最近完成手机云台/稳定器的产品化,特意记录整个手机云台的开发过程 (内容持续细化中...)
一. 电机驱动篇
硬件描述: 直流无刷电机,7对极,控制板mcu为stm32f0。
驱动方式: FOC 控制,驱动板采样两路电流,并配置有编码器。
网上针对FOC的控制文章较多,做起来也不难,在这里主要记录驱动编写的过程及关键点。

1. 首先是编码器的问题,手头的AS5600 编码器,采用SPI接口,1k HZ的频率读取物理角度,在驱动电机过程发现及其不稳定,有噪音,转动速度越快越不稳定。经过分析数据,终于找到原因:驱动过程相位角在变化,而1KHZ的更新速率(PWM更新频率是30K)无法及时跟随到最新的位置。 解决办法:插值,根据物理角度变化速度计算最新相位角。
2. 控制PWM问题,由于采用7段式SVPWM控制,所以定时器一定要采用中央对齐模式,也即三角波。这方面可以参考:https://wenku.baidu.com/view/9d420682bceb19e8b8f6ba9d.html,说的很详细。还有matlab 仿真。
3. 力矩控制问题,基本流程是,根据采样电流,通过Clarke变化和Park变换(记得是电流变换,不是电压变换),计算得出当前的磁链和力矩(绝对值没意义,相对值才有意义)。这时候可以使用pid反馈控制,计算输出 电压和磁链。然后再经过反Park变换和反Clarke变换就可以得出三相输出电压,然后转PWM波即可。整个过程的关键是PID控制参数的选择,一般都直接采用PI控制即可。参数调整需要实践慢慢实验。
4. 关于电流采样的问题,其实可以不要电流采样,理论上来说依然是FOC 控制。首先,采用电流环控制确实有它的优点,力矩响应肯定要快速,能耗也要低一些(动态),但缺点也明显,控制复杂度增加,电流环的PI控制参数要根据实际电路/电机调整,而且积分容易饱和,电流采样时序也要把握好。其次,在更换电机过程中,电流环控制容易出现各种异常现象,都是电流采样引起的。 由于云台属于慢控制系统,对动态力矩响应要求并不高,所以在实际使用中可以去掉电流环(个人意见)。
处理好以上几个问题,电机驱动基本上就完成了。反正我没遇到其他大问题,至于说电气角度的校准之类的问题都是小问题。顺便说下,之前也试过不用编码器,直接使用两个线性霍尔传感器计算物理角度。遇到几个麻烦问题:1.安装精确度要求高,两个传感器必须垂直90度,误差不能超过该4度,否则力矩明显减少。2. 需要做温度补偿。 3. 磁环位置和强度要求配合。总之效果不怎么好,由于时间关系没有继续采用这种方案做,后面再投入一些时间研究下。
最近需要电机发声(省的安装蜂鸣器了),同时云台需要正常运转,找了一些资料看,都没有好的简单的办法,突然想到,直接再控制力矩上增加高频载波是否可行?写了几行测试代码,果然可以发出不同频率的声音,简单搞定。
二. 云台坐标系篇
根绝云台的结构以及控制情况,整个云台包含三个坐标系:
