目录
一、什么是点云三角化
二、常见的三角化算法
1. 贪婪投影三角化(Greedy Projection Triangulation)
2. 泊松表面重建(Poisson Surface Reconstruction)
3. Delaunay三角化(Delaunay Triangulation)
4. 球面法三角化(Ball Pivoting Algorithm, BPA)
5. Alpha形状(Alpha Shapes)
6. Marching Cubes
三、PCL中的三角化算法
1. Greedy Projection Triangulation
2. Marching Cubes
3. Poisson Surface Reconstruction
4. Delaunay Triangulation
5. Convex Hull Triangulation(凸包三角化)
四、代码示例
1. Greedy Projection Triangulation
2. Marching Cubes Triangulation
3. Poisson Surface Reconstruction
4. Delaunay Triangulation (2D)
5. Convex Hull Triangulation
三、总结
一、什么是点云三角化
点云三角化(Point Cloud Triangulation)是从一个点云数据集生成网格模型的过程。点云是由一组三维坐标(x, y, z)组成的离散点集合,它们通常是通过激光扫描、LiDAR 或其他 3D 扫描技术获得的。点云三角化的目的是根据这些点构建一个连续的三角网格,使得这些点相互连接并形成一个完整的3D表面。它们记录了物体表面的众多离散点的空间位置。然而,点云只是点的集合,并不提供物体的表面结构信息。
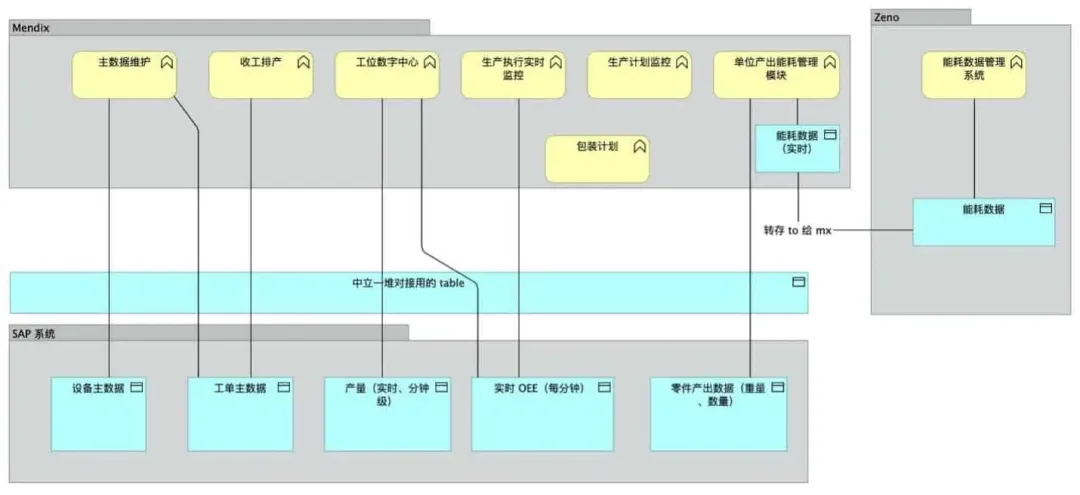
三角化参见思路: