#include<stc8a8k.h>
#include<oled.h>
#include<delay.h>
#include<stdio.h>
#include "hpwm.h"
//***************************************************************************下面是接线定义
//左电机
sbit LPWM=P2^0;//电机调节速度的信号
sbit LA2=P0^4;
sbit LA1=P0^5;
//右电机
sbit RPWM=P2^1;
sbit RA2=P0^6;
sbit RA1=P0^7;
//接传感器
sbit L1S=P1^0;
sbit L0S=P1^1;
sbit MS=P1^2;
sbit R0S=P1^3;
sbit R1S=P1^4;
//*************************************
sbit key=P3^4;//接按键
sbit beep=P0^3;//接蜂鸣器
sbit led=P0^0;//接LED报警灯//****************************************************************************下面是全局变量的定义,每个函数都能使用
//定义黑白线的信号,根据实际模块定义,1是高电平,0是低电平,后面如果换模块,
//不同模块的情况不一样,有些是碰到黑线是1,有些是0,就很容易修改
unsigned char blackline=1;
unsigned char whiteline=0;
unsigned char startflag=0;
//这里定义变量,后面如果小车需要调节速度,比较方便修改,直接改这里就好了。
float vleftmove=0.4;
float vrightmove=0.4;//直线行走的速度float vturnbig=0.55;
float vturnsmall=0.25;//转弯的速度差速度,一个是大,一个小,小转弯差速度float vturnbigM=0.75;
float vturnsmallM=0.1;//转弯的速度差速度,大转弯差速度unsigned int maichongnum=0;//脉冲个数
float zhouchang=2.04;//小车直径65mm,3.14*65=204.2mm=2.04cm
float distance=0.1;
unsigned int miao=0,fen=0,countT0num=0;unsigned char disbuf[9];//给显示用
//**************************************************************************************************下面是子函数的定义、或者声明
//循迹函数声明,先声明后定义,不然main都不知道有这个函数,在main函数后面定义具体程序代码
//****************************************************************子函数0:函数声明;void trackline0();
void trackline0();
//****************************************************************子函数1:qianjin(float vleft,float vright)
//这个是定义,不声明,后面main函数可以直接用,
//小车前进,根据速度两个轮子速度差,进行前进,转弯等
void qianjin(float vleft,float vright)
{HPWM_Set(0,8000,vleft);LA2=1;LA1=0;HPWM_Set(1,8000,vright);RA2=1;RA1=0;}
//****************************************************************子函数2:void back(float vleft,float vright)
//小车后退程序,一个轮子正转,一个反转
void back(float vleft,float vright)
{HPWM_Set(0,8000,vleft);LA2=0;LA1=1;HPWM_Set(1,8000,vright);RA2=1;RA1=0;}
//****************************************************************子函数3:void stop()
//小车停止
void stop()
{ LA2=0;LA1=0;RA2=0;RA1=0;
}
//*****************************************************************************************************下面是主函数
//*******************************************主函数
void main()
{//每个外设,比如按键,屏幕,PWM等内部资源的初始化,配置一下环境OLED_Init();HPWM_Init();OLED_ShowString(0,0,"Start,Please..."); //外部脉冲计算走过的距离,初始化//使能INT1中断//定时器0初始化,计算启动的之后运行的时间//5毫秒@11.0592MHzAUXR &= 0x7F; //定时器时钟12T模式TMOD &= 0xF0; //设置定时器模式TL0 = 0x00; //设置定时初值TH0 = 0x4C; //设置定时初值 TF0 = 0; //清除TF0标志ET0 = 1; EA=1;//*****************************************************************//*********************************************正式执行程序while(1){ OLED_ShowNum(0,4,miao,5,12);distance=maichongnum*0.05*zhouchang; sprintf(disbuf,"%0.2f",distance);OLED_ShowString(0,2, disbuf); //*****************************//检测按键是不是按下,开始启动if(key==0){delay_tms(10);//延时去抖动if(key==0){ startflag=1;OLED_ShowString(0,0,"running,GO,GO..."); stop();delay_tms(2000);//延时,按下两秒之后,小车开始启动进行循迹OLED_Clear();IT1 = 1; //使能INT1下降沿中断EX1 = 1; TR0 = 1; //定时器0开始计时} } //**********************如果开始标记等于1,说明按下启动键,这时候小车才开始跑if(startflag==1){//开始循迹,请看这部分代码,太长了,单独拉出来写,方便看主程序逻辑 trackline0(); }}
}//***********************************下面是前面声明的函数的定义
//**************************************************************//函数定义trackline0();
//**************************************************************功能:按键循迹;
void trackline0()
{
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++第1种情况if(L1S==blackline &&L0S==whiteline && MS==whiteline && R0S==whiteline&& R1S==whiteline)//1 0 0 0 0 {qianjin(vturnsmallM,vturnbigM);//左da转弯,转到碰到中线停止while(1){if(MS==blackline)break;}}
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++第2种情况else if(L1S==whiteline &&L0S==blackline && MS==whiteline && R0S==whiteline&& R1S==whiteline)//0 1 0 0 0 {qianjin(vturnsmall,vturnbig);//左xiao转弯}
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++第3种情况else if(L1S==whiteline &&L0S==whiteline && MS==blackline && R0S==whiteline&& R1S==whiteline)//00 1 0 0 {qianjin(vleftmove,vleftmove);//直走}
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++第4种情况 else if(L1S==whiteline &&L0S==whiteline && MS==whiteline && R0S==blackline&& R1S==whiteline)//0 0 0 1 0 {qianjin(vturnbig,vturnsmall);//左xiao转弯vturnbig vturnsmall}
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++第5种情况else if(L1S==whiteline &&L0S==whiteline && MS==whiteline && R0S==whiteline&& R1S==blackline)//0 0 0 0 1{qianjin(vturnbigM ,vturnsmallM);//左da转弯vturnbigM vturnsmallM,碰到黑线,不然一直大转弯while(1){if(MS==blackline)break;}}
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++第6种情况 else if(L1S==blackline && L0S==blackline && R1S==whiteline )//11xx0 判断是左转90度{stop();delay_tms(500);qianjin(vturnsmall,vturnbig);//左转弯delay_tms(100);while(1){ if(R0S==blackline)break;} }
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++第7种情况else if( L1S==whiteline &&R0S==blackline && R1S==blackline)//0xx11 判断是右转90度{stop();delay_tms(1000);qianjin(vturnbig,vturnsmall);//delay_tms(10);while(1) { if(L0S==blackline)break;}}
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++第8种情况else if(L1S==blackline &&L0S==blackline&& MS==blackline && R0S==blackline)//1111x 判断是终点,调头{qianjin(vleftmove,vleftmove);delay_tms(500);stop();delay_tms(1000);back(vleftmove,vleftmove);delay_tms(500);while(1)//如果中间的传感器碰到黑线,就跳出循环{ if(MS==blackline)break; }}
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++第9种情况 这是极端情况,放在最后面判断else if(L1S==whiteline &&L0S==whiteline && MS==whiteline && R0S==whiteline && R1S==whiteline)//000找不到直线,如如果前面是直走,就转360度,如果是之前右边,就左转,之前左偏,就右转{qianjin(vturnbig,vturnsmall);//}}//****************************************************************************外部中断,测量脉冲
void INT1_Isr() interrupt 2 using 1
{maichongnum++; //测试端口}
//**************************************************************************定时1s,更新刷新屏幕数据
void TM0_Isr() interrupt 1 using 1
{TL0 = 0x00; //设置定时初值TH0 = 0x4C; //设置定时初值countT0num++;//50ms加一次if(countT0num==20)//1秒时间到{countT0num=0;miao++;if(miao==600)miao=0; }
}循迹+计时+测速+显示
news/2025/2/12 4:07:06/
相关文章

