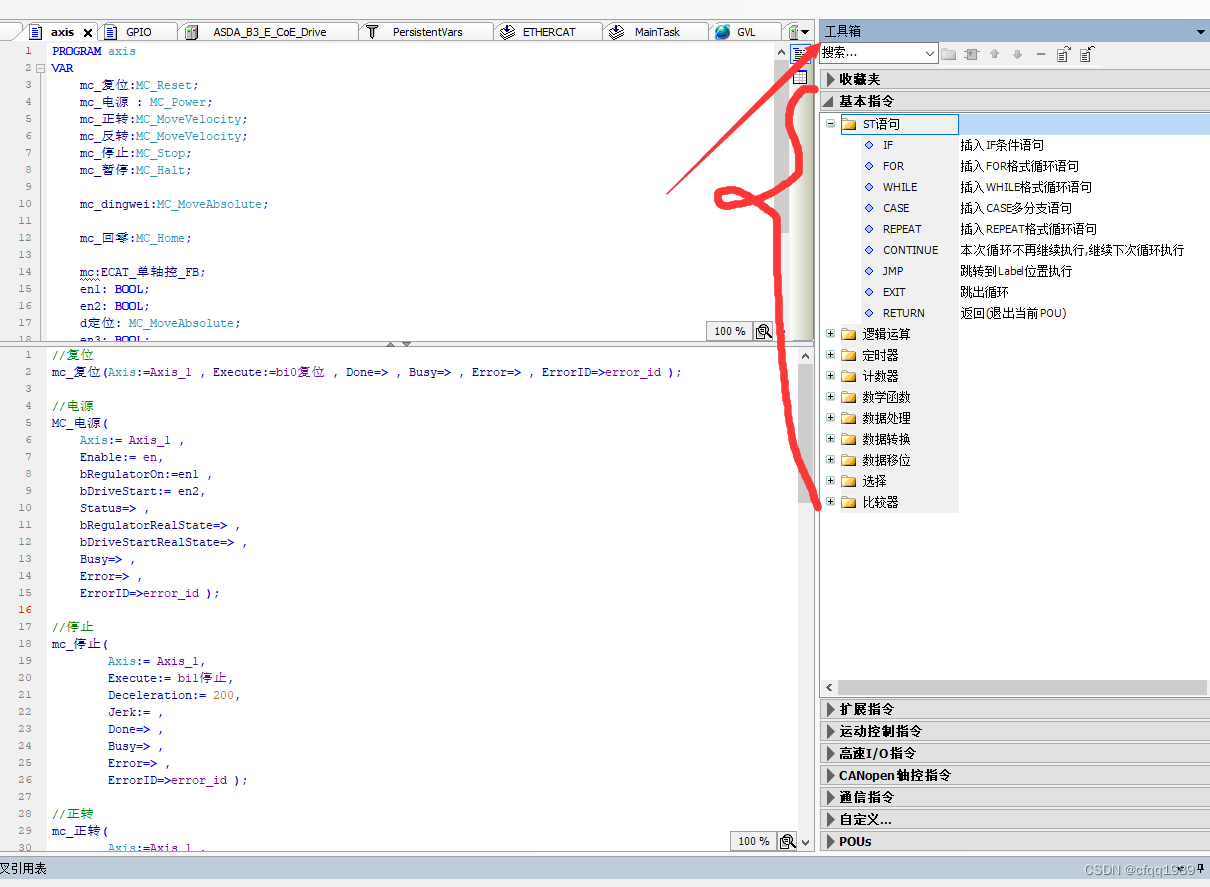
对象直接拖入左侧 有用过C#控制ecat轴的朋友请留言。
C#怎么读写伺服参数。