1 范围
本文件规定了全场景下的自动驾驶地图数据质量检测的基本要求、质量检测内容、质量检测指标、质量检测流程、质量检测方法、质量检测结果的判定与质量报告编写的要求等。
本文件适用于自动驾驶地图产品的质量评定,也可用于自动驾驶地图的生产指导和汽车生产厂商或道路精细化管理机构对自动驾驶地图产品的验收和检测。
2 规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 2828.1-2012 计数抽样检验程序第1部分:按接收质量限(AQL)检索的逐批检验抽样计划
GB/T 5768.2—2009 道路交通标志标线 第 2 部分: 道路交通标志
GB/T 5768.3—2009 道路交通标志标线 第 3 部分: 道路交通标线
GB 13000 信息技术 通用多八位编码字符集(UCS)
GB 18030 信息技术 中文编码字符集
GB/T 18316-2008 数字测绘成果质量检测与验收
GB 20263-2006 导航电子地图安全技术处理要求
GB 51038-2015 城市道路交通标志和标线设置规范
GB/T *- 智能运输系统 智能驾驶电子道路图数据模型与表达
T/CSAE 185-2021 智能网联汽车 自动驾驶地图采集要素模型与交换格式
ISO 19157-2013 Geographic information — Data quality
3 术语和定义、缩略语
T/CSAE 185-2021界定的以及下列术语和定义适用于本文件。
3.1 数据集 dataset
可以识别的数据集合。
注:通过诸如空间覆盖范围或要素类型的限定,数据集在物理上可以是更大数据集的一部分。
[来源:ISO 19157-2013 ,4.8]
3.2 质量元素 quality element
说明质量的定量、定性组成部分,即成果满足规定要求和使用目的的基本特征。
注:质量元素的适用性取决于成果的内容及其成果规范,并非所有的质量元素适用于所有的成果。
[来源:GB/T 18316-2008 ,2.4 ]
3.3 质量子元素 quality sub-element
质量元素的组成部分,描述质量元素的一个特定方面。
[来源:GB/T 18316-2008 ,2.5 ]
3.4 检测项 inspected entry
质量子元素的检测内容。说明质量的最小单位,是质量检测和评定的最小实施对象。
[来源:GB/T 18316-2008,2.6 ,有修改]
3.5 质量检测指标 quality measure
定义质量元素的检测等级参数。
3.6 单元产品 grid cell
以地理区域划分的检验某批次数据质量的最小数据集,又称数据质量检测单元、抽样单元。
[来源:ISO 19157-2013 F.4.3.2,有修改]
3.7 单位产品 item
为实施产品检测而划分的基本单位,是能被单独描述和考虑的一个事物。
[来源:GB/T 2828.1-2012,3.1.4,有修改]
3.8 批 lot 检验批
汇集在一起的一定数量的某种产品、材料或服务。
注:“批”特指提交检验的批,它可由几个生产批或生产批的一部分组成。
[来源:GB/T 2828.1-2012 ,3.1.13,有修改]
3.9 批量 lot size
批中包含的单位产品的个数。
注:本文件特指一个批次被检数据中的待检对象的个数。
[来源:GB/T 2828.1-2012,3.1.14,有修改]
3.10 样本 sample
在抽样检测中, 取自一个检验批并且提供该批信息的一个或一组单位产品。
[来源:GB/T 2828.1-2012 ,3.1.15有修改]
3.11 抽样检测 sampling inspection
按照一定的抽样方法,从数据集中抽取样本数据进行的检测。
[来源:GB/T 18316-2008,2.12,有修改]
3.12 全数检测 full inspection
对数据集中所有单位产品100%进行的检测。
[来源:GB/T 18316-2008,2.11,有修改]
3.13 轻微错误 minor error
数据产品的一般质量元素不符合规定,对用户的使用有轻微影响。
3.14 严重错误 serious error
数据产品的重要质量元素不符合规定,对用户的使用有重大影响。
3.15 致命错误 fatal error
数据产品的成片、成批的质量元素不符合规定,对用户的使用有致命影响,需返工重做。
3.16 错误率 error rate
检测出的错误个数占整个被检产品要素(关系)记录个数的比率。
3.17 接收质量限 acceptable Quality Limit,AQL 可接受质量水平
当一个连续系列批被提交验收抽样时,可允许的最差过程平均质量水平。
[来源:GB/T 2828.1-2012,3.1.26]
3.18 绝对精度 absolute accuracy 外部精度 external accuracy
地图成果中某点的位置与真实世界中该点的实际位置值的一致程度,一般用多次测量成果的均方根误差表示。
注:由于真值的不可获得性,实际检测时,一个检测单元的绝对精度一般用检测单元内均匀分布的数个特征点的位置误差的均方根误差表示。
[来源:ISO 19157-2013, D.4.1 ,有修改]
3.19 相对精度 relative accuracy 内部精度 internal accuracy
地图成果中某两点之间的距离与真实世界中该两点间的实际距离的一致程度,用起点和末点各自的位置误差之差表示。
注:由于真值的不可获得性,实际检测时,一个检测单元的相对精度一般用检测单元内均匀分布的数对特征点的位置误差之差的均方根误差表示。
[来源:ISO 19157-2013 ,D.4.2,有修改]
3.20 先进驾驶辅助系统用数据 advanced driver assistance system data, ADAS data
为安全、节能的目的,辅助汽车进行转向控制、动力控制决策使用的,道路形状点上描述道路前进
方向几何特征的数据,包括曲率、纵坡、横坡、航向四个道路参数。
注:这些参数一般基于轨迹或点云数据计算得出。
3.21 元数据 metadata
关于被检测数据的说明数据。
[来源:ISO 19157-2013 ,4.19,有修改]
3.22 数据志 data lineage
数据的历史沿革信息。包括获取或生产数据使用的原始资料说明,数据处理中的参数、步骤等情况及负责单位的有关信息等。
[来源:地理信息系统名词(第2版),01.567]
4 缩略语
下列缩略语适用于本文件。
HOV 多成员车道 (High-Occupancy Vehicle lane , HOV)
