目录
1.安装驱动
2.测试固件
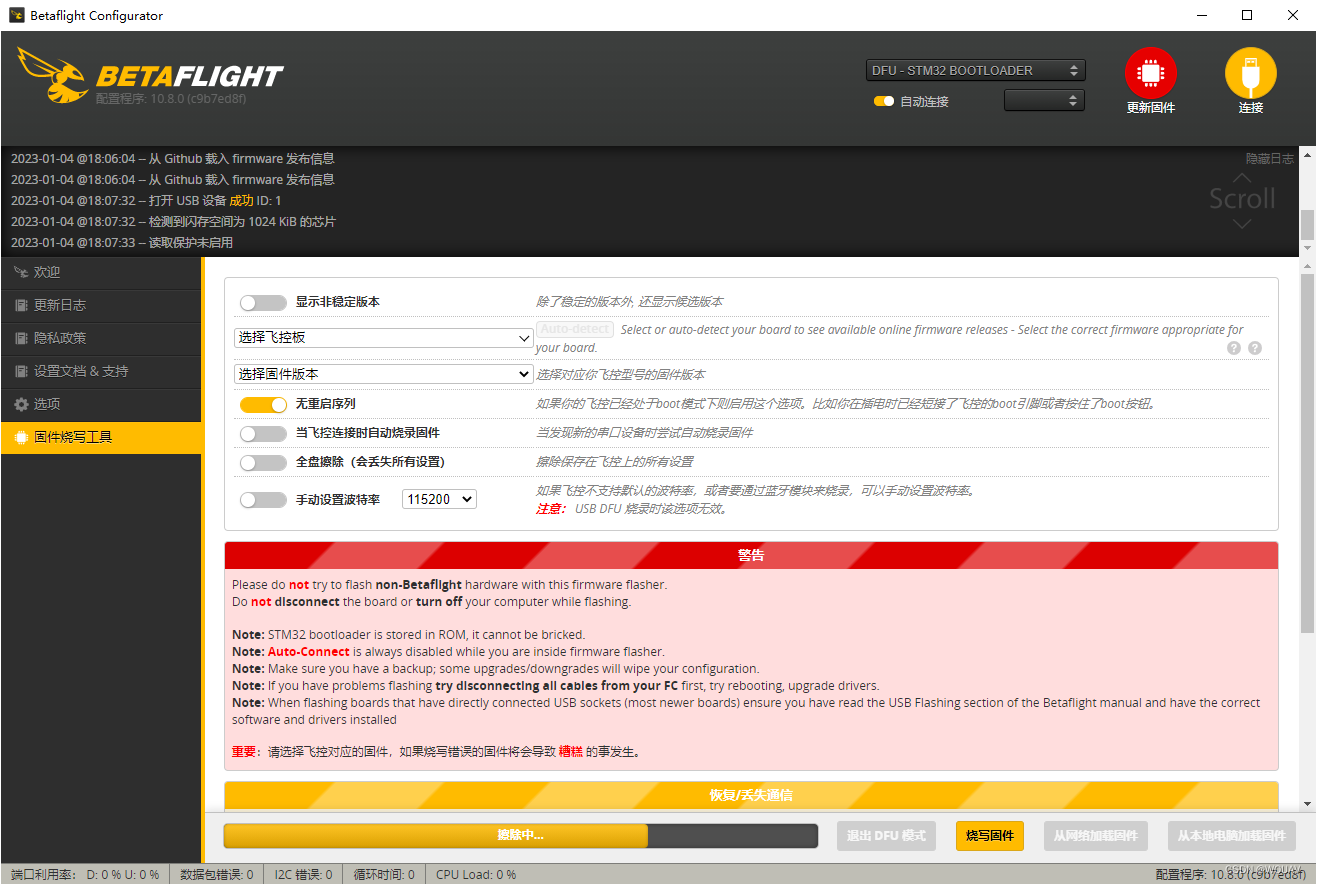
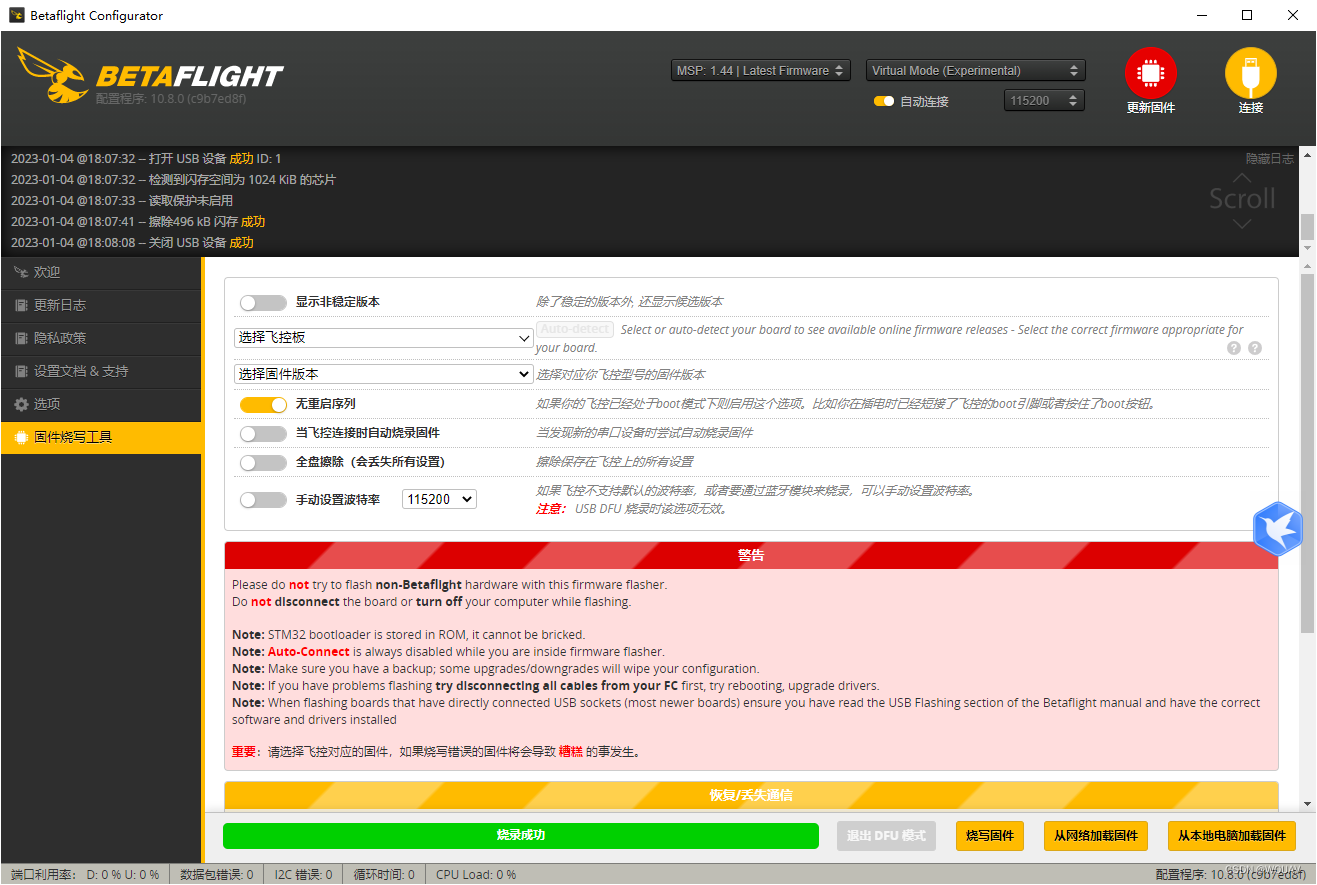
3.烧录固件
4.寻找补充代码
betaflight/unified_targets/configs/OMNIBUSF4SD.config
5.连接飞控,点击cli命令行。
6.寻找其他稳定版本
当安装完毕betaflight软件后,第一次链接飞控与电脑,出现无法连接情况,点击无反应。

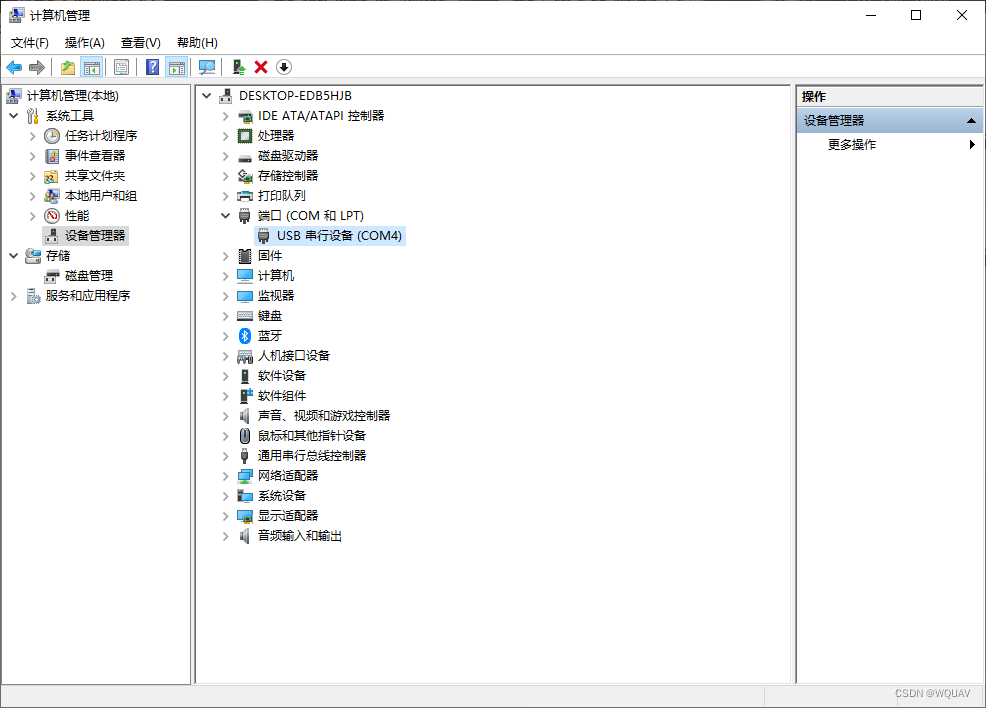
1.安装驱动
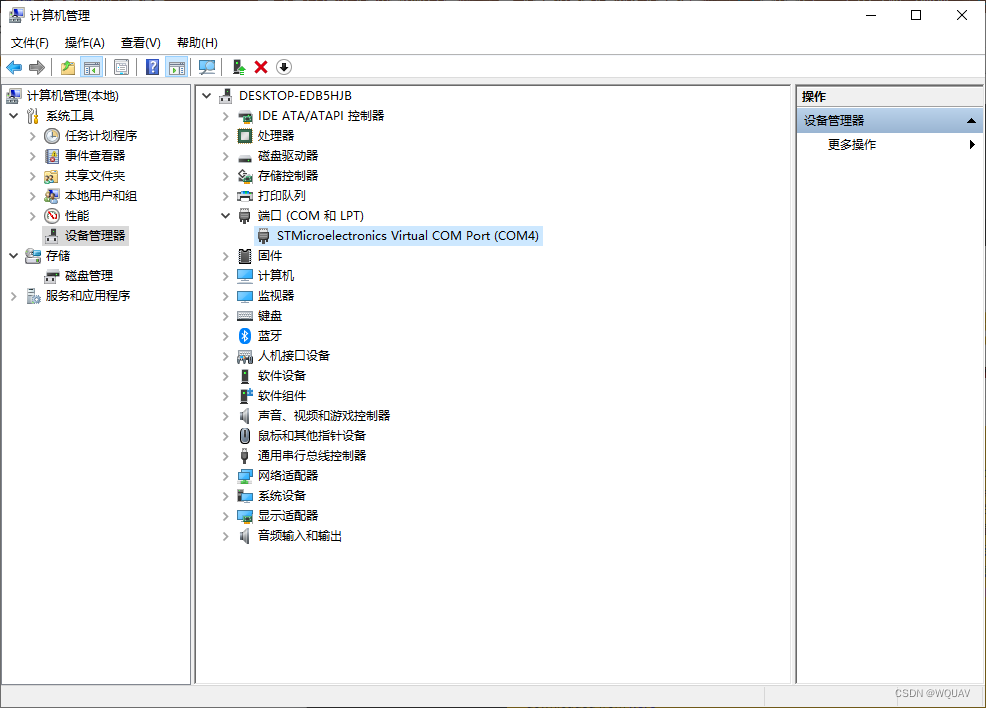
点击计算机-管理-设备管理器-端口,出现第一张图。
这种情况为未识别出来。虽然通过下载的各类驱动,但是在win10系统下,很多系统usb文件是无法替换的。
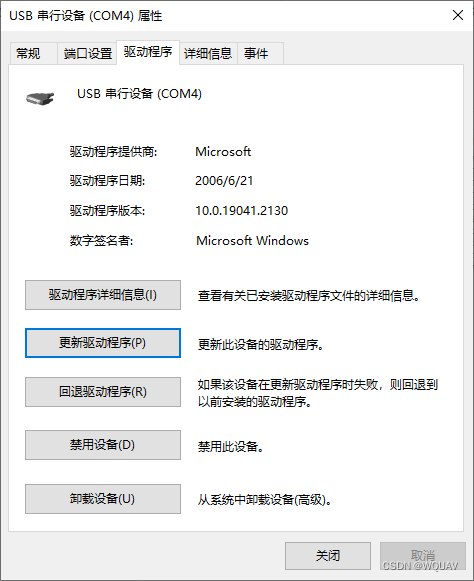
如果不行,继续查看端口属性。
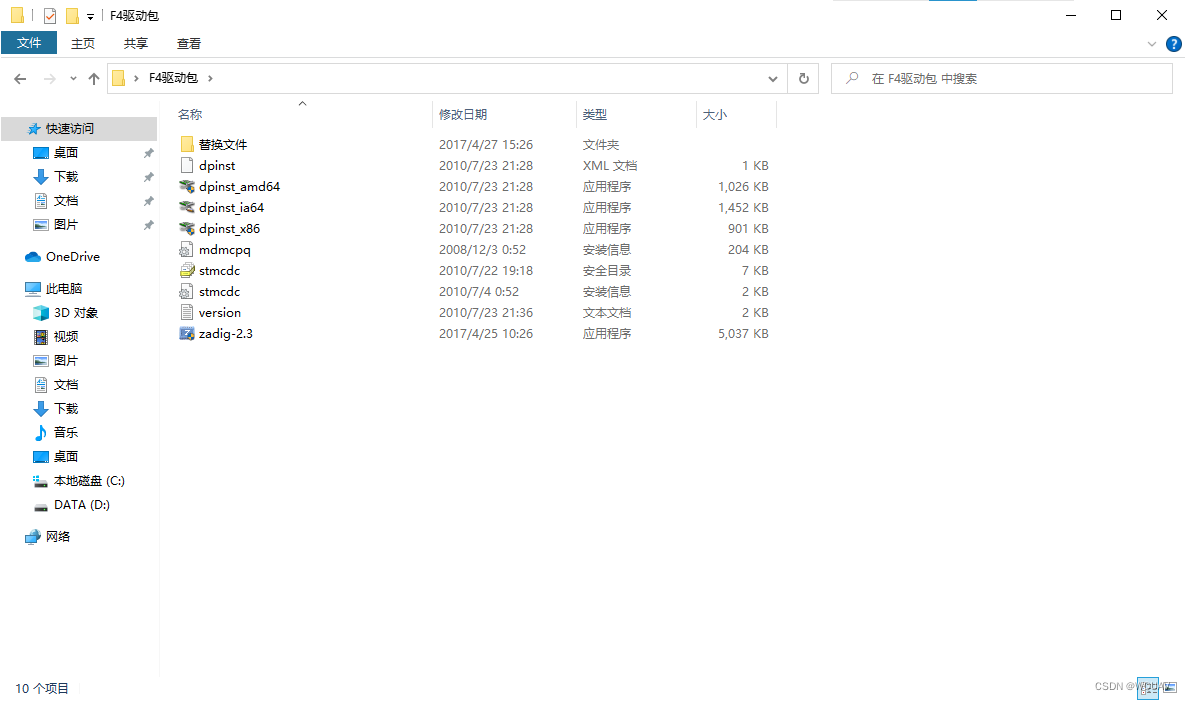
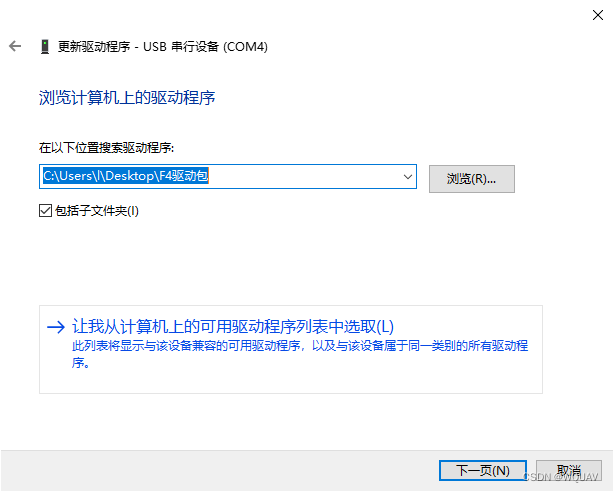
浏览我的电脑
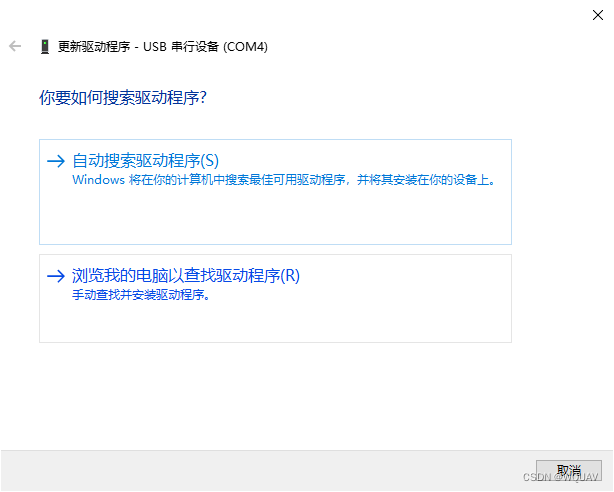
