如何编写一个驱动程序:
(1)确定主设备号
(2)定义自己的file_operations结构体:
包含对应的open(drv_open)/read(drv_read)等设备操作函数,需要到内核中去注册
(3)实现对应的open/read/write等函数,填入file_operations结构体
(4)把file_operations结构体告诉内核:注册驱动程序
要把file_operations结构体注册到内核中,应用程序才能调用对应的操作函数
(5)谁来注册驱动程序啊?得由一个入口函数:安装设备驱动程序时,就会去调用这个入口函数
用register_chrdev(major(设备号),file_operations)
注册的设备放入chrdevs[ ]数组里记录
(6)有入口函数就应该有出口函数:卸载驱动程序时,会去调用这个出口函数
用unregister_chardev( )
从chrdevs[ ]数组中去掉该设备
(7)其他完善“提供设备信息,自动创建设备节点
设备节点创建:class_create、device_create
每一步的代码详解
驱动框架:最简单的驱动程序-单个LED
1、字符设备名字在注册设备号时指定:“100ask_led”
![]()
字符设备驱动注册
register_chrdev(unsigned int major, const char *name, const struct file_operations *fops)
第一个参数:主设备号,0由系统分配
第二个参数:字符设备名字
第三个参数:要注册的file_operation结构体
返回值:major为0时,返回一个自动分配的设备号

设备号分配为240
2、类和设备节点创建
类:同一个类别的设备,比如led中的led0、led1
设备节点:具体有几个设备,通过对具体的设备节点操作
每个设备节点都是一个文件,对设备的操作也是对文件的读取和写入

(1)设备类创建:
class_create(struct module *owner, const char *name)
第一个参数:拥有这个类的指针,‘THIS_MODULE’宏,代表当前加载的模块
第二参数:设备类名字。该名字位于/sys/class目录下。
是udev等用户空间工具用来识别和操作设备的关键标识。

sys/class中可以查看已经创建的类
(2)设备节点创建:
device_create(struct class *class, struct device *parent,
dev_t devt, void *drvdata, const char *fmt, ...)
第一个参数:设备类的指针
第二个参数:父设备的指针,一般为NULL
第三个参数:设备类型和编号的组成,MKDEV宏生成,代表设备的主设备号和次设备号
第四个参数:用于传递数据,可设为NULL。
第五个参数:设备节点的名字
![]()
/dev/中可查看创建的设备
3、字符设备驱动、设备类、设备节点的销毁

(1)设备节点销毁
device_destroy():第一个参数,设备类指针,哪个设备类。第二个参数:MKDEV宏,指定设备的主设备号和次设备号
(2)设备类销毁
class_destroy():第一个参数,设备类指针。
(3)设备驱动销毁
unregister_chrdev():第一个参数,要销毁的主设备号,第二个参数,字符设备名字
4、寄存器变量:
(1)寄存器变量定义

volatile防止编译器优化
定义的变量为指针(地址),赋值的值就是指向一个地址
(2)寄存器变量映射

映射到实际的地址空间中
ioremap():
第一个参数:需要映射的物理地址起始点
第二个参数:要映射的内存区域大小,单位字节
(3)对寄存器的操作


5、file_operation函数
(1)结构体成员初始化

操作符(.)用于访问结构体的成员,.fb_fillrect = cfb_fillrect这行代码是在初始化一个结构体时使用的语法,这种语法特别用于结构体的直接初始化。
在C语言中,当你使用一个函数的名称而不加任何括号时,你实际上是在引用那个函数的地址。(即函数名作为地址使用)
结构体在内核中的定义:
struct file_operations {
struct module *owner;
ssize_t (*write)(struct file *, const char __user *, size_t, loff_t *);
int (*open)(struct inode *, struct file *);
// 其他成员...
};
(2)成员变量初始化的函数:
![]()

a、设备打开操作函数
led_open():
第一个参数:指向‘inode’结构体
‘inode’中记录了文件数据本身外的所有信息,比如文件权限、文件大小等
‘inode’结构体可以获取主、次设备号
通过‘inode’的‘i_cdev’字段,驱动可以访问与设备相关联的‘cdev’结构,该结构 包含设备的核心信息和操作
第二个参数:指向‘struct file’结构体的指针,表示用户打开的文件描述符。
该结构体是用户程序与内核之间的关键接口。
b、写操作函数:
led_write():
第一个参数:指向‘struct file’结构体的指针,表示打开的文件对象
其中的‘private_data’字段可用来存储特定于设备的数据
第二个参数:要写入设备的数据缓冲区
第三个参数:buf的数据字节数
第四个参数:文件当前位置的偏移量(不支持寻址的设备不重要)
6、应用层:
argc:传递给程序的参数总数
argv:指针数组,每个元素指向一个字符数组的指针(字符串)
![]()
argv[1]:/dev/myled 设备节点名字
fd:文件描述符,整数,标识要写入的文件或设备

argv[2]:on
fd:文件描述符
&status:指向数据缓冲区的指针
Count:要写入的字节数,指定‘buf’中有多少数据
驱动代码:led_drv.c
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/delay.h>
#include <linux/poll.h>
#include <linux/mutex.h>
#include <linux/wait.h>
#include <asm/uaccess.h>
#include <linux/device.h>
#include <asm/io.h>static int major;
static struct class *led_class;/* registers */
//IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3地址:0x02290000 + 0x14
static volatile unsigned int *IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3;//GPIO5_GDIR地址:0x020AC004
static volatile unsigned int *GPIO5_GDIR;//GPIO5_DR地址:0x020AC000
static volatile unsigned int *GPIO5_DR;static ssize_t led_write(struct file *filp, const char __user *buf,size_t count, loff_t *ppos)
{char val;int ret;/* copy_from_user : get data from app */ret = copy_from_user(&val, buf, 1);/* to set gpio register: out 1/0 */if(val){/* set gpio to let led on */*GPIO5_DR &= ~(1<<3); //输出低电平,根据原理图低电平点亮}else{/* set gpio to let led off */*GPIO5_DR |= (1<<3); //输出高电平}return 1;
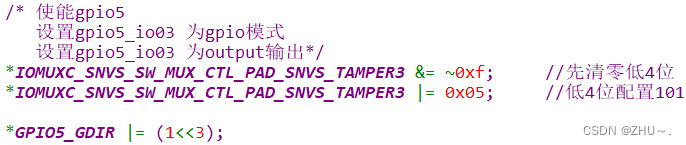
}static int led_open(struct inode *inode, struct file *filp){/* enable gpio5* configure gpio5_io3 as gpio* configure gpio5_io3 as output */*IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3 &= ~0xf; //先清零低4位*IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3 |= 0x05; //低4位配置101*GPIO5_GDIR |= (1<<3);return 0;}static struct file_operations led_fops = {.owner = THIS_MODULE,.write = led_write,.open = led_open,
};
/* 入口函数 */
static int __init led_init(void)
{printk("%s %s %d/n", __FILE__, __FUNCTION__, __LINE__);/* 加载字符驱动 */major = register_chrdev(0, "100ask_led", &led_fops);/* ioremap *///IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3地址:0x02290000 + 0x14IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3 = ioremap(0x02290000 + 0x14, 4); //映射4个字节//GPIO5_GDIR地址:0x020AC004GPIO5_GDIR = ioremap(0x020AC004, 4);//GPIO5_DR地址:0x020AC000GPIO5_DR = ioremap(0x020AC000, 4);/* 创建设备节点 */led_class = class_create(THIS_MODULE, "myled"); //要在THIS_MODULE下创建类device_create(led_class, NULL, MKDEV(major, 0), NULL, "myled0");//device_create(led_class, NULL, MKDEV(major, 1), NULL, "myled1");return 0;
}static void __exit led_exit(void)
{/* iounmap */iounmap(IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3);iounmap(GPIO5_GDIR);iounmap(GPIO5_DR);/* 销毁设备节点 */device_destroy(led_class, MKDEV(major, 0));class_destroy(led_class);/* 销毁字符设备驱动 */unregister_chrdev(major, "100ask_led");
}module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");应用代码:ledtest.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <string.h>
#include <unistd.h>
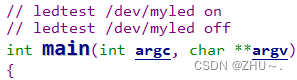
#include <stdio.h>// ledtest /dev/myled0 on
// ledtest /dev/myled0 offint main(int argc, char **argv)
{int fd;char status = 0;if(argc != 3){printf("Usage: %s <dev> <on/off>\n", argv[0]);printf(" eg: %s /dev/myled0 on\n", argv[0]);printf(" eg: %s /dev/myled0 off\n", argv[0]);return -1;}//openfd = open(argv[1], O_RDWR);if (fd < 0){printf("can not open %s \n", argv[0]);}//writeif(strcmp(argv[2], "on")==0){status = 1;}write(fd, &status, 1);return 0;
}
多个按键:
要对GPIO5_1和GPIO4_14配置(key1和key2)
1、定义GPIO通用设置的结构体(按照手册中寄存器的位置)