BRT 快速公交车道 (Lane of Bus Rapid Transit,BRT)
UTC 世界协调时(Coordinated Universal Time , UTC)
AQL 接收质量限(Acceptable Quality Limit,AQL)
RTK 实时动态载波相位差分(Real Time Kinematic,RTK)
RMSE 均方根误差(Root mean square error,RMSE)
ADAS 先进驾驶辅助系统 (Advanced Driver Assistance System,ADAS)
5 基本要求
5.1 概述
本文件规定的被检测自动驾驶地图数据的地理覆盖范围为全场景范围,包括全封闭的高速公路、城市快速路,也包括城际间和城区内的普通开放道路和园区、场区、停车场(库)等的内部道路及停车设施;被检测自动驾驶地图数据的表达方式为矢量地图数据,不包括点云类的特征定位数据。自动驾驶地图数据质量检测的基本要求应包括:
a) 检测对象,又称检测内容,规定被检数据分类、被检数据单元划分、被检数据质量元素和质量子元素。
b) 检测方法,规定不同对象、不同场景使用的不同方法。
c) 检测指标,规定正确的制作要求,列出错误的现象、错误的分类和错误的程度。
d) 检测流程,规定从数据输入到结果输出必须经过的整体检验流程。
e) 检测结果,规定检测结果的表达方式。
5.2 检测内容
5.2.1 数据种类
对自动驾驶地图进行质量检测的数据种类包括两大部分:
a) 实地存在,视觉可见的道路基础设施,分为:
1) 道路交通标线,包括GB 51038-2015和GB/T 5768.3—2009 定义的全部内容,不包括敷设在路面的设施,如井盖、减速丘、挡车器等,那些对象应在路侧及路内其他设施专题表示 ;
2) 道路交通标志,包括GB 51038-2015和GB/T 5768.2—2009 定义的全部内容,不包括广告牌等非交通标志类物体,那些对象应在路侧及路内其他设施专题表示;
3) 路侧及路内其他设施,包括路侧护栏、隔音墙、信号灯、照明灯、广告牌、龙门架、跨路设施、地面敷设设施、路侧建筑物及停车场内的交通设施等。
b) 实地不存在,由道路基础设施抽象而得的要素,分为:
1) 车道交通网络;
2) 道路交通网络。
5.2.2 质量元素
5.2.2.1 概述
质量元素用于描述自动驾驶地图数据某一方面的质量特征,是数据质量指标量化的基本依据。一级质量元素分为完整性、逻辑一致性、位置准确性、专题准确性、时间质量五个方面,每类下面根据需要还可进一步细分为质量子元素,用以更加详细地检测数据质量。
5.2.2.2 完整性
指要素、要素属性以及要素关系的存在或缺失。它由两个数据质量子元素组成:
a) 遗漏,数据集内容与现实世界相比缺少的数据,如实地存在的一组交通信号灯没有表示在被检测的数据集内;
b) 多余,数据集中存在与现实世界相比多余的数据,如实际不存在的路灯被制作了、一个实地存在的道路标志牌被重复制作了两个等。
5.2.2.3 逻辑一致性
指数据结构、数据间关系、数据内容属性遵守自动驾驶地图数据内部定义的逻辑规则的程度。逻辑一致性由 5 个数据质量子元素组成:
a) 概念一致性,对概念模式规则的遵循程度,包括数据集要素内容和要素属性是否能够反映现实世界,符合相关技术要求,具有合理性。如道路交通标线中的面状要素发生重叠,则为概念一致性错误,此类错误现象常常伴有其他类错误的产生;
b) 值域一致性,要素属性的内容与规定的值域符合的程度,如车道类型规定为 1 至 20 的正整数,实际数值超出这个区间,则为值域一致性错误;
c) 格式一致性,数据存储符合数据集物理结构的程度,如点状要素的坐标存储次序是经度 X、纬度 Y、高度 H,实际存储的次序与此不同,则为格式一致性错误;
d) 拓扑一致性,道路交通网络、车道交通网络数据拓扑关系的正确性,如结点上发生交通流只进不出或只出不进的现象、线段未能正确连接到结点上等,则为拓扑一致性错误。
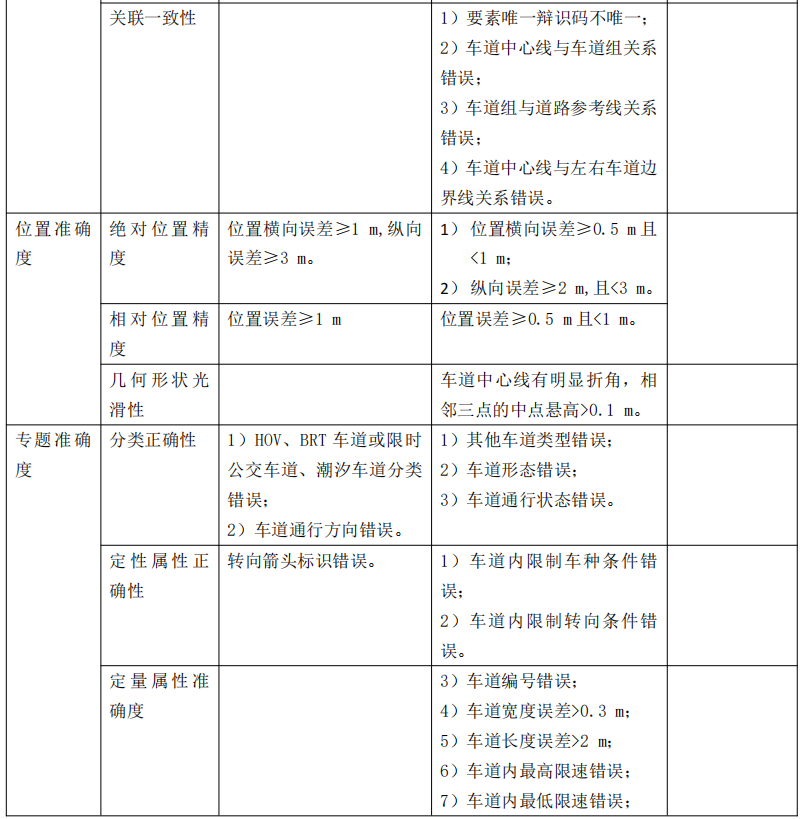
e) 关联一致性,不同种类要素之间相互索引的关系正确性,如车道中心线与车道左右侧边界线关联关系错误,则为关联一致性错误。
5.2.2.4 位置准确度
指要素的几何位置在空间参照系中的准确程度。它由 2 个数据质量子元素组成:
a) 绝对或外部准确度,数据集记录的要素坐标值与可接受值或真值的接近程度;
b) 相对或内部准确度,数据集要素间的相对位置与各自可接受的或真实的相对位置的接近程度。
5.2.2.5 专题准确度
指定量属性的准确度、非定量属性的正确性、要素分类及其关系的正确性。它由 3 个数据质量子元素组成:
a) 分类正确性,赋给要素或其属性的类型与值域的定义符合性,如实地是限时公交车道,类型赋值为快速公交车道或普通车道,则为分类正确性错误;
b) 定性属性正确性,衡量非定量属性是否正确。如车道内实地的转向箭头是直行箭头,错误地赋值为左转箭头,则为定性属性正确性错误;
c) 定量属性准确度,定量属性值与可接受值或真值的接近程度。如实地车道的宽度为 3.5 m,允许的误差 0.2 m,错误地给为了 3.0 m,则为定量属性准确度错误。
5.2.2.6 时间质量
指要素时间属性和时间关系的质量。它由 3 个数据质量子元素组成:
a) 时间度量准确度,报告的时间度量值与可接受值或真值的接近程度;
b) 时间一致性,事件时间顺序的正确性;
c) 时间有效性,与时间有关数据的有效性,如 2 月 30 日,则是非有效的日期。
注:时间度量可以是一个确定的时间点,也可以是一个或多个时间段。
5.2.3 检测项设定的基本要求
质量检测项设定的基本要求是对5.2.1规定的自动驾驶地图数据中的每类数据都要按5.2.2规定的质量元素和质量子元素逐项分别设定检测指标,用以判断数据是否制作正确,是否存在错误,错误的性质及表现。当有的数据不具备某些质量元素特性时,可删减。具体检测指标见第 6 章。
5.3 质量检测单元
数据质量检测单元是检验某批次数据质量的最小数据集,简称单元产品,由数据覆盖范围和数据内容所界定。覆盖范围包括空间范围和时间范围。
数据质量检测单元内的最小检测对象是单位产品,一个单位产品是一个可以单独描述和考察的对象,如一个交通标志牌、一段护栏、一个要素间的关系或一个要素属性等,在数据集中被存储为一条记录或一条记录的一个字段。
5.4 检验批
一个检验批是一次质检活动的整体检测对象,由若干个同一时间段、同一生产工艺生产的数据单元产品所构成。
5.5 检测方法
5.5.1 概述
本文件规定的数据质量检测方法如下:
a) 检测方法应适用于不同的检测对象和不同的检测场景,总体上分为定性检测和定量检测。