a. 参考坐标系(地球坐标系),手机根据陀螺仪计算出来的欧拉角就属于该坐标系。
b. 机体坐标系, 陀螺仪传感器输出的角速度属于该坐标系。
c. 电机坐标系,电机物理角度及控制力矩属于该坐标系。
各坐标系之间的关系公式推导:
1. 欧拉角坐标系旋转矩阵

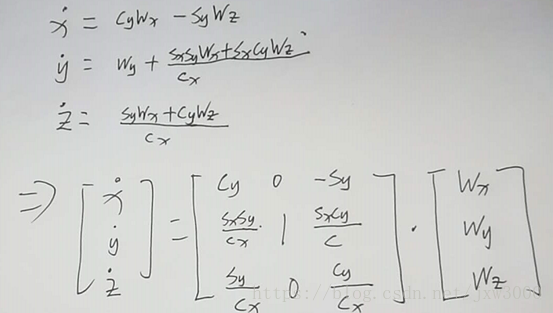
2. 欧拉角变化率与机体坐标系的角速度关系
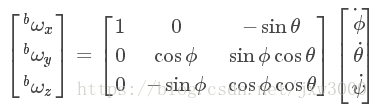
这里有个地方要注意,由于欧拉角俯仰的范围是正负90度,在俯仰接近90度时横滚值会完全不准。但云台的俯仰姿态大于90度的情况很多,所以解决的办法是在计算欧拉的时候把横滚和俯仰调换位置。在这种情况下,该公式就不适合了,根据坐标映射法,推导出的公式是:
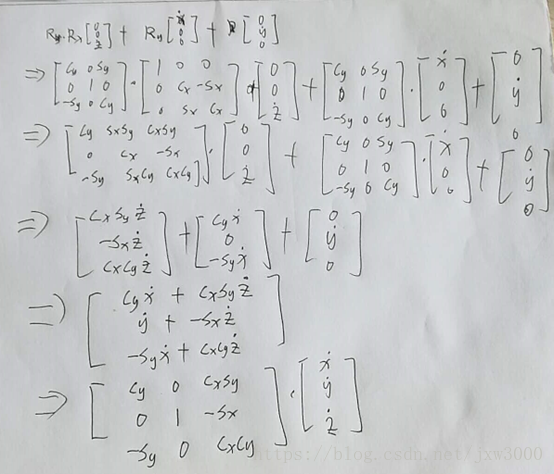
经过matlab仿真,可以使用,注意:该公式只适合Roll在正负60度区间,俯仰可以正负180度。
3. 机体坐标系到电机坐标系
基于以上公式,可以完成云台的所有坐标系转换。
实际在使用过程中发现,俯仰(Y) 的角速度(机体坐标系到电机坐标系)
三. 控制篇
全部控制采用PID 控制,控制环境主要包括:
1. PID 速度环
姿态err = 目标姿态 - 当前姿态
目标速度_e = 姿态err×Kp
整个速度环PID参数,积分和微分参数设置为0即可。
2. PID力矩控制环
目标速度 _b = 参考坐标系转机体坐标系(目标速度 _e)
速度Err_b = 目标速度 _b - 陀螺仪角速度
速度Err_m = 机体坐标系转电机坐标系(速度Err_b)
输出力矩 = PID(速度Err_m)
3. 横拍竖拍模式
竖拍模式,即手机竖直拍摄,但横滚电机角度到达限定值,云台就直接切换为竖拍模式,在竖拍模式下,手机实际姿态是:横滚90度(或负90度),俯仰正负45度。
4. 航向跟随模式
实现方式很简单:
a. 确定手柄姿态(是否手电筒模式),确定控制航向是原航向电机还是横滚电机
b. 计算电机当前位置与目标位置err, 目标航向 = 当前航向 + err*KP
四. 通信篇
1. 三轴间通信
三轴间通信结构图:
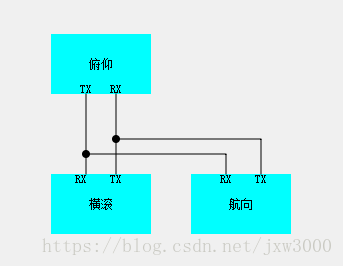
俯仰为主机,横滚和航向为从机,通信速率为1M,主机没500us 发起一次通信。主机发送控制命令,从机将电机位置,控制板状态等信息作为返回。
2. 云台对外接口通讯
由于俯仰作为云台主控端没有直接对外提供串口(不是没有,是硬件不方面,接线麻烦),所以只能通过航向板转发了,通讯又不能影响原本三轴通讯,所以采用的办法是再原来三轴通讯协议上附带转发数据,这样不影响原有流程正常运行。实际运行效果还不错,在不影响云台正常运行的情况下,可以通过PC软件直接设置参数,查看运行曲线。