(1)GPIO_DR:Data register
数据寄存器(读取或写入GPIO引脚当前状态)
(2)GPIO_GDIR:GPIO direction
方向寄存器(配置GPIO输入或输出)
(3)GPIO_PSR:Pad sample register
读取GPIO引脚当前状态(高电平或低电平)
(4)GPIO_ICR1, GPIO_ICR2:Interrupt control registers
终端控制寄存器(配置GPIO引脚终端触发方式和其他中断相关设置)
(5)GPIO_EDGE_SEL:Edge select register
边沿选择寄存器(配置GPIO引脚的边沿触发类型)
(6)GPIO_IMR:Interrupt mask register
中断屏蔽寄存器(配置哪些GPIO引脚中断应该被屏蔽)
(7)GPIO_ISR:Interrupt status register
中断状态寄存器(显示当前GPIO引脚的中断状态)
2、配置过程:
(1)定义要寄存器变量(要修改的寄存器)
GPIO时钟使能、GPIO模式配置、GPIO模式下引脚配置

(2)手册中找到相应的地址,重映射

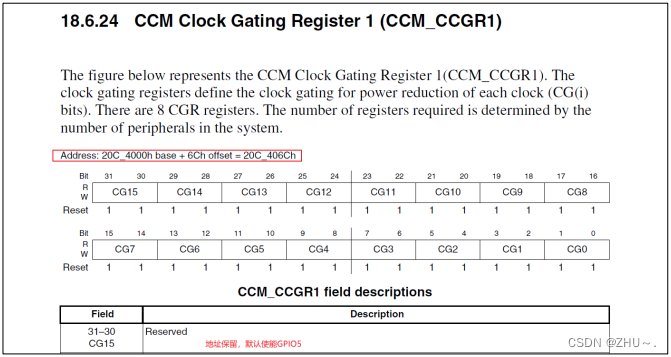
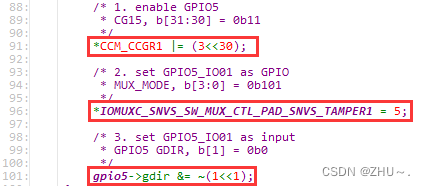
CCM_CCGR1中30-31为默认保留位,默认使能GPIO5
CCM_CCGR3中12-13位为gpio_4的时钟配置



对GPIO各寄存器的映射(按照地址顺序下来,只需要找到首个寄存器GPIOxx_DR的地址就好)