b) 定量检测,分为直接检测和间接检测,直接检测又分为全数检测和抽样检测。
c) 几何位置精度检测,分绝对精度检测和相对精度检测,实施方法上分为资料对比法和野外实测法。
5.5.2 定性检测
根据事先确定的数据集整体非量化质量指标对数据集整体进行的质量检测。如对数据资料的合法性、数据成果的出版合法性、数据成果的安全保密性、数据成果的规范性等通过直接检查或演绎推理等方法进行的检测。一般定性类指标出现不合格,则判断数据集质量整体不合格。
5.5.3 定量检测
根据可量化的质量指标,参照数据制作过程中依据的内部原始资料或外部实地复测成果对数据集质量进行的直接检测。如数据完整性检测中,一段道路沿线实地有20个交通标志牌,数据中实际制作了19个,其中1个标志牌被重复制作了2遍,则交通标志牌遗漏2个,遗漏率为10%,多余1个,多余率为5%。
5.5.4 直接检测
直接检测是一种基于数据集内部单位产品检验的质量检测方法。分为内部检测和外部检测。
a) 内部检测,使用制作产品数据的资料数据作为参照物检验产品数据的质量,如根据高精度轨迹数据、激光点云数据和全景影像数据,检验成果数据中要素实体的遗漏和多余,要素属性分类的正确性、要素几何位置的准确性、要素间关系的正确性等;
b) 外部检测,使用不同于成果数据采集手段采集的精度更高的数据进行成果数据的检验,如根据全站仪、RTK 等高精度工程测量设备测量的成果,校验用移动测量采集车测量的成果的位置精度。
5.5.5 间接检测
间接检测是一种基于外部知识或数据生产经验的数据集质量检测方法,可以是主观的。如根据使用自动驾驶地图的车辆定位、规划、引导效果,反推成果数据的道路交通网络或车道交通网络的质量。
5.5.6 全数检测
全数检测是对一个单元产品 (一个数据集质检单元)内的所有单位产品进行 100%的检测。适合于小批量产品或可通过自动化手段完成的检测项,如逻辑一致性里的值域符合性检测。
需全数检测的数据内容应按照客户的要求和可施行的条件划定,本文件不做强制性规定。
5.5.7 抽样检测
5.5.7.1 抽样方法
抽样检测是以现代数理统计理论作为基础,兼顾使用方和生产方的风险与检验费用相平衡的一种检验方法。它按照一定的抽样方法,以少量的个体代替母体,从数据集中抽取样本数据进行的质量检测。
抽样方法要求如下:
a) 单元产品抽样,又称基于区域的抽样,从一个检验批里按一定比例抽取若干个单元产品的检测,抽样比例执行 GB/T 2828.1-2012 的规定,具体见附录 A。
b) 单位产品抽样,又称基于要素的抽样,从一个单元产品里按一定比例抽取若干个要素记录进行的检测,抽样比例执行 GB/T 2828.1-2012 的规定,具体见附录 A。
c) 样本均匀性,总体上应满足本分布均匀的要求。基于区域的抽样时,同一检验批次里要对交通路网复杂地区和简单地区都要均匀选取到;基于要素的抽样时,被选中区域里对不同等级、不同形态道路上的各类要素都要均匀选取到。
5.5.7.2 抽样过程
抽样检查的最小对象是待检数据中的单位产品。确定这些待检对象的过程应遵循 GB/T 2828.1-2012的有关规定。具体样本的抽取过程规定如表 1:
表1 抽样过程定义表
| 序号 | 步骤 | 说明 |
|---|---|---|
| 1 | 确定待检数据的检验批 | 同一时间段、同一作业方法制作的成果数据为同一个数据检验批次。 |
| 2 | 确定抽样原则与方法 | 在兼顾样本多样性、分布均匀性的原则下,随机抽样。 |
| 3 | 确定单元产品的抽样比例 | 在统计检验批里包含的单元产品个数的基础上,按 GB/T 2828.1-2012 的要求,确定基于区域的抽样比例。当检验批里的单元产品个数小于 13时,为满足 AQL=1.0 的要求时,该检验批里的所有单元产品应实行全数检测。 |
| 4 | 确定单位产品的抽样比例 | 在统计各单元产品里单位产品个数的基础上,按GB/T 2828.1-2012 的要求,确定基于要素的抽样比例。当一个质检单元里的被检地理实体或关系对象个数小于 13 时,为满足 AQL=1.0 的要求时, 则应实行全数检测。 |
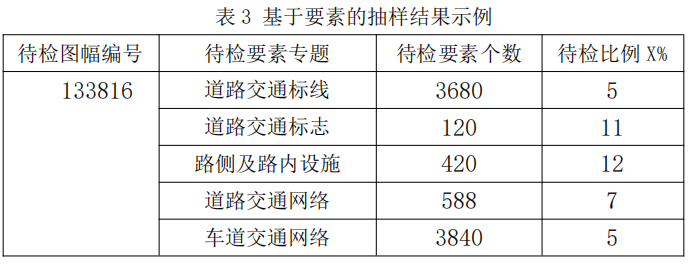
| 5 | 按从检验批里先进行单元产品的抽样,后从被抽中的单元产品里进行各大类专题要素的单位产品抽样的次序,实施具体的抽样。 | 抽样以结果表的方式给出。具体示例如表 2 和表3。 |
5.5.7.3 抽样结果
按 5.5.7.1 的要求,抽样采取两次抽样的方法,一次抽样结果的示例见表 2,二次抽样结果的示例见表 3。
表2 基于区域的抽样结果实例
| 待检批次编号 | 待检批次单元产品总数 | 待检比例 |
|---|---|---|
| 2021-HD-01 | 1024 | 8% |
5.5.8 位置精度检测
5.5.8.1 检测方法分类
位置精度检测方法分如下两种:
a) 资料成果对比法
对照外业测量成果数据中的激光点云数据和全景影像数据等实施的内部检测。
b) 野外特征点实测法
对图上选出的特征点,到实地使用RTK或全站仪等测量设备实施的点位测量,核查精度。
5.5.8.2 检测点选取原则
检测点应按如下原则选取:
a) 检测点数量宜按区域大小选取,一般要求5km 2内均匀选取20-30个检测点。
b) 检测点应尽量选在几何特征或纹理特征明显的特征点上,如交通标线的交点、交通标志牌的角点、杆状物与地面的交点等。
c) 检测点代表的要素类别应覆盖全面,不允许检测区域内某大类要素无检测点。
5.5.8.3 绝对精度检测
绝对精度指地图成果中某点的位置与真实世界中该点的实际位置值的一致程度。单点的绝对精度,应用比制图成果所采用的测量手段更精准的技术手段测得的实地位置与图上位置的距离差表示。一个检测单元的整体绝对精度,应以该单元内各个离散点的距离误差的均方根误差表示。具体计算方法见附录B。
5.5.8.4 相对精度检测
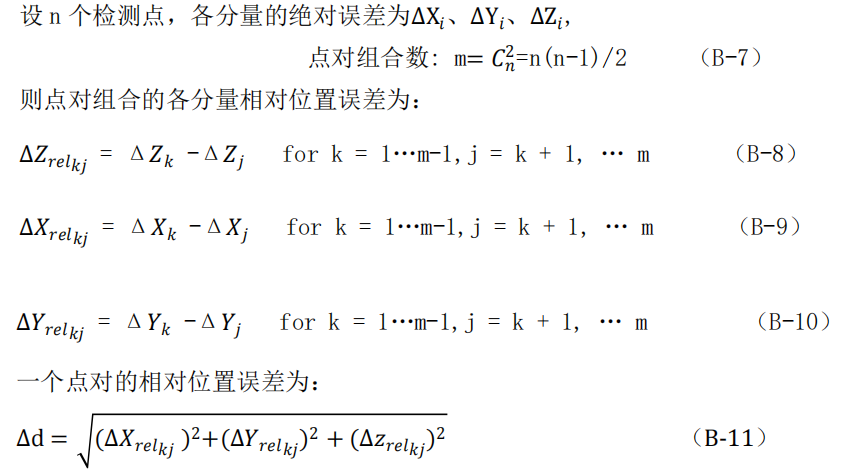
相对精度指地图成果中一点对的两点间距离与真实世界中该两点间的实际距离的一致程度,用起点和末点各自的绝对位置误差之差表示。应在绝对精度检测的基础上,派生计算各点对的相对精度和检测单元的整体相对精度。设选取的检测点为 n,则两两组对的组合数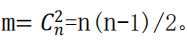
具体计算方法见附录 B。
5.6 质检过程的要求与检测结果的表达
5.6.1 质检过程的基本要求
数据质量检测过程的基本要求应执行GB/T 18316-2008 3.1的规定,整体采用二级检查一级验收的制度。测绘单位的作业部门执行过程检查,测绘单位的质量管理部门执行最终检查,生产委托方执行成果的验收。各级检查工作应独立进行,不应省略或代替。
5.6.2 基本检测流程的设计
自动驾驶地图数据质量的基本检测流程形成质量检测结果的有序步骤,应遵守图1质量检测基本流程图的约定:
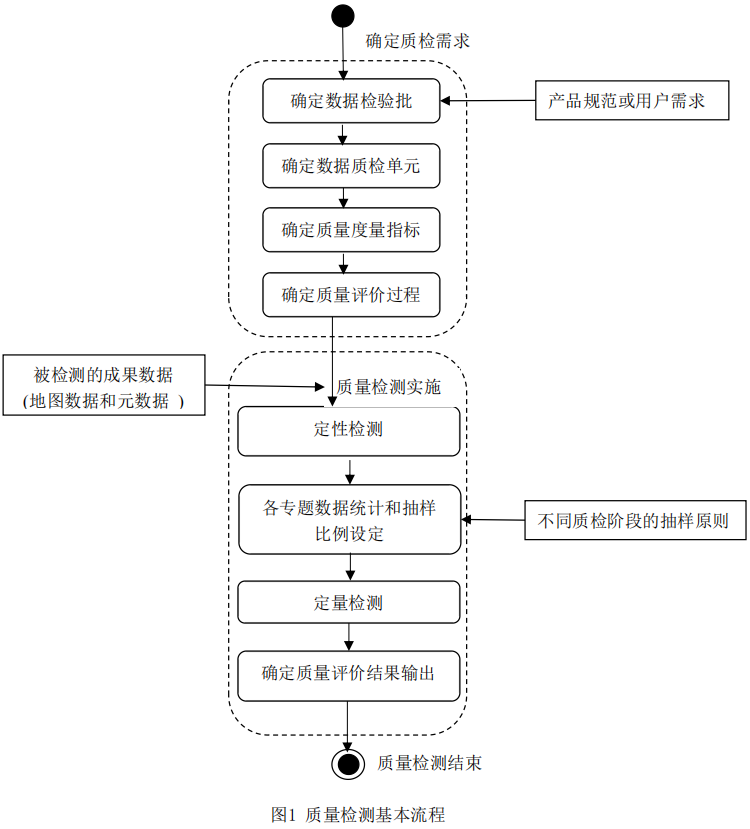
在二级检查一级验收的制度下,不同阶段的质量检查工作环节允许在此基本流程的框架下增加或减少步骤。
5.6.3 检测结果
自动驾驶地图数据质量的检测结果应使用质量检测报告和其附件的形式告知客户。具体报告的内容和形式见第8章。
6 数据质量检测指标
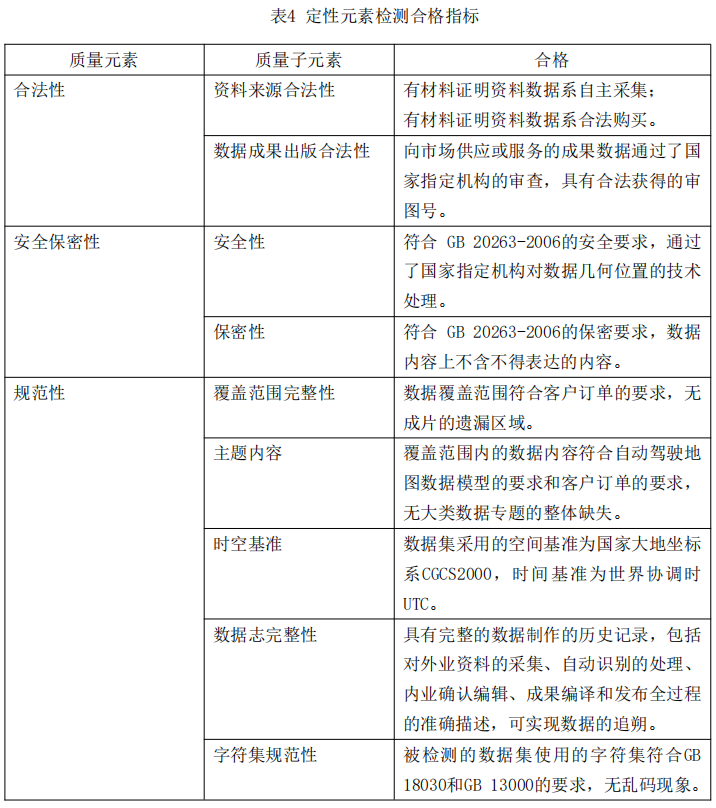
6.1 数据质量定性元素检测指标
数据质量定性元素的检测主要通过对自动驾驶地图实体数据集的元数据的检测和对整体数据的观察来实现。检测时依据的主要质量元素是数据的合法性、安全保密性和规范性。错误等级分为合格与不合格,各项指标中即使有一项存在不合格,也应判断整体数据不合格。检测合格的指标见表4:
6.2 数据质量定量元素检测指标
6.2.1 概述
数据质量的定量元素检测主要针对道路交通标线、道路交通标志、路内或路侧其他设施、车道交通网络、道路交通网络等五大要素主题展开。应针对每大类要素的技术要求、质量检测的定量元素给出具体的质量检测指标。质量检测指标以数据内容的错误严重程度来表征。错误等级分为轻微错误、严重错误和致命错误三个等级。
a) 致命错误指质检单元内成片成批出现的不符合自动驾驶地图技术要求的错误,一经发现,不再进行后继的质量检查,判定为该质检单元的数据整体不合格,退回重新制作,再次提交质检。
b) 严重错误指对自动驾驶有严重影响的数据质量问题,必须在出厂前全部改正完毕。
c) 轻微错误指对自动驾驶的实现有轻微影响的数据质量问题,一般需要在产品出厂前返修完毕,紧急情况下在整体质量为优秀的情况下可以让步放行的数据轻微错误。
6.2.2 道路交通标线
6.2.2.1 道路交通标线制作要求
道路交通标线是路面视觉可见的、符合GB/T 51038-2015和GB/T 5768.3—2009要求的、用于规范交通秩序的自动驾驶地图内容,数据制作总体要求应符合T/CSAE 185-2021的5.4的规定。使用3D线状要素或面状要素表达。具体要求如下:
a) 线状要素表达的交通标线,几何位置应位于地面喷涂的标线的中央位置,对地面交通标线为双线的情况,应对每一条标线单独绘制。虚线和实线顺延变化的地方,应在实线的末端点和虚线的起点相接。当线状交通标线的性质发生变化时应垂直道路走向成组平齐打断,对横向交通标线非阶梯状时应以一个完整对象表达。面状要素表达的交通标线,区域面边界的几何位置应位于地面喷涂标线的中央位置。边界线不允许缠绕,面内不允许有空洞,面状交通标线之间不得压盖。
b) 线状交通标线包括纵向的可跨越对向车行道分界线、可跨越同向车行道分界线、禁止跨越对向车行道分界线、禁止跨越同向车行道分界线、潮汐车道线、车种专用车道线、公交专用车道线、车行道边缘线、路口导向线、导向车道线、可变导向车道线、停车位标线、停靠站标线、白色半圆状车距确认线、禁止长时停车线、禁止停车线、纵向减速标线等,横向的停止线、停车让行线、减速让行线、车行道横向减速标线等,隧道口等的立面标记线及实体标记等。线状交通标线的类型、颜色、线型、宽度、长度等属性赋值应与实地一致,要素的唯一辩识码要唯一,关联的道路要素的关系应准确。
c) 面状交通标线包括人行横道面、导向箭头包围面、路面文字标记面、路面图形标记面、车距确认标记面、导流区、禁止停车区、紧急停车区、待转区、中心圈、停车位面、收费广场前减速标线、进出停车场的防滑坡道面等。面状交通标线的类型、颜色、纹理、面积、箭头朝向、文字内容、图形符号等属性赋值应与实地一致,要素的唯一辩识码要唯一,关联的道路要素的关系应准确。
d) 交通标线几何位置与实地一致,绝对精度小于1 m,相对精度小于0.5 m。
6.2.2.2 道路交通标线检测的错误等级
a) 道路交通标线的致命错误包括:
-
交通标线成片、成批缺失;
-
交通标线的几何位置精度成片超出规定的技术要求;
-
交通标线的各类属性成批不符合规定的技术要求。
-
交通标线数据存储的格式不符合规范要求,应用软件不能正确读取使用。
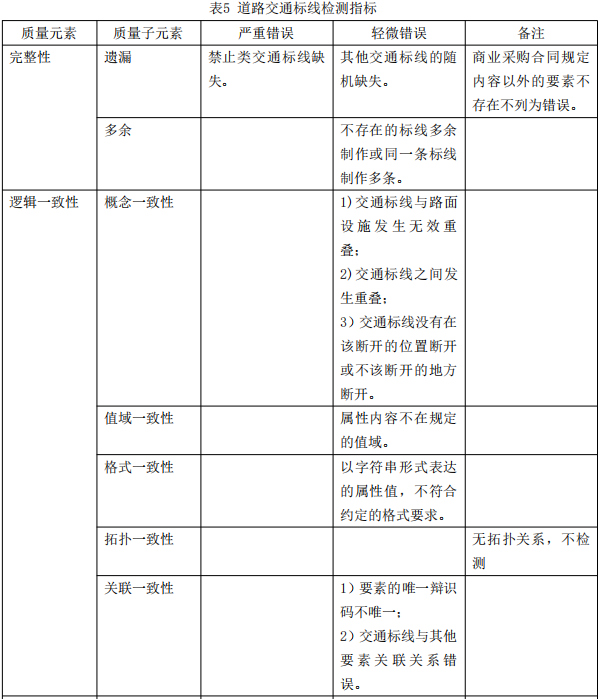
b) 道路交通标线的严重错误和轻微错误见表5:
6.2.3 道路交通标志
6.2.3.1 道路交通标志制作要求
道路交通标志是指挥引导交通使用的,安装在路侧或悬挂在路中央的各种标志牌,符合GB51038-2015和GB/T 5768.2—2009要求,数据制作总体要求应符合T/CSAE 185-2021的5.3的规定。使用3D空中立面面状要素或立方体包围盒表达。具体要求如下:
a) 道路交通标志应包含 7 类主标志:警告标志,禁令标志,指示标志,指路标志,旅游区标志,作业区标志和告示标志,也包括特殊情况下附属在主标志下方的辅助标志以及可变限速、可变情报板等电子式可变信息标志。不制作临时放置的道路交通标志。
b) 空间立面表达的道路交通标志,几何上需绘制其最小的外接矩形面,当交通标志为三角形或菱形时,应以其角点连线构成的立面表示,立面必须按顺时针方向绘制,正面朝向车辆的来向。
独立存在的交通标志牌应单独绘制一个几何面;当主标志下存在辅助标志时,宜分别绘制;对大标志牌内存在小标志牌内容的复合标牌,大标志牌和小标志牌宜分别绘制。
c) 道路交通标志的作用类型、形状类型、面板底色、线划颜色和标志牌的朝向等属性信息应与实地一致。要素的唯一辩识码要唯一,关联的道路要素的关系应准确。属性信息中宜表示道路交通标志的语义信息内容或关联的交通标志的真实照片。作用类型为可变信息标志时,属性信息内容只填充作用类型、形状类型、唯一辩识码和关联的道路关系。
d) 道路交通标志位置与实地一致,绝对精度小于 1 m,相对精度小于 0.5 m。
6.2.3.2 道路交通标志检测的错误等级
a) 道路交通标志的致命错误包括:
-
交通标志成片、成批缺失;
-
交通标志的几何位置精度成片超出规定的技术要求;
-
交通标志的各类属性成批不符合规定的技术要求;
-
交通标线数据存储的格式不符合规范要求,应用软件不能正确读取使用。
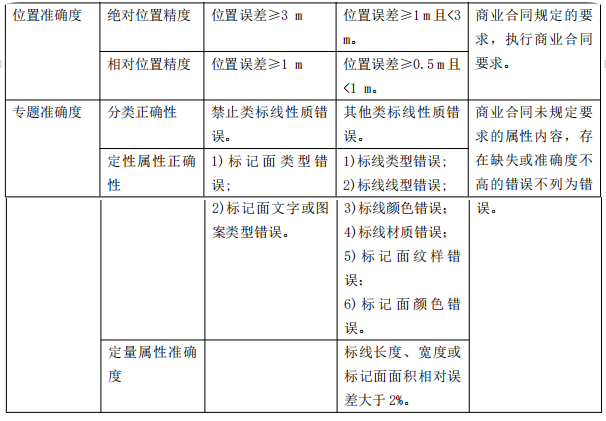
b) 道路交通标志的严重错误和轻微错误见表6:
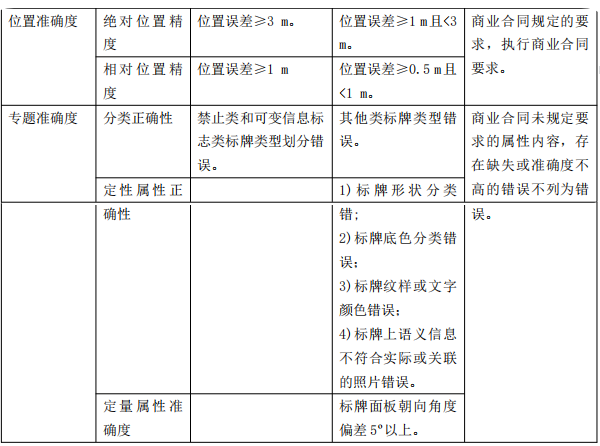
6.2.4 路侧及路内其他设施
6.2.4.1 路侧及路内其他设施制作要求
路侧及路内其他设施指道路交通标志和标线之外的所有全场景的道路设施和其他可用于定位的设施,包括路侧防护设施、跨路设施、道路照明设施、道路监控设施、道路指挥设施、车路协同设施、地面敷设的井盖、挡车器、减速带等道路设施和广告牌、标志性建筑物、桥墩等设施。数据制作总体要求应符合T/CSAE 185-2021的5.5和5.6的规定。使用3D点状要素、线状要素、面状要素或立方体包围盒表达。
具体制作要求如下:
a) 点状要素表达的设施
此类要素主要指地面敷设的道钉、交通警示柱、防撞桶、锥筒,以及空中架设在横杆或竖杆上的道路监测设备或车路协同设备。地面的设施,应以3D点表示物体在路面的根部中心位置。空中架设的设施,应以3D点表示物体的中心位置。要素的类型、颜色、距地面高度等属性内容应与实地一致,要素的唯一辩识码要唯一,关联的道路要素的关系应准确。当呈较长的线状分布时,宜用顶端点的连线表示。
b) 线状要素表达的设施
-
路侧防护设施,包括路沿、水泥护栏、金属护栏、交通警示柱连线、栅栏、护栏网、隔音墙、护墙、排水沟、道路自然边界等,应以 3D 折线表示,每段折线的性质应唯一,折线宜位于路侧防护设施的顶端,也可以位于路侧防护设施与路面的交线。要素的类型、比高、材质、颜色等属性应与实地一致。要素的唯一辩识码要唯一,关联的道路要素的关系应准确。
-
杆状物设施,包括交通标志牌、交通信号灯和龙门架等各类交通设施的支撑杆(横杆和竖杆)、照明灯杆、电力及通信电线杆、广告牌支撑杆、以及停车场出入场的横杆和停车位的地面挡车器等。竖杆应以地面根部点和直线部分的顶点之间 3D 连线表示,横杆则以水平方向的两端点顶点之间 3D 连线表示。要素的类型、长度、材质、颜色等属性应与实地一致。要素的唯一辩识码要唯一,关联的被支撑物的关系应准确,关联的道路要素的关系应准确。
-
隧道出口或入口轮廓线、收费站检测站通道入口轮廓线,应以 3D 折线表示,一个洞口一条,类型、高度、宽度属性应与实地一致,要素的唯一辩识码要唯一,关联车道要素的关系应准确。
c) 面状要素表达的设施
-
应以3D面表示出迎向车辆来向的过街天桥、立交桥、龙门架、收费站与检测站屋顶的侧面、路侧的广告牌牌面、凸面反射镜,以及公交站顺路方向的展示面、公交站亭的顶面、停车场的充电桩、消防箱、配电箱等设施的轮廓面。立面必须按顺时针方向绘制,正面朝向车辆的来向或平行于车身。类型、材质、颜色等属性信息应与实地一致,要素的唯一辩识码要唯一,关联的道路要素的关系应准确。
-
应以3D面表示出交通信号灯朝向车辆来向的发光面,信号灯要成组,每组含红、黄、绿三个灯头,以一个矩形立面表示,立面必须按顺时针方向绘制,形态类型、用途类型、灯头个数、排列方式等属性信息应与实地一致,要素的唯一辩识码要唯一,关联的车道要素的关系应准确。
-
应以3D矩形面表示出收费站与检测站屋顶的范围面,站点名称、纵向长度、横向宽度、距地面高度、通道数等属性信息应与实地一致,要素的唯一辩识码要唯一,关联的车道要素的关系应准确。
-
应以3D面表示出路面上除交通标线之外的所有设施面,包括敷设在路面的井盖(圆形或矩形统一用矩形框表示)、减速带、安全岛等道路设施。面的边界必须按顺时针方向绘制,类型、材质、颜色等属性信息应与实地一致,要素的唯一辩识码要唯一,关联的道路要素的关系应准确。
d) 体状要素表达的设施
此类要素主要指立交桥、地下停车场等的粗大支撑柱,以立方体的包围盒表示其位置,类型、材质、颜色等属性信息应与实地一致,要素的唯一辩识码要唯一,关联的道路要素的关系应准确。
e) 路侧及路内其他设施的几何位置应与实地一致,绝对精度小于1 m,相对精度小于0.5 m。
6.2.4.2 路内或路侧其他设施检测的错误等级
a) 路内或路侧其他设施的致命错误包括:
-
要求表达的设施成片、成批缺失;
-
设施的几何位置精度成片超出规定的技术要求;
-
设施的各类属性成批不符合规定的技术要求;
-
设施的数据存储格式不符合规范要求,应用软件不能正确读取使用。
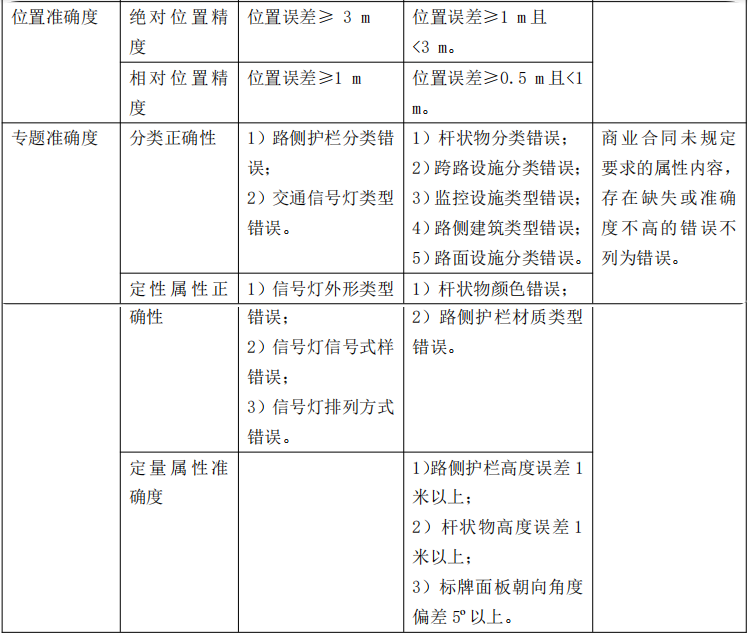
b) 路内或路侧其他设施的严重错误和轻微错误见表7:
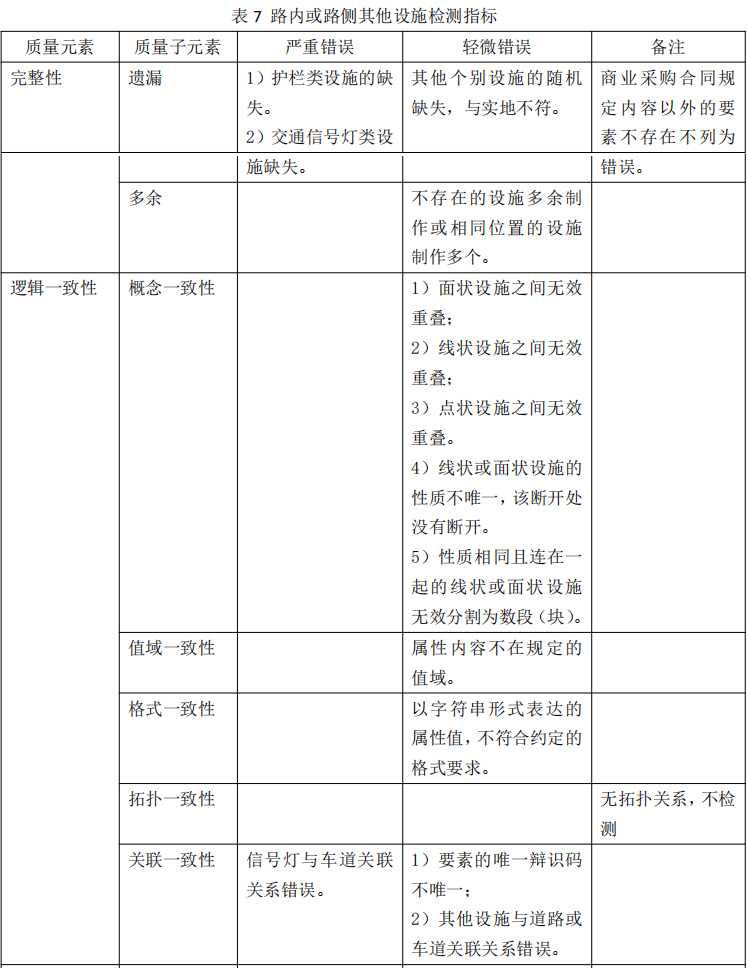
6.2.5 车道交通网络
6.2.5.1 车道交通网络技术要求
车道交通网络是车道中心线线段和结点构成的拓扑连接网络,也包括同一交通流方向的各车道分段成组关系和车道的特殊交通限制条件,供自动驾驶或辅助驾驶车辆完成车道级定位、局部车道级路径规划和引导的交通网络。使用3D点状要素和线状要素表达。具体要求如下:
a) 线状要素表达的车道中心线包含实际车道中心线和虚拟车道中心线两种,在有车道边缘线或车道分界线的路段,几何位置应位于车道中央,横向上距左右边线的距离相等。在无车道边缘线或车道分界线的路口或是收费站、检查站的站前站后广场,应制作虚拟连接车道,几何位置应是车行轨迹的习惯路线,以光滑曲线表示,起点连接至进入路口(广场)的连接车道,末点连接至退出路口(广场)的连接车道。点状要素表达的车道结点应连接进入和退出该点的车道中心线,表示出车道交通网络的拓扑连接关系。车道中心线自身不应存在缠绕现象,相邻车道中心线应平行。
b) 车道中心线和车道结点应与其代表的实地车道或虚拟车道一致,不允许遗漏或多余,不允许前驱后继关系发生混乱。
c) 当车道性质发生变化时,如车道左右侧边线的线型或颜色发生变化、车道的用途发生变化、车道交通流发生分流或合流、车道使用的限制条件发生变化等情况时,应在发生变化处的路段上平齐成组打断车道中心线。
d) 车道中心线自内侧向外侧的车道编号、按用途分类的车道类型、按行车性质分类的车道形态、车道通行状态、车道通行方向、车道内转向箭头标识、车道宽度、车道长度、车道有无特殊限制标识、车道最高限速、车道最低限速等属性应与实地一致,符合规范要求,车道中心线和车道结点的要素辩识码要唯一,车道中心线关联的车道左右侧边线的关系应准确、车道中心线与道路路段的关系应准确。
e) 一段道路上同一交通流方向的各条车道要成组,对通行方向随时间变化的潮汐车道或可以借道超车、借道转向的车道,应按交通流走向重复使用,划分到正反交通流两个车道组。车道组内所含车道数和各车道列表、车道组与前驱后继车道组关系、车道组与道路路段的关系应准确。
f) 有特殊限制条件的车道,如限时公交车道、潮汐车道等,应以条件限制表,准确表达出限制的条件,包括车道辩识码、通行权限、通行方向、限制的车种、限制的时间等属性应与实地一致,符合规范要求。
g) 车道中心线和车道结点的拓扑连接关系应准确,除末段车道的末端点之外,车道结点至少应连接两条车道中心线。
h) 车道中心线和车道结点的几何位置绝对精度小于1 m,相对精度小于0.5 m。
6.2.5.2 车道交通网络检测的错误等级
a) 车道交通网络的致命错误包括:
-
车道中心线成片、成批缺失;
-
车道中心线几何位置精度成片超出规定的技术要求;
-
车道中心线上的各类属性成批不符合规定的技术要求;
-
车道中心线数据存储的格式不符合规范要求,应用软件不能正确读取使用;
b) 车道交通网络的严重错误和微错误等级见表8。
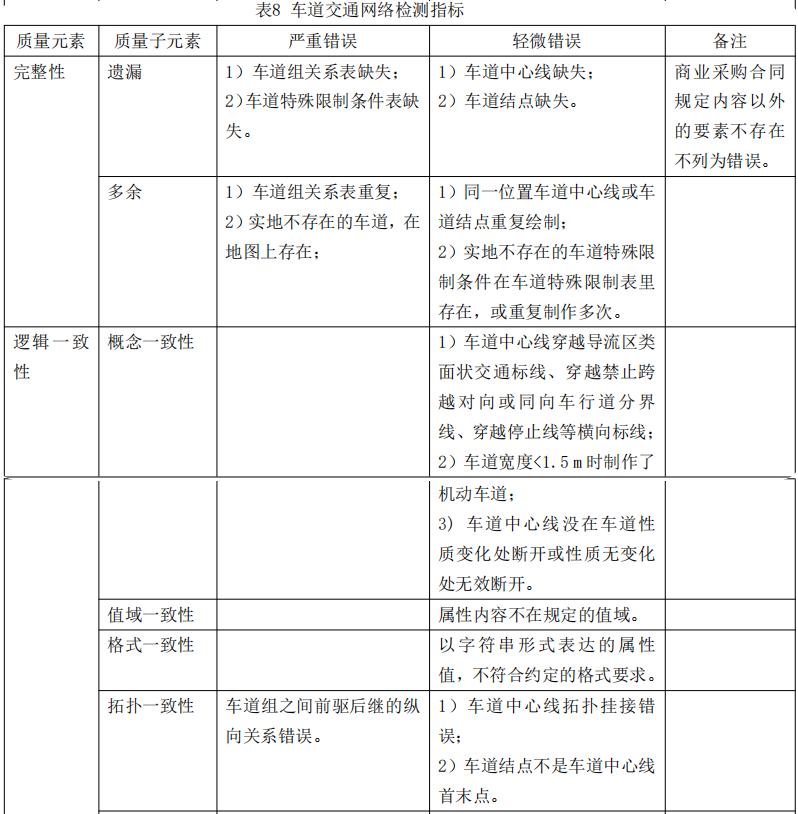

6.2.6 道路交通网络
6.2.6.1 道路交通网络技术要求
道路交通网络是由道路实体参考线、道路虚拟连接线和道路结点构成的拓扑连接网络,也包括以面要素表达的路段面和路口面。不同于供普通导航的标准地图,它除提供对标准地图道路路段的关联关系和道路的最基本属性之外,还提供自动驾驶、辅助驾驶特需的纵坡、横坡、曲率和航向角属性,供自动驾驶或辅助驾驶车辆完成道路级定位、控制、规划和引导的决策。使用3D点状要素、线状要素和面状要素表达。在无特殊场景说明的情况下,本文件所称道路参考线包括道路实体参考线和道路虚拟连接线两类,具体要求如下:
a) 在有道路交通标线约束的普通路段,道路参考线应位于内侧车道的外边界,道路参考面应是单向行驶路面的内侧和外侧边界之间的区域,纵向两端的边界应垂直于道路的走向。道路结点应是道路参考线的首末端点。几何位置横向绝对误差<1 m,纵向绝对误差<3 m。
b) 在转向专用道、出入口、掉头口、匝道等起连接性质的路段,道路参考线应位于该路段的中央,道路参考面应是单向行驶路面的内侧和外侧边界之间的区域,纵向两端的边界应垂直于道路的走向。道路结点应是道路参考线的首末端点。
c) 在无道路交通标线的路口,道路参考线专指道路虚拟连接线,应以圆滑的曲线,连接进入路口的道路参考线和退出路口的道路参考线。当路口是带有主辅路关系的复杂路口时,从主路引出的道路虚拟连接线要分别连接到退出路口的主路和辅路,从辅路引出的道路虚拟连接线要分别连接到退出路口的辅路和主路。路口参考面为路口前的停止线(让行线)及其延伸线所围的区域。
d) 道路参考线上形状点之间的距离大于5 m时,要以5 m为间隔内插形状点,并在内插后的所有形状点上计算给出纵坡、横坡、曲率、航向属性。
e) 道路参考线和道路结点应与其代表的实地路段行车路线或路口的行车路线一致,不允许遗漏或多余,不允许前驱后继关系发生混乱。
f) 当道路的性质发生变化时,如道路的宽度、道路上的车道数、道路的通行限制条件、道路的建筑结构等发生变化时,应垂直道路方向打断道路参考线,同时路段面也做相应的打断。路段面和路段面之间、路段面和路口面之间边界应紧密一致,不允许出现裂隙或重叠。
g) 道路参考线的类型、功能等级、形态、通行方向、车道数、建筑结构、路面材质、宽度、长度等属性及对车辆的限高、限重、限宽、限长、限速等限制条件应与实地一致,符合规范要求。
道路参考线和道路结点的要素辩识码应唯一,关联的标准地图道路网关系应准确、道路参考线和道路结点的拓扑连接关系应准确,除末段道路的末端点之外,道路结点至少应连接两条道路参考线。
6.2.6.2 道路交通网络检测的错误等级
a) 道路交通网络的致命错误包括:
-
道路参考线或虚拟连接线成片、成批缺失;
-
道路参考线或虚拟连接线几何位置精度成片超出规定的技术要求;
-
道路参考线或虚拟连接线上的各类属性成批不符合规定的技术要求;
-
道路参考线或虚拟连接线数据存储的格式不符合规范要求,应用软件不能正确读取使用;
-
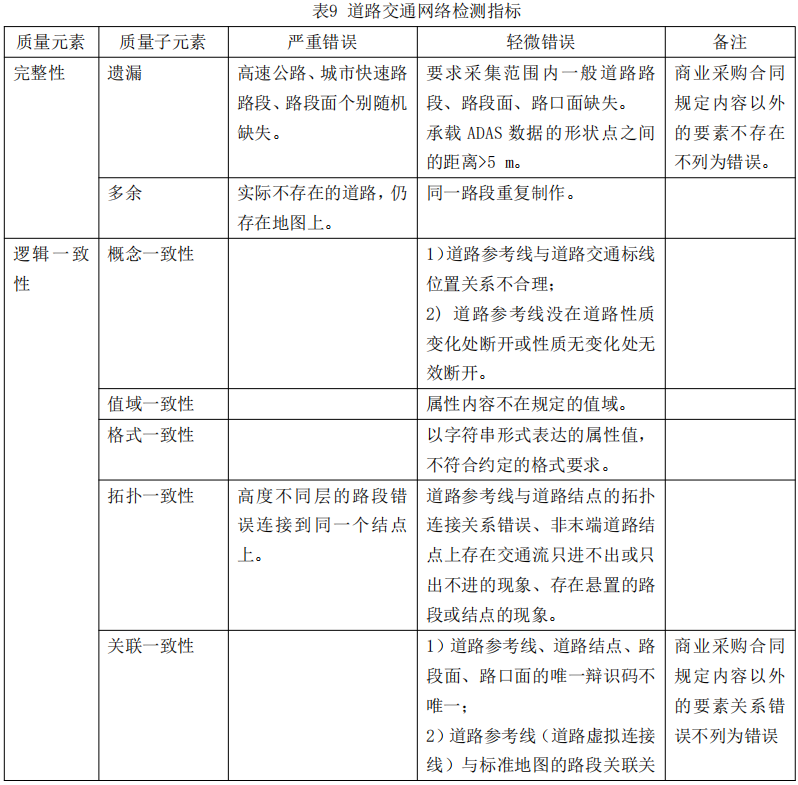
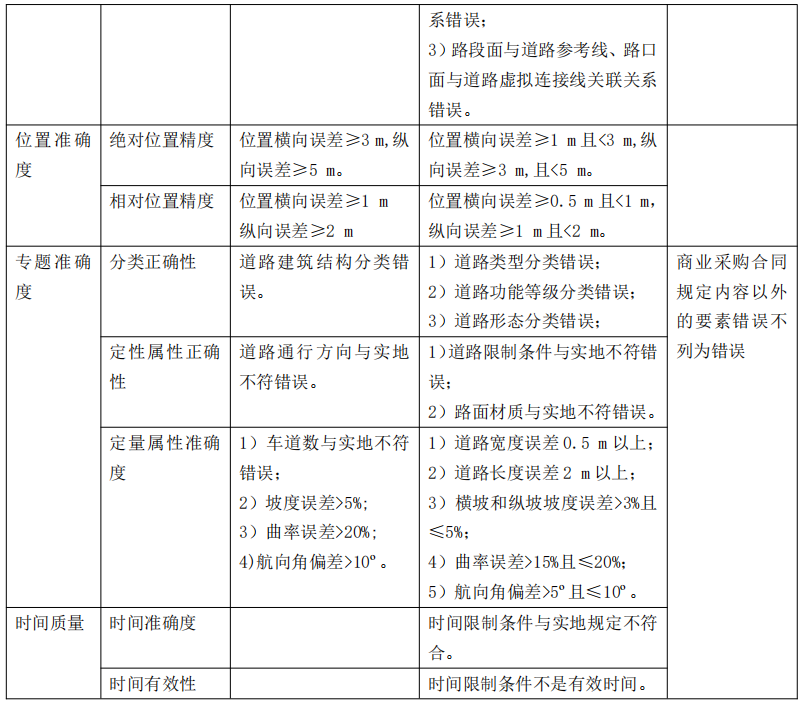
成片路段上的ADAS数据缺失。
b) 道路交通网络的严重错误和轻微错误见表9。
7 数据质量评分
7.1 概述
数据质量评分是以量化的方式对数据质量做出检测,适用于可量化检测的要素专题。不同的检测对象有不同的计分方法,最基础的质量分值是大类要素专题得分,单元产品质量分值是单元内各大类要素专题得分的总合,检验批的质量分值是检验批内被检测单元产品质量得分的算术平均值。
质量分数线简单划分为合格与不合格,依据检测目的不同,可以在合格产品中进一步区分出优秀产品与合格产品。
7.2 质量等级的划分
自动驾驶地图数据质量检测过程中,依据对自动驾驶影响的严重程度,应按照以下规则对数据质量等级进行划分评定:
a) 地图数据定性检测过程中,当发现一项不合格时,则判断整体数据不合格,不再进行定量数据的检测;
b) 地图数据定量检测过程中,当发现数据存在致命错误时,则判断该单元产品不合格。
c) 自动驾驶地图数据质量等级划分采用百分制, 90分为合格分数线,95分及以上为优秀产品,满分为100分。
d) 检验批中所含的所有单元产品的质量得分都要大于等于90分,否则判定该检验批为不合格产品。
7.3 各类要素质量分值占比
一个被检测的自动驾驶地图数据单元产品总分设为100分, 由各个专题要素所占分值累加而成.各专题要素所占分值依据其对自动驾驶车辆影响程度划分,见表10:
表10 要素专题质量分值表
| 评定内容 | 质量最高分值 p |
|---|---|
| 道路交通标线 | 25 |
| 道路交通标志 | 20 |
| 路侧及路内其它设施 | 15 |
| 车道交通网络 | 30 |
| 道路交通网络 | 10 |
当某些商业订单采购的产品数据中不含某些要素专题时,计算质量最高分值时,应将不含的要素专题分值平均配赋到存在的要素专题中,见表11:
表11 缺道路交通网络要素的分值表
| 评定内容 | 质量最高分值 p |
|---|---|
| 道路交通标线 | 27.5 |
| 道路交通标志 | 22.5 |
| 路侧及路内其它设施 | 17.5 |
| 车道交通网络 | 32.5 |
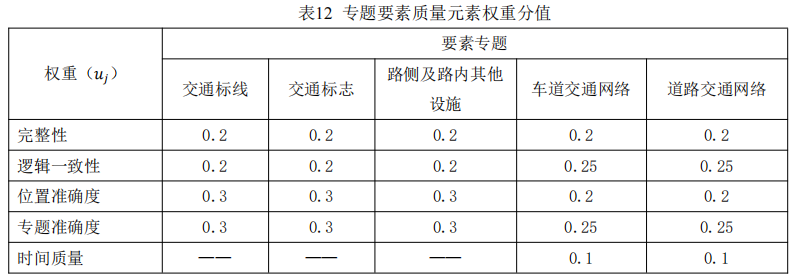
各专题要素质量元素权重分值见表12,权重分值可依据不同质量评估目的进行调整。
7.4 各类要素质量计分方法
每类要素的质量得分体现在要素的错误率,无错误的数据为满分。
参与质量评分的错误分严重错误和轻微错误,本文件规定一个严重错误折合5个轻微错误。
错误率是被抽样数据中的轻微错误个数与样本总量的比值,用下式表达:
r = n / N (7-1)
式中:
r——被检样本数据中某类要素某个质量元素轻微错误的错误率;
n——被检样本数据中某类要素中某个质量元素有轻微错误的个数;
N——被检样本数据中某类要素的记录总数。
每类要素的质量得分依检测出的错误记录采用扣分制,各类要素的质量最高分值见表10,各类要素的质量元素权重分值见表12,按下式计算:
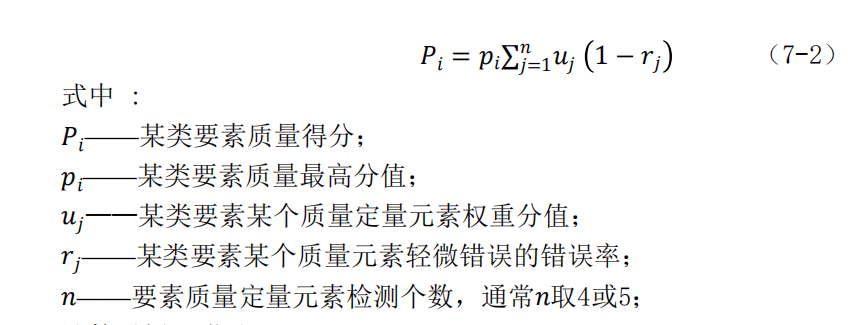
计算示例见附录C。
这种基于被检数据要素个数统计的错误率,也可以折算成基于道路里程的错误率,具体计算方法见附录D,本文件不做规范性要求。
7.5 单元产品质量评定
一个被检测的单元产品的质量得分等于该单元产品里的各类要素质量得分的总和,用下式表达:

式中:
S——为单元产品质量得分;
P——为单元产品中的某类专题要素的质量得分,共五类专题要素。
7.6 检验批成果质量评定
一个检验批由多个被检测的数据单元产品构成,其成果质量的判定原则如下:
a) 当一个单元产品不合格时,应判定该检验批整体不合格。
b) 当检验批所含的各个单元产品都合格,该检验批的整体质量得分为各个单元产品质量得分的算术平均值,用下式表示:

式中:
A----为被检批次数据质量得分;
m----为被检批次内被抽检的单元产品个数;
S——为被抽检的单元产品质量得分。
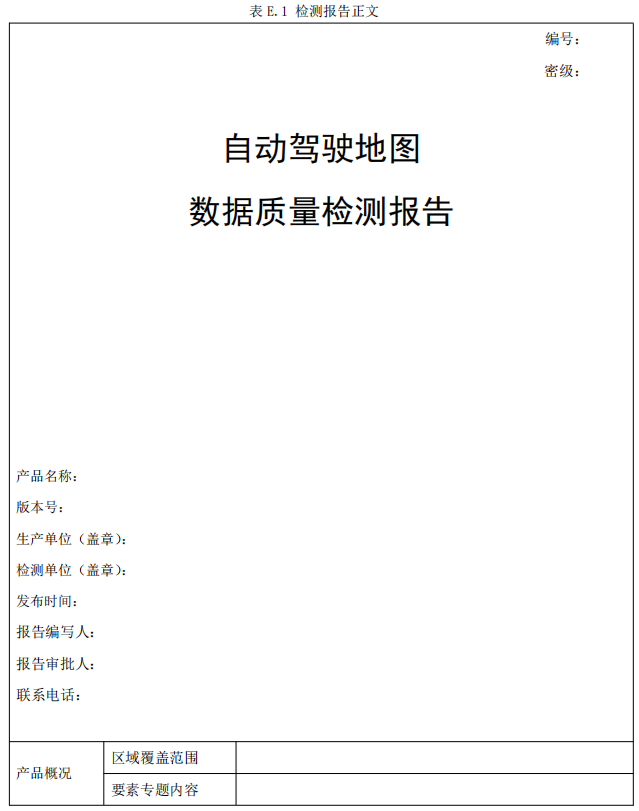
8 数据质量检测报告
8.1 概述
自动驾驶地图数据质量检测报告是地图数据生产商向地图数据应用方提供数据服务时的基本说明文件,是整个地图数据质量检测活动的总结,是地图数据生产商对其所生产的数据给予的质量证明,是数据采购应用方对数据质量验收的依据。数据质量检测报告由正文和附表组成。
8.2 数据质量检测报告正文
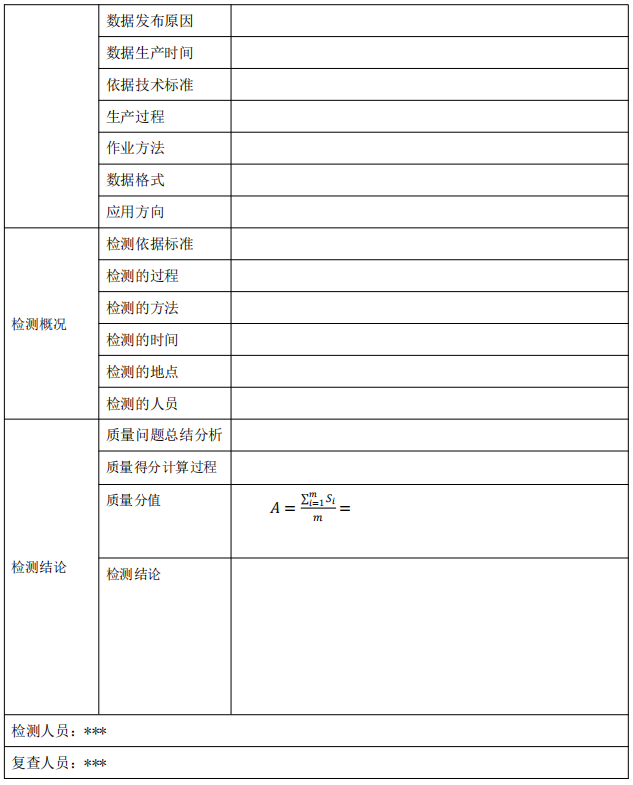
自动驾驶地图数据质量检测报告正文至少应包括如下内容:
a) 产品名称,给出被检数据产品的名称、版本号、生产单位、检测单位、报告时间;
b) 产品概况,给出被检数据的地理覆盖范围、要素专题内容、生产时间、依据标准、生产过程和手段、生产人员、数据格式、应用方向等;
c) 检测概况,给出被检数据进行质量检测的时间、检测的地点、检测的人员、检测的过程、检测的方法、检测的依据;
d) 检测结论,给出被检数据中发现质量问题的总结和分析,数据质量得分的计算过程和最终的质量分值和结论。
具体格式见附录E。
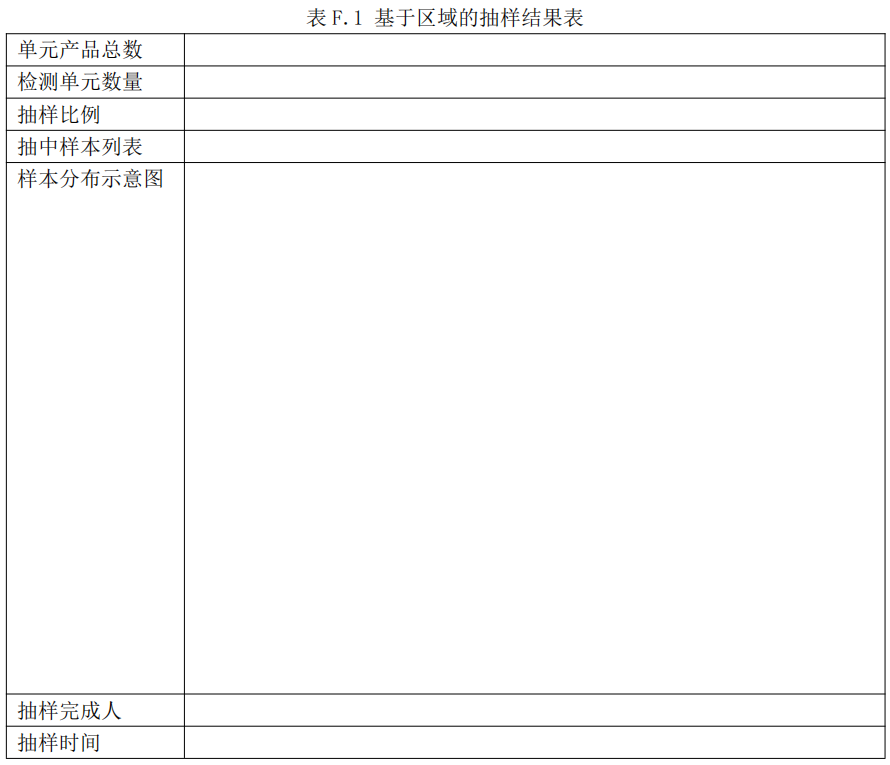
8.3 数据质量检测报告附件
自动驾驶地图数据质量检测报告的附件配合正文使用,应以表格的形式给出如下内容:
a) 基于区域的抽样结果列表,表中应说明被检数据批次中包含的单元产品个数,被抽中的单元产品所占比例和名称列表,宜配绘被检区域样本分布示意图。
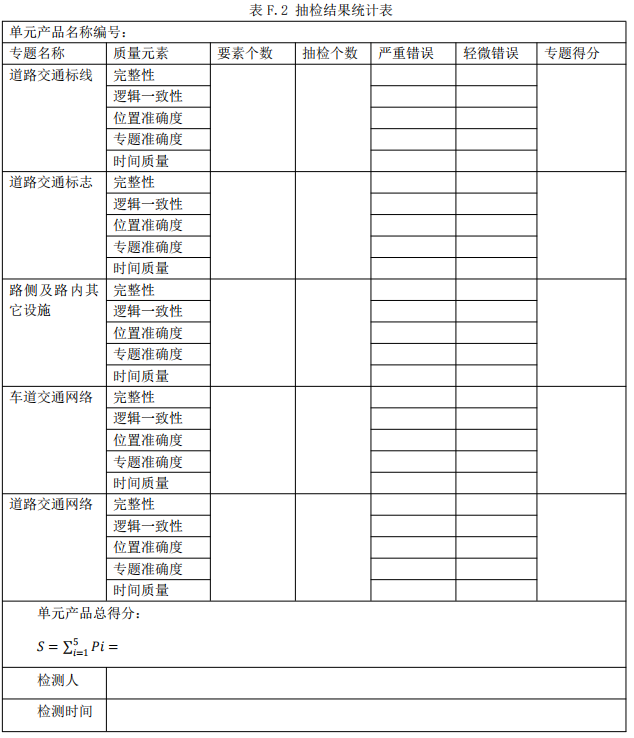
b) 基于要素的抽样结果和质检结果列表,表中应说明每大类要素统计出的记录个数、被抽样进行质检的记录个数、发现的严重错误个数、发现的轻微错误个数,质量的得分。每个被检数据单元一份。
具体格式见附录 F。
附 录 A(资料性)抽样检验方法
A.1 概述
本附录的抽样检验方法主要由采购方或采购方代表组织实施,有关产品质量标准、检验水平、接收质量限或其他细则,应在合同或有关文件中做出具体规定。也可用于生产单位对自己生产的产品所进行的抽样检验,在生产过程中或者在产品提交时进行。
A.2 样本量
一个检验批是被检自动驾驶地图数据的整体,以地理区域划分的各个数据集是被检测的单元产品,单元产品里的各类要素记录或其属性是被检测的最小单位产品。确定样本量有两个步骤:
a) 统计检验批里单元产品个数(批量),确定抽检的单元产品样本量。
b) 统计单元产品里的各类要素的记录个数(批量),确定抽检的单位产品样本量。
A.3 抽样策略
抽样方法可分为判断抽样法和概率抽样法两大类,针对自动驾驶地图的特点,本附录只采用概率抽样法,样本必须代表批,需要的样本应是随机的而非有偏的。
概率抽样的基本特征是,整体中的每个成员都有固定的概率被抽中。当使用概率抽样时,可以对整体进行统计推断。概率抽样一般可分为简单随机抽样、分层随机抽样、系统抽样三种。
A.3.1 简单随机抽样
简单随机抽样使用随机数来选择样本,总体中每个对象被抽取的概率相同。在总体质量均匀的情况下,应使用简单随机抽样。
A.3.2 分层随机抽样
当批由子批或层组成时,应使用按比例配置的分层抽样,在此情形下,各子批或各层的样本量与其大小成比例。对于同一个整体,这种抽样策略在均值估计和方差方面比非分层策略具有更高的精度。
A.3.3 系统抽样
系统抽样是一种半随机抽样方法,先将地图数据整体进行相同大小的格网划分,然后按照空间均匀分布的要求选取格网(即单元抽样),接着在格网内部随机选取一定比例(或全部)的单位产品,这种方法提供了一种确保样本在空间上均匀分布的抽样方式。
A.4 抽样检验标准
A.4.1 简介
本附录所描述的是验收抽样检验,其目的是根据抽样检验结果对批做出接收或不接收的判断,其理论基础是小概率事件原理和假设检验。
A.4.2 抽样检验步骤
A.4.2.1 规定产品质量标准
产品质量标准,是对产品质量的具体要求,需明确区分单位产品合格与不合格或每个质量特征构成不合格的标准。
A.4.2.2 确定批量
批的组成、批量大小应考虑生产过程和生产的实际情况,注意一致性问题。同一批作业人员、同一时间段、同一技术手段生产的数据产品宜划为一个批次。
A.4.2.3 规定检验水平
应参考各方面因素确定合理的检验水平。生产初期,应选择较高的检验水平,或100%检验。若产品质量已达较好水平且可控,宜选择较低检验水平。在没有特殊规定时,一般使用检验水平II。
A.4.2.4 确定接收质量限 AQL
检验方案的严格程度主要决定于AQL的大小,常用方法是根据产品不合格类别,分别规定AQL值。由于自动驾驶地图数据的复杂性,具有很多独立的质量特征,可以对这些需要单独检验的质量特征所构成的不合格分别规定AQL值。
A.4.2.5 确定方案类型
对于一次、二次和多次类型抽样,在AQL、字码和严格性相同时,其具有基本相同的抽查效果,考虑到自动驾驶地图数据及其生产过程的复杂性,管理复杂度高,宜采用一次抽样类型。
A.4.2.6 确定抽样方案
当 AQL 值、检验水平和批量确定以后,在相应的抽样方案表中,检索所需要的抽样方案,步骤如下:
a) 根据批量和检验水平,按表 A.1 左半部检索出字码。
b) 根据字码和规定的 AQL 值以及规定的方案类型,在表 A.1 右半部,检索出抽样方案。
如要素 A,批量为 400,AQL 为 1.0,通过批量查询一般检验水平 II 的样本字码为 H,H 行与 AQL1.0列相交处为(1 2),即抽取 50 个样本进行检验,不合格品小于等于 1 时接收,否则拒收。
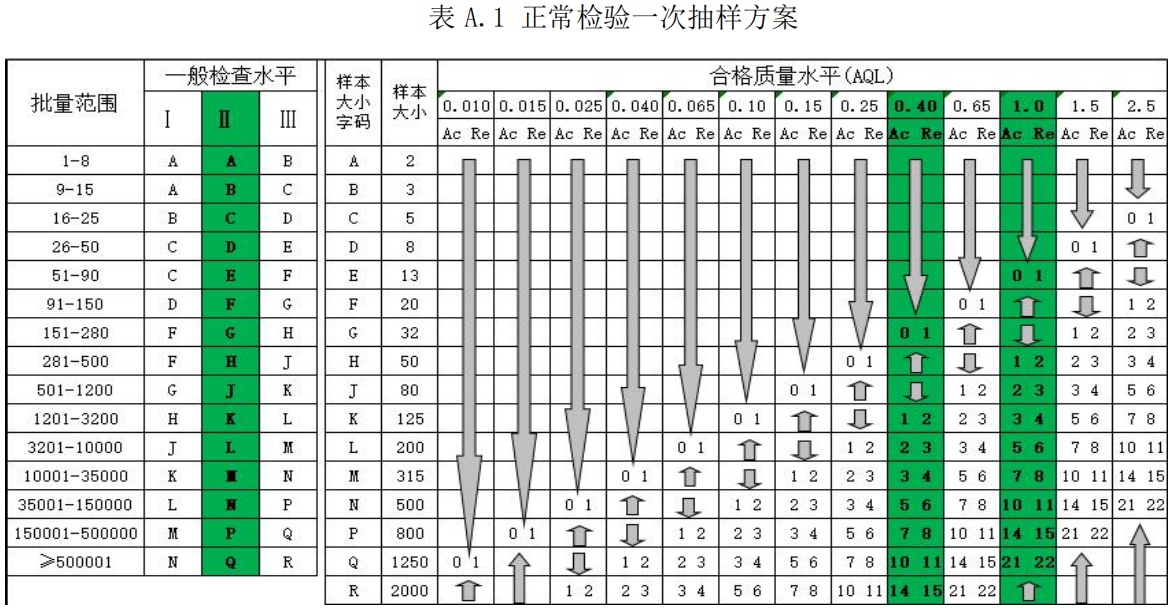
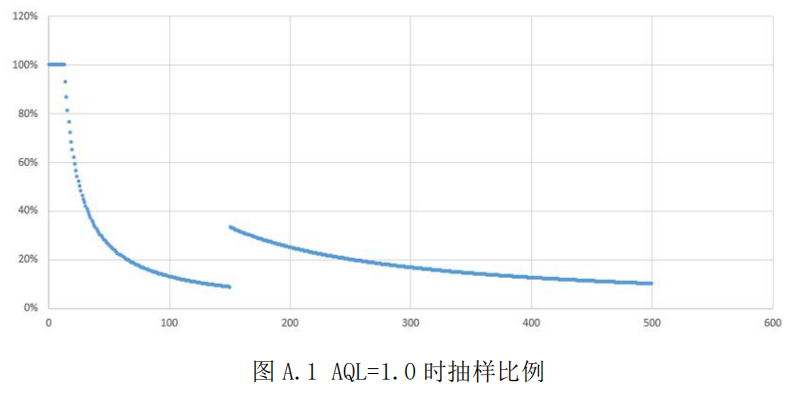
从上表可以看出,不同批量和 AQL 的组合下,其抽样比例有所不同,在一个档位区间内也会发生变化,以一般检验水平 II 级,AQL=1.0 的抽样方案举例,其抽样比例曲线如图 A.1。
A.4.2.7 检验判定
按抽样方案规定的样本量随机抽取样本,对样本逐个检验,检验中发现的不合格品数,与方案规定的判定数组进行比对就可以对批做出判定。
如果产品包含严重错误和轻微错误引起的不合格,其中任何一类不符合接收数要求,都不能判定接收,只有当各个类别发现的不合格品都能满足各自抽样方案接收数的要求时,才能对批做出接收的判定。
A.4.2.8 批的再提交和不合格品处理
再提交批,就是已经被拒收,经过 100%检验,发现了所有不合格品,并修改/替换为合格品以后,允许再次提交的批。允许再次提交的批,最低限度也应对导致批被拒收的那一类不合格进行检验。在重新检验过程中,如果发现单位产品还有其他类别的不合格,也应作为不合格品看待。如果返工可能引起其它类别的不合格,都应进行检验。
除此以外,其它类别的不合格是否还要进行检验,采取正常还是加严检验,由负责部门确定,但不允许采用放宽检验。再提交批如果又一次被拒收,该批的处理方式由生产方与使用方协商确定。
附 录 B(资料性)制图精度检测方法
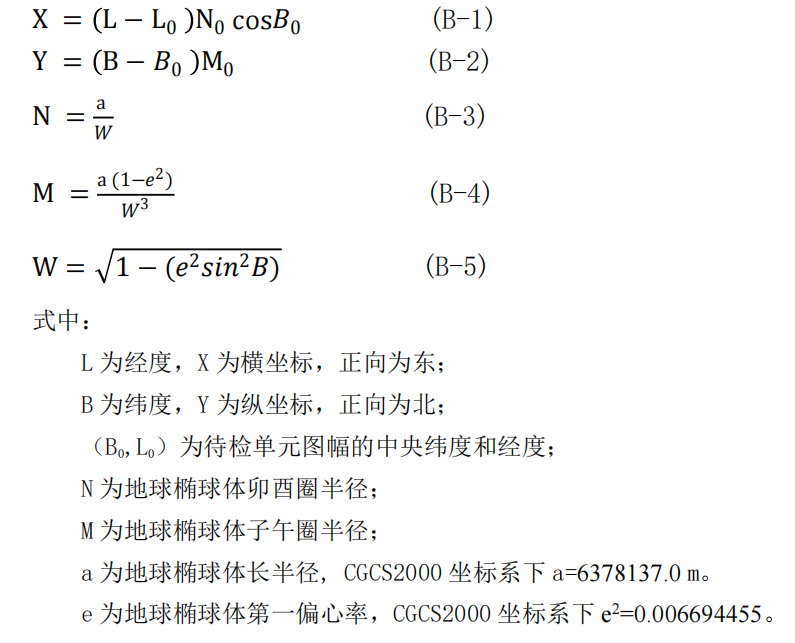
B.1 大地坐标至投影平面坐标的变换
自动驾驶地图要素的几何位置以经度、纬度和高程表示,应将其投影到地图平面上再进行精度误差的计算。为简化计算起见,宜采用平面图的投影方式,高程值保持不变,计算公式如下:
B.2 单点绝对位置误差计算

B.3 点对相对位置误差计算
B.4 均方根误差计算
设待检单元内位置准确度检测所选取坐标点个数为 n,点对匹配数 m。
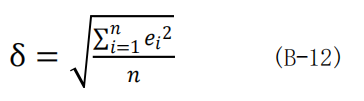
待检单元内单点的位置误差为 e,则整体绝对精度为此组误差的均方根误差δ,用下式表示:
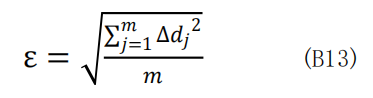
待检单元内各点对的相对位置误差为 d,则整体相对精度为此组误差的均方根误差ε,用下式表示:
附 录 C(资料性)道路交通网络错误率计算示例
一个单元产品里对道路交通网络数据抽取了1000个样品,发现有完整性轻微错误6个,逻辑一致性轻微错误8个,位置准确度轻微错误5个,专题准确度严重错误1个、轻微错误1个,时间质量轻微错误2个,则按式(6-1)计算,各类质量元素上的错误率为:
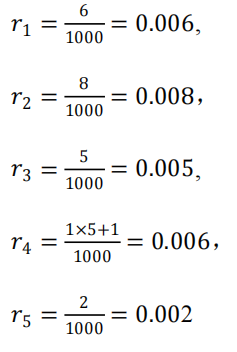
按式(6-2)计算,一个单元产品里道路交通网络的质量得分为:
10×(0.2×(1-0.006)+0.25×(1-0.008)+0.2×(1-0.005)+0.25×(1-0.006)+0.1×(1-0.002))=9.941
附 录 D(资料性)基于道路里程的错误率计算及评分
D.1 概述
被检数据发现的错误可以归纳为两大类,一类是要素的几何位置错误,一类是要素的属性或关系错误,错误都可以根据要素自身的道路ID或关联的道路ID关联到发生的路段。路段按类型可以分为两大类,一类是封闭性的高速公路和城市快速路,另一类是开放的社会性道路或园区、院区、停车场等的内部道路。基于道路里程的错误率应对不同道路类型进行不同的统计。
D.2 道路里程计算
本文件所指道路里程专指道路交通网络中路段的长度,对双向道路应绘制正反两条路段。一个单元产品抽样后的被检数据应按照道路交通网络专题数据中的各要素的类型属性和长度属性分别计算封闭道路和开放道路的总长度,计算公式如下:

式中:
L为被检道路交通网络数据中一路段的道路长度属性,单位:km;
M为道路的总里程,单位:km;
n为被检道路交通网络数据中某类道路路段的个数;
i为道路类型标号,i=1为封闭道路,i=2为开放道路。
D.3 基于道路里程错误率计算
该错误率是指被抽样数据中某类道路上发生轻微错误个数与该类道路里程的比值。道路类型分封闭道路和开放道路,用下式表达:
发生的严重错误,按1:5的方式折算。
基于道路里程的错误率是质检过程中的一个中间成果,可以单独作为质量判定的依据,一般规定:
a) 封闭性道路上每大类专题要素轻微错误百公里小于5个,总体小于20个为合格;
b) 开放性道路上每大类专题要素轻微错误百公里小于20个,总体小于95个为合格;
c) 封闭性道路和开放性道路均合格整体才判为合格。
附 录 E(资料性)数据质量检测报告正文示例
附 录 F(资料性)数据质量检测报告附件示例
F.1 基于区域的抽样
F.2 基于要素的抽检结果
检验批在完成基于区域的抽样之后,应对每个被检单元产品进行基于要素的抽样。每个被检单元产品的抽检结果不存在致命错误时,以表F.2给出抽检结果记录,存在致命错误时不再按表F.2进行错误统计,只给不合格。
参 考 文 献
[1] GB/T 21336-2008 地理信息 质量评价过程
[2] GB/T 21337-2008 地理信息 质量原则
[3] GB/T 28441-2012 车载导航电子地图数据质量规范
[4] GB/T 39263-2020 道路车辆 先进驾驶辅助系统(ADAS)术语及定义
[5] GB/T 39623-2020 基础地理信息数据库系统质量测试与评价
[6] GB/T 40429-2021 汽车驾驶自动化分级
[7] GB 50688-2011 城市道路交通设施设计规范
[8] CH/T 1019—2010 导航电子地图检测规范
[9] DB11/T 1880-2021 自动驾驶地图特征定位数据技术规范
[10] DB43/T 1769-2020 机载倾斜摄影三维地理信息模型数据成果质量检验技术规程
[11] T/CSAE 125-2020 智能网联汽车测试场设计技术要求
[12] ISO 20524-2 2020,Intelligent transport systems — Geographic Data Files (GDF) GDF5.1 — Part 2: Map data used in automated driving systems, Cooperative ITS, and multi-modaltransport
[13] Navigation Data Standard Format Specification,NDS Version 2.5.4
[14] ADASIS v3 Protocol Specifications 3.1.0.RC1
[15] 地理信息系统名词(第 2 版),地理信息系统名词审定委员会,北京:科学出版社,2012