802.11R无线交互
1. 专有名词 2. 说明 Beacon(信标)帧是一种由AP周期发送的广播帧,AP通过周期发送Beacon帧来声明某个802.11网络的存在。STA(无线客户端)收到Beacon帧后可以得知该网络的存在,从而调整加入该网络所必需的参数…

ROS1和ROS2的区别
1、ros1 组件用c/python,ros2 组件用c/python; 2、ros1 只支持Linux和MacOS,而 ros2 支持Linux/Windows/MacOS/RTOS; 3、ros1 的通讯基于TCPROS/UDPROS,强依赖于master节点的处理,而 ros2 基于DDS(分布式架…

软件定义汽车之 Android Automotive OS 发展历程
这篇文章旨在介绍专为汽车打造的 Android 操作系统,而非用来在车辆中连接 Android 设备的 Android Auto 平台。 翻译自 Wikipedia。 信息说明开发商Google系统家族Android官方网址https://www.android.com
Android Automotive 全称是 Android Automotive OS&#x…

stc8a循迹小车程序编写实验:完成循迹功能,包括直角转弯,以及调头
1、实验目的: 利用stc8a8k的内置硬件PWM,这里用到P20,P21产生PWM,调节占空比,调小车速度; 熟悉按键和IO口的读取功能; 2、实现效果, 按下按键开始,两秒后,小车…
OpenWrt新手必备之技能
OpenWrt新手必备之技能 文章目录 OpenWrt新手必备之技能前言一、硬件选择二、固件选择三 、固件安装四 、如何组网4.1. 确认固件的基本信息4.2. 接线组网 五、系统配置六、备份与升级七、小结八、参考链接 前言 Openwrt的生态相当复杂,初次接触的人会感受到不少困惑…

实例4,循迹模块的使用和循迹小车的实现
1、循迹模块介绍;
2、循迹原理;
3、硬件接线;
4、循迹编程思路流程图;
5、循迹程序第一稿(后面再写几篇文章加计时、测距、蓝牙等模块)。
一、循迹模块
目前大一新生,多数用的是数字式的循…
ISO21434 项目网络安全管理(三)
目录
一、概述
二、目标
三、输入
3.1 先决条件
3.2 进一步支持信息
四、要求和建议
4.1 网络安全责任
4.2 网络安全规划
4.3 裁剪
4.4 重用
4.5 非上下文组件
4.6 现成组件
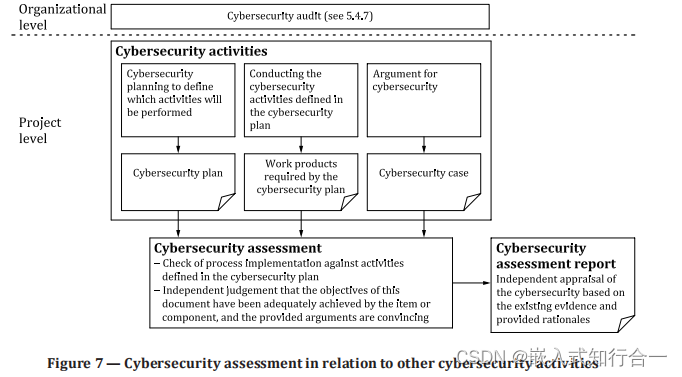
4.7 网络安全案例(Cybersecurity case)
4.8 网络安全评估&#…