(3)给寄存器赋值

时钟配置11,第30、31位:(3<<30),对gpio的访问,从结构体中找到对应的成员变量即可


Linux内核中因为MMU的存在不能直接访问物理地址,需要通过ioremap把虚拟地址映射到对应的物理地址,我们对虚拟地址的访问,会自动修改到对应的物理地址。而结构体寄存器会映射整块对应大小的内存,里面的虚拟地址和物理地址也是一一对应的关系
3、如何指定操作哪个设备
(1)通过传参which,指定该类下要操作的设备
init进行寄存器的初始化,read实现Key状态的读取(状态寄存器的读取)
CCM_CCGR1若未有值(未映射),则先完成寄存器的映射。



(2)operation操作函数中,获取要操作的次设备号,调用init或read函数

从inode设备节点中,获取次设备号,在调用操作函数
若无inode,则先从file结构体中获取inode结构体,再从中获取次设备号。
(3)设备的创建和销毁:
创建

销毁

驱动代码:
设备树:
在设备树中指定硬件资源的描述(对LED操作)
设备树加载后,可以进入/proc/device-tree/目录下查看根节点下的节点。
1、设备树dts文件:添加led节点
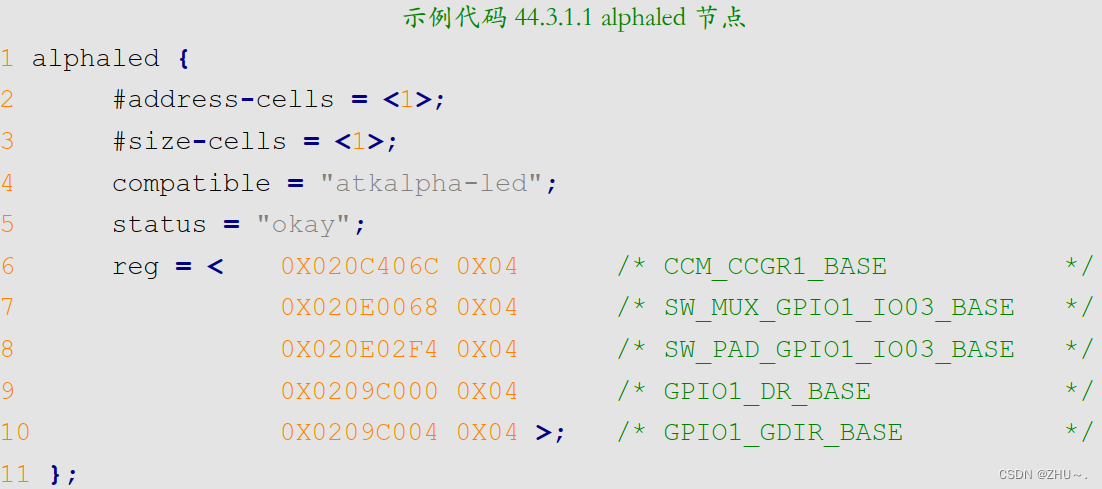
设备树中的节点由一堆属性组成,不同设备需要的属性不同
(1)#address-cells、#size-cells属性:
cell指一个32位的数值,
#address-cells决定子节点reg属性中地址信息所占用的字长(32字节)
#size-cells决定子节点reg属性中长度信息所占的字长
![]()
该节点用1个数表示地址,1个数表示大小
(2)compatible属性:
值为字符串列表,可能有多个驱动支持它(多个字符串)
将设备和驱动绑定起来,通过compatible中的名字找到要加载probe的驱动模块
(3)status属性:
设备状态
“okay”: 表明设备是可操作的
“disabled”:表示当前设备不可操作(禁用掉),但在未来可变为可操作的
“fail”: 表明设备不可操作,检测到错误,不大可能变为可操作
“fail-sss”: 含义与“fail”相同,后面的sss部分是检测到的错误内容
(4)reg属性:
reg属性的值一般是(address,length)对。
一般用于描述设备地址空间资源信息,一般是某个外设的寄存器地址范围信息。
2、驱动程序:获取硬件资源(获取设备树中的属性数据)
led_init()函数中

(1)获取设备节点:alphaled

获取设备节点后,才能获取属性内容
of_find_node_by_path():
用于操作设备树的函数,主要作用是根据给定的设备树路径来查找并返回对应的设备树节点。
参数:设备树中的一个路径,根节点开始的绝对路径。
dtsled.nd为device_node结构体的指针
(2)获取设备节点属性,包括reg
获取compatible属性内容

获取status属性内容
![]()
获取reg属性内容,必须要先获取设备节点dtsled.nd
![]()
of_property_read_u32_array( );
从设备节点中读取一个包含多个'u32'元素的属性到一个用户提供的数组中。
第一个参数:指向设备树节点的指针
第二个参数:要读取的设备树属性的名称。
第三个参数:用户提供的数组,用于存储读取到的数据。
第四个参数:希望读取到的元素的数量。
(3)寄存器地址映射
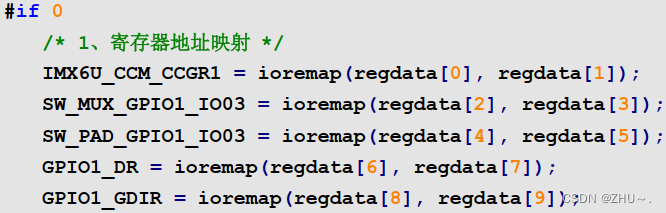
其他对寄存器的操作一样
Pinctrl和GPIO子系统:
省去了对硬件的寄存器的复杂配置(对LED操作)
Pinctrl:设置pin的复用和电气属性
GPIO子系统:若pinctcl子系统将一个pin复用为GPIO的话,接下里就会用到gpio子系统了
用于初始化gpio并提供相应的API函数,对gpio操作
设备树:
1、pinctrl节点:
在 iomuxc 节点的 imx6ul-evk 子节点下创建一个名为“pinctrl_led”的子节点

(1)label:node-name@unit-address
label:方便访问节点,可以通过&label来访问这个节点。
node-name:节点名字。
unit-address:设备的地址或寄存器首地址,若节点没有地址或寄存器,可以不要。
(2)MX6UL_PAD_GPIO1_IO03__GPIO1_IO03
MX6UL - 表示芯片或处理器的型号
PAD_GPIO1_IO03 - 引脚的物理位置或名称
GPIO1_IO03 - 引脚的复用功能,复用为GPIO1的第03号引脚
(3)0x10B0:引脚配置寄存器的值,定义了引脚的各种电气属性。
如上拉/下拉电阻、驱动能力、速度等
在这一步已经完成了引脚的配置
2、LED设备节点
在根节点“/”下创建LED灯节点,节点名为“gpioled”
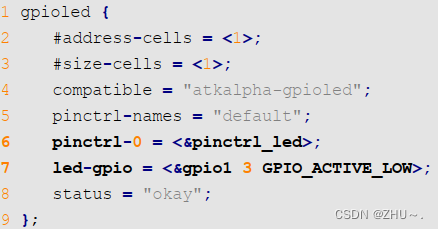
(1)pinctrl-0属性,6行:设置LED灯所使用的PIN对应的pinctrl节点。
要检测PIN是否被其他外设使用,要将其关掉(status="disabled"等)。
(2)led-gpio属性,7行:指定LED灯所使用的GPIO,GPIO1的IO03,低电平有效。
驱动程序中会获取led-gpio属性内容得到GPIO编号,因为gpio子系统的API操作函数需要GPIO编号。
驱动程序:
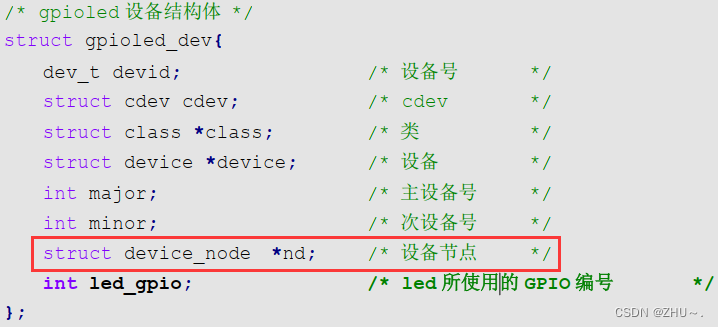
1、设备节点结构体定义:
![]()
2、gpio子系统控制引脚
(1)获取设备节点:
![]()
(2)获取设备树中的gpio属性,得到LED所使用的GPIO编号
![]()
of_get_named_gpio():
读取设备树中定义的GPIO属性,将其转换为GPIO编号。通过此编号可以在驱动中请求、配置和控制GPIO。
第一个参数:指向‘device_node’的指针,表示当前设备的设备树节点
第二个参数:节点中GPIO属性的名字。
第三个参数:索引,表示有多个GPIO同一属性下定义是,应选择哪一个。
(3)设置gpio为输出,并且输出高电平,默认关闭LED灯
![]()
![]()
gpio_direction_output():
Linux内核中提供的操作GPIO的函数,设置指定引脚为输出模式。
第一个参数:GPIO引脚的编号,标识要设置哪个引脚
第二个参数:设置GPIO引脚的初始电平,“1”高电平
(4)设置gpio的值

dev是指向gpioled_dev结构体的指针
gpio_set_value():
设置指定GPIO引脚的输出电平。
第一个参数:GPIO引脚编号。
第二个参数:设置GPIO引脚的初始电平。
Platform设备驱动(无设备树程序):
驱动的分层和分离。
将驱动中的硬件部分分离出来为platform_device,保留的驱动为platform_driver,通过总线匹配注册probe。设备树实质上就是platform_device这部分,替代了原先需要每次编写和加载的.c文件,每次自动加载和生成platform_device。
platform结构体详解、定义和框架可参考上篇博客:
Linux驱动进化:传统模型、设备总线驱动模型、设备树-CSDN博客
1、leddevice.c硬件资源(paltform_device):
(1)resource



struct resource:
start:资源的起始地址
end:资源的结束地址
name:资源的名称
flags:资源类型和属性标志
(2)platform_device结构体

名字为“imx6ul-led”以和platform_deriver配对
(3)注册platform_device结构体
便于通过总线bus和platform_driver配对

2、platform_driver:
(1)从platform_device中获取资源(led_probe函数)
![]()
![]()

platform_get_resource():
用于从平台设备中获取特定类型和序号的资源。
第一个参数:指向“platform_device”结构的指针,表示正在被操作的平台设备。
第二个参数:资源类型标志,指定要获取的资源类型。IORESOURCE_MEM表示一个内 存类型的资源。
第三个参数:资源的索引,设备的资源有多个,要获取哪一个。
(2)初始化LED

设置寄存器的初始值:···省略
(3)platform_driver结构体

通过名字"imx6ul-led"和device匹配。
(4)注册platform_driver
通过bus总线和platform_driver配对后会自动调用probe函数完成资源初始化

3、匹配过程:
驱动模块加载完后,到/sys/bus/platform/drivers/目录下

led的设备文件在/sys/bus/platform/devices/目录下

驱动和设备匹配

设备树下的Platform设备驱动:
前面已经实现了设备树(加载设备树时会自动生成platform_device),这里只看platform_driver
leddriver.c
1、初始化IO
(1)从设备树中获取设备节点
![]()
(2)获取设备树中的gpio属性,得到LED所使用的GPIO编号
![]()
(3) Linux 内核中用于请求一个 GPIO(通用输入输出)引脚的使用权。之后操作gpio引脚
![]()
gpio_request():
Linux内核中用于请求一个GPIO引脚的使用权
第一个参数:要申请的GPIO引脚的编号。
第二个参数:请求的GPIO引脚相关联的标签或名称,可自定义。