让我从计算机上选取。
从磁盘安装
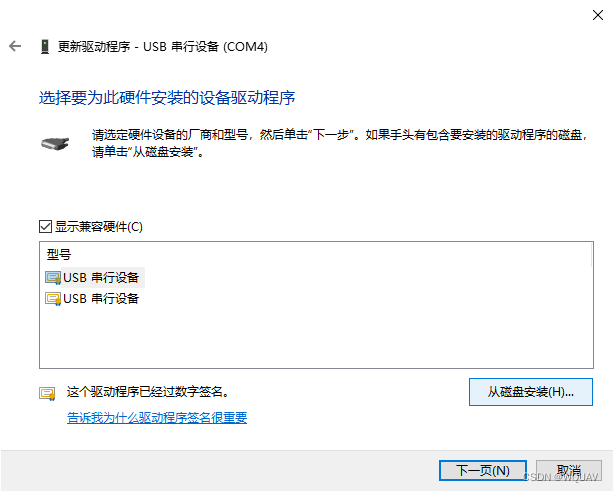
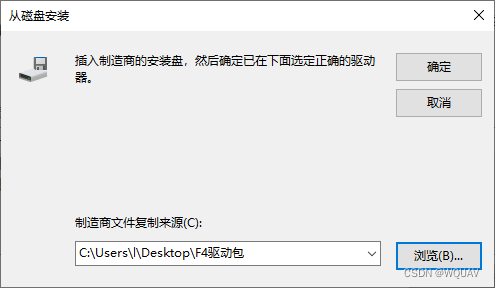

此处就是症结所在,刚才的安装成功只是系统默认了一个有效的驱动,但不是我们需要的程序,我们需要的系统并不认可其兼容性。 确定。
在返回计算机管理
重新插拔飞控。
打开如下程序。
按着飞控上的调试按钮插拔飞控。
此时飞控的led灯只显示黄色长亮。
打开地面站
继续进行刷或者其他。
如果还是不识别,进行下一步。
2.测试固件
有可能时商家发错了刷的固件,例如bf刷为arduplane
飞控连接mission planner,如果能识别并显示水平状态随着飞控移动变化,说明固件版本错误。
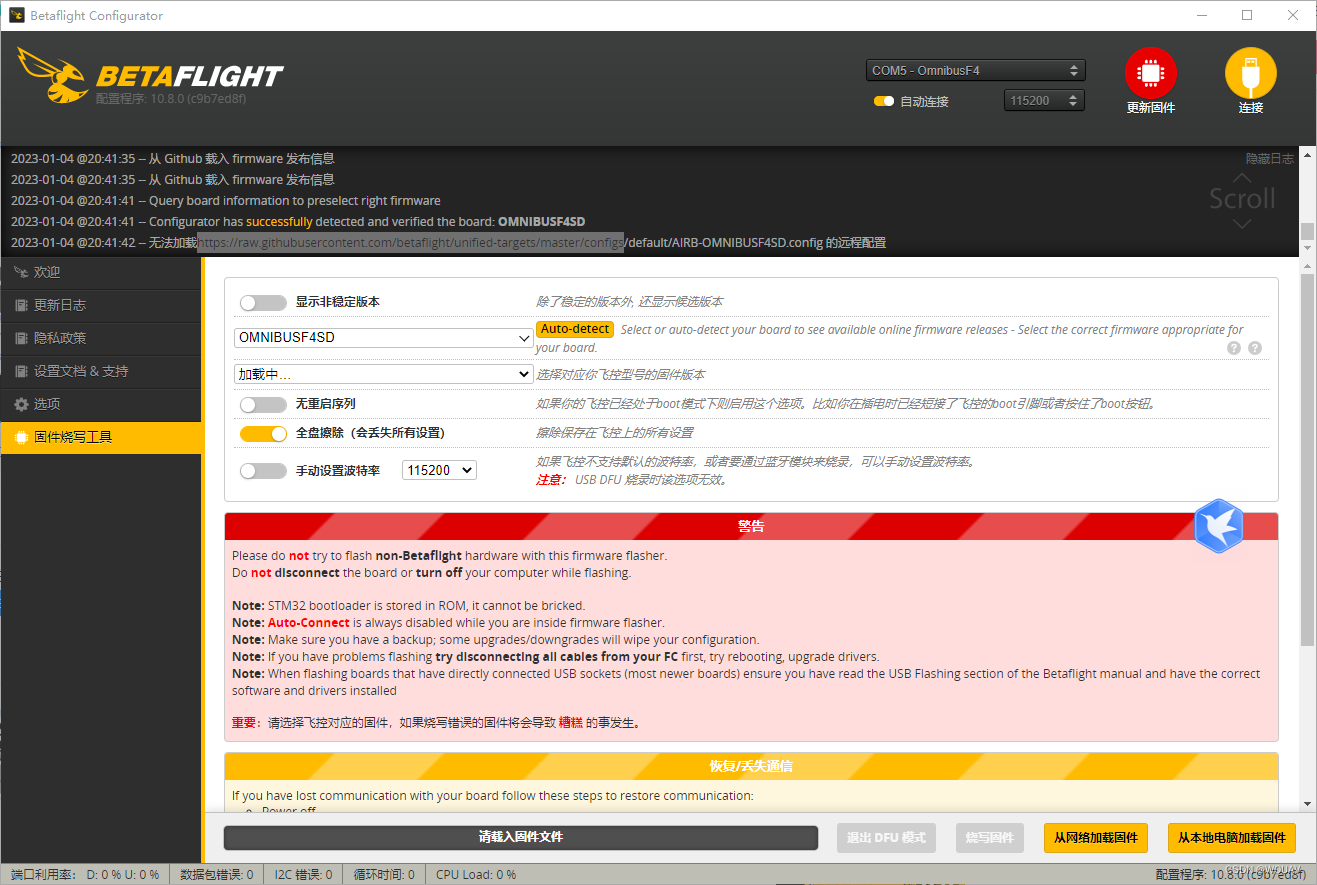
3.烧录固件
通过 mission planner可以读出飞控版本,例如OMNIBUSF4,此时,可以去https://github.com/betaflight/betaflight/releases下载配套的固件:betaflight_4.0.4_OMNIBUSF4SD

重新插拔重启软件。

此时,显示无法识别芯片,陀螺仪等全部是黑色。
The Betaflight Open Source Flight Controller Firmware Project · GitHub由于 The Betaflight Open Source Flight Controller Firmware Project · GitHub是外边 的网站,通过地面站很难联通。
即便是直接在浏览器登录,也是相当拥堵缓慢。
即使慢吞吞,继续进入下一步。
4.寻找补充代码
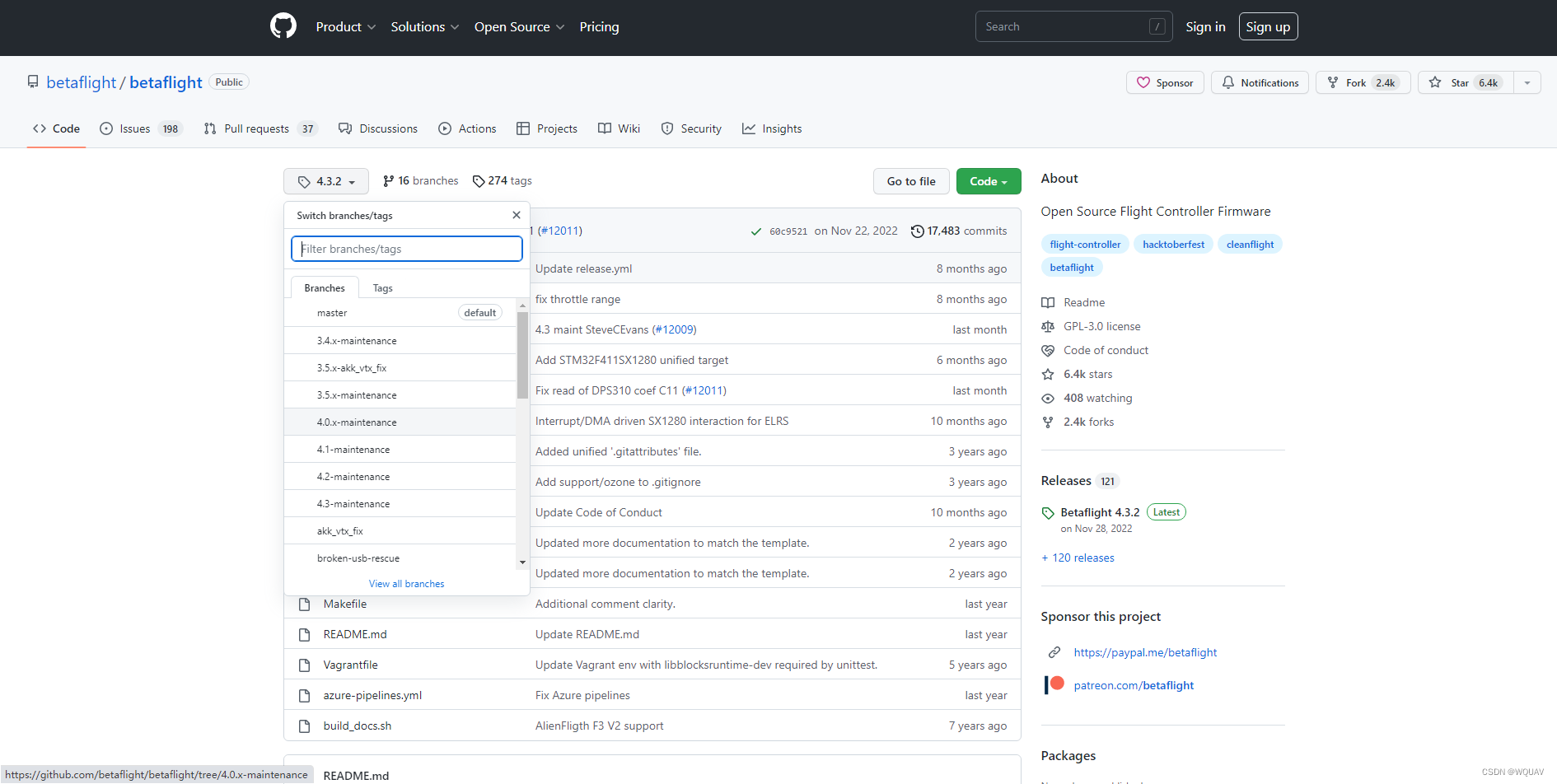
进入所需版本固件。如果是4.3.2就进入
https://github.com/betaflight/betaflight/releases/tag/4.3.2
点击code
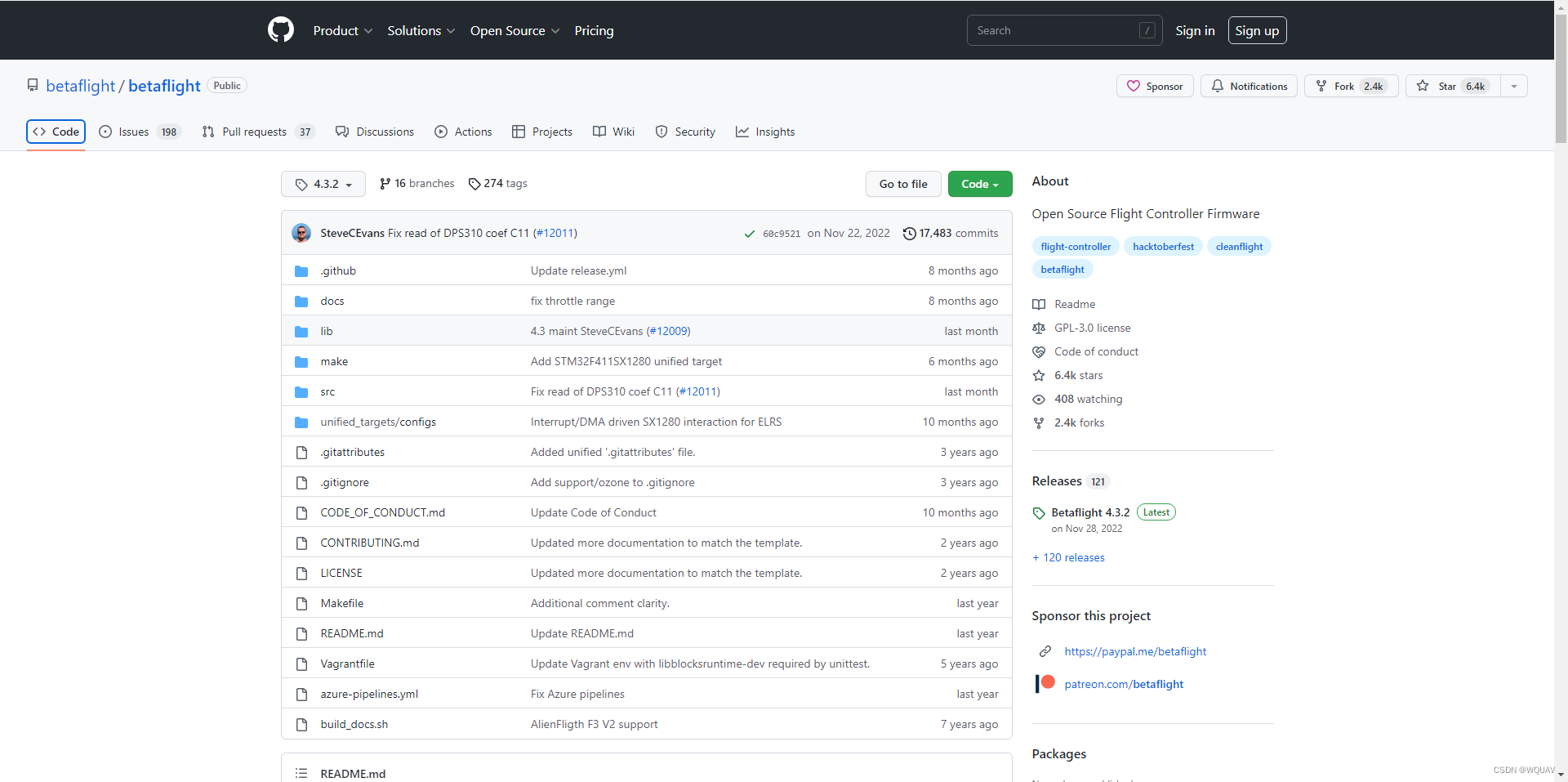
点击unified_targets/configs
如果不是你的版本,点击版本号右侧箭头,选择所需。
依次点击betaflight/unified_targets/configs/
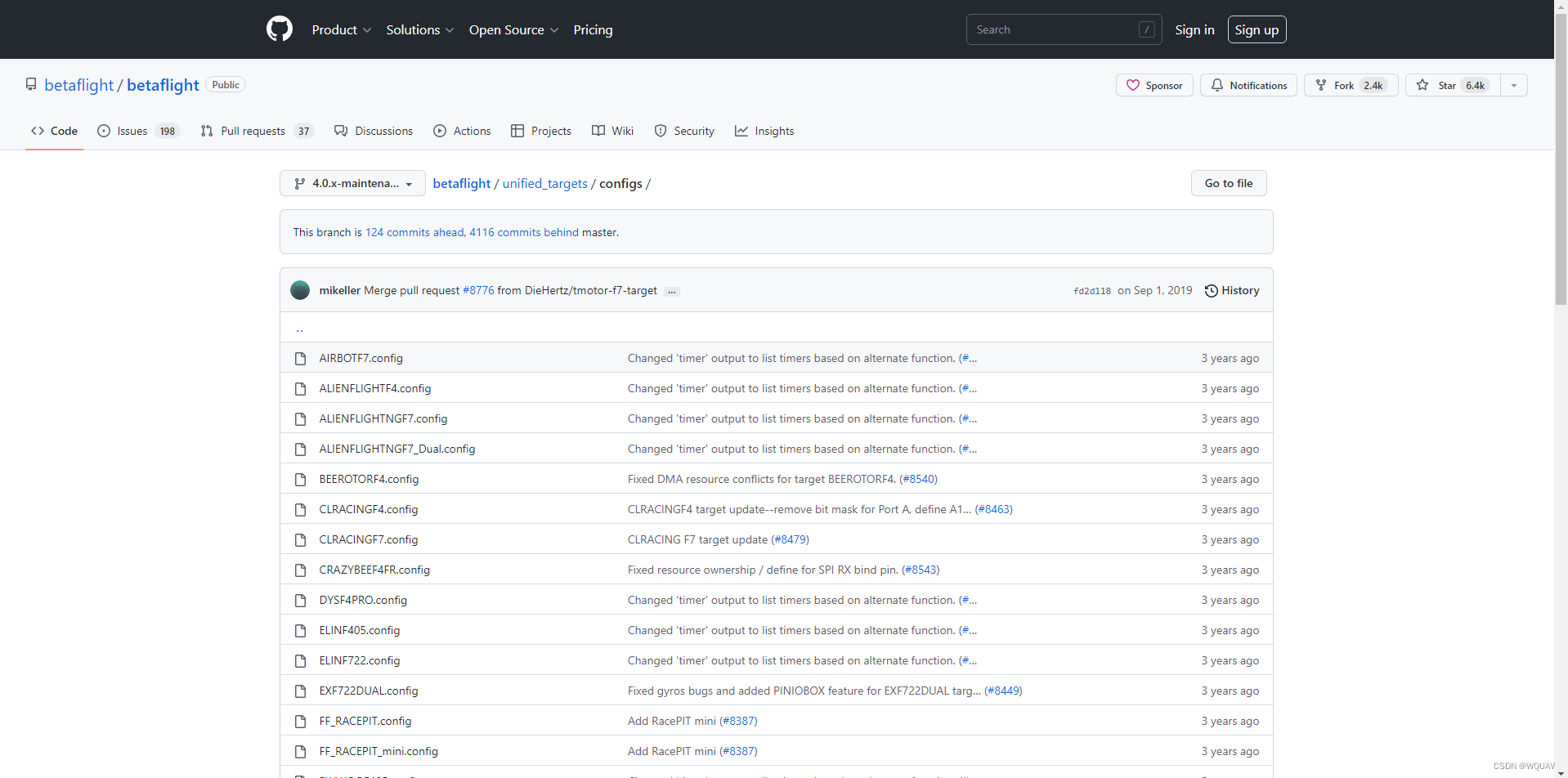
选择与飞控显示版本完全一致的代码,例如:
betaflight/unified_targets/configs/OMNIBUSF4SD.config
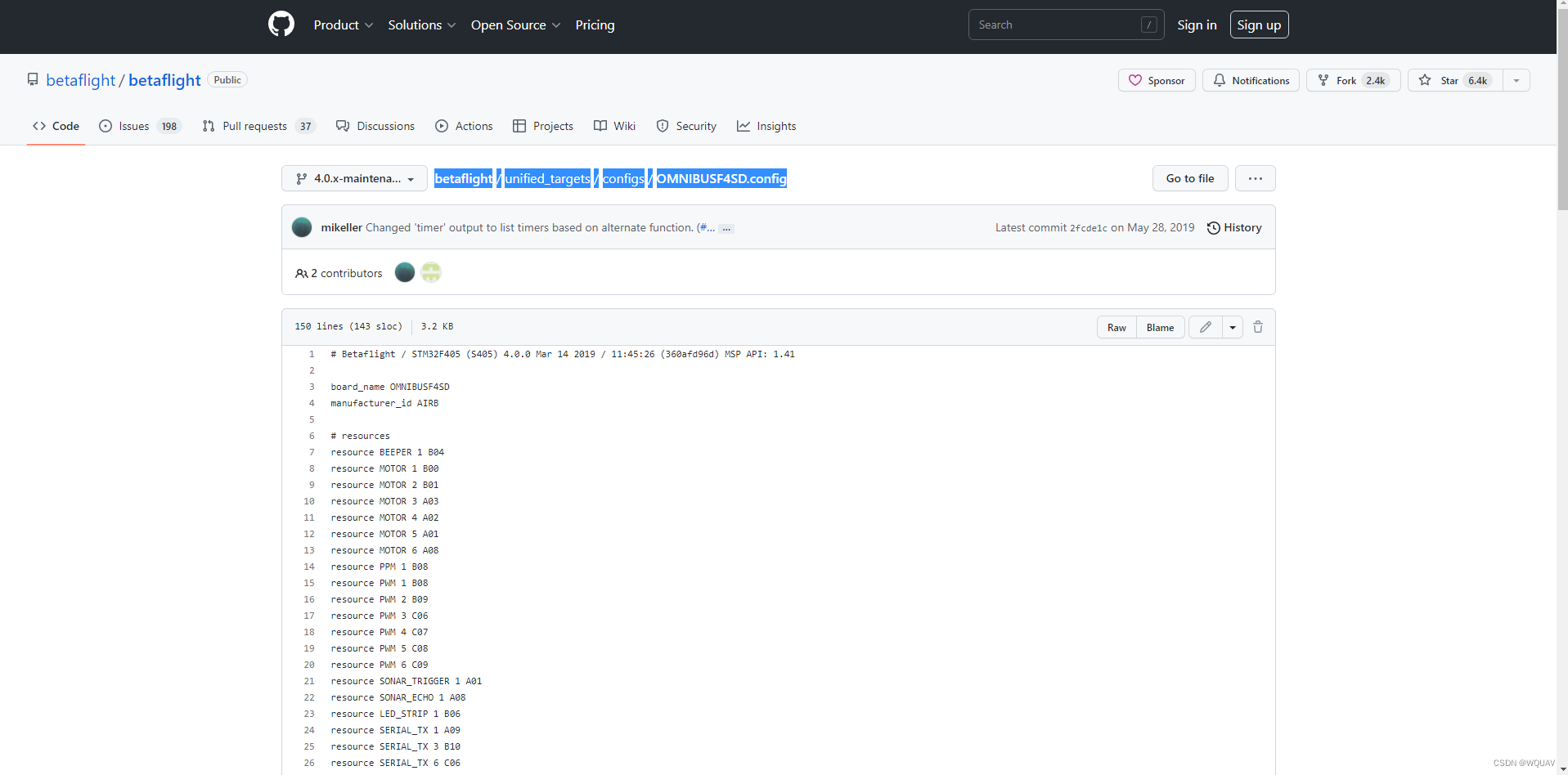
代码如下:
# Betaflight / STM32F405 (S405) 4.0.0 Mar 14 2019 / 11:45:26 (360afd96d) MSP API: 1.41board_name OMNIBUSF4SD
manufacturer_id AIRB# resources
resource BEEPER 1 B04
resource MOTOR 1 B00
resource MOTOR 2 B01
resource MOTOR 3 A03
resource MOTOR 4 A02
resource MOTOR 5 A01
resource MOTOR 6 A08
resource PPM 1 B08
resource PWM 1 B08
resource PWM 2 B09
resource PWM 3 C06
resource PWM 4 C07
resource PWM 5 C08
resource PWM 6 C09
resource SONAR_TRIGGER 1 A01
resource SONAR_ECHO 1 A08
resource LED_STRIP 1 B06
resource SERIAL_TX 1 A09
resource SERIAL_TX 3 B10
resource SERIAL_TX 6 C06
resource SERIAL_RX 1 A10
resource SERIAL_RX 3 B11
resource SERIAL_RX 6 C07
resource INVERTER 3 C09
resource INVERTER 6 C08
resource LED 1 B05
resource SPI_SCK 1 A05
resource SPI_SCK 2 B13
resource SPI_SCK 3 C10
resource SPI_MISO 1 A06
resource SPI_MISO 2 B14
resource SPI_MISO 3 C11
resource SPI_MOSI 1 A07
resource SPI_MOSI 2 B15
resource SPI_MOSI 3 C12
resource ADC_BATT 1 C02
resource ADC_RSSI 1 A00
resource ADC_CURR 1 C01
resource BARO_CS 1 B03
resource SDCARD_CS 1 B12
resource SDCARD_DETECT 1 B07
resource FLASH_CS 1 B12
resource OSD_CS 1 A15
resource GYRO_EXTI 1 C04
resource GYRO_CS 1 A04
resource USB_DETECT 1 C05# timer
timer B08 AF3
# pin B08: TIM10 CH1 (AF3)
timer B09 AF2
# pin B09: TIM4 CH4 (AF2)
timer C06 AF3
# pin C06: TIM8 CH1 (AF3)
timer C07 AF3
# pin C07: TIM8 CH2 (AF3)
timer C08 AF3
# pin C08: TIM8 CH3 (AF3)
timer C09 AF3
# pin C09: TIM8 CH4 (AF3)
timer B00 AF2
# pin B00: TIM3 CH3 (AF2)
timer B01 AF2
# pin B01: TIM3 CH4 (AF2)
timer A03 AF1
# pin A03: TIM2 CH4 (AF1)
timer A02 AF1
# pin A02: TIM2 CH3 (AF1)
timer A01 AF2
# pin A01: TIM5 CH2 (AF2)
timer B06 AF2
# pin B06: TIM4 CH1 (AF2)
timer A08 AF1
# pin A08: TIM1 CH1 (AF1)
timer A09 AF1
# pin A09: TIM1 CH2 (AF1)
timer A10 AF1
# pin A10: TIM1 CH3 (AF1)# dma
dma SPI_TX 2 0
# SPI_TX 2: DMA1 Stream 4 Channel 0
dma ADC 2 1
# ADC 2: DMA2 Stream 3 Channel 1
dma pin C06 0
# pin C06: DMA2 Stream 2 Channel 0
dma pin C07 0
# pin C07: DMA2 Stream 2 Channel 0
dma pin C08 0
# pin C08: DMA2 Stream 2 Channel 0
dma pin C09 0
# pin C09: DMA2 Stream 7 Channel 7
dma pin B00 0
# pin B00: DMA1 Stream 7 Channel 5
dma pin B01 0
# pin B01: DMA1 Stream 2 Channel 5
dma pin A03 1
# pin A03: DMA1 Stream 6 Channel 3
dma pin A02 0
# pin A02: DMA1 Stream 1 Channel 3
dma pin A01 0
# pin A01: DMA1 Stream 4 Channel 6
dma pin B06 0
# pin B06: DMA1 Stream 0 Channel 2
dma pin A08 0
# pin A08: DMA2 Stream 6 Channel 0
dma pin A09 0
# pin A09: DMA2 Stream 6 Channel 0
dma pin A10 0
# pin A10: DMA2 Stream 6 Channel 0# feature
feature -RX_PARALLEL_PWM
feature RX_SERIAL# serial
serial 5 64 115200 57600 0 115200# master
set mag_bustype = I2C
set mag_i2c_device = 2
set baro_spi_device = 3
set adc_device = 2
set blackbox_device = SDCARD
set min_throttle = 1070
set dshot_burst = ON
set use_unsynced_pwm = OFF
set motor_pwm_protocol = ONESHOT125
set motor_pwm_rate = 480
set current_meter = ADC
set battery_meter = ADC
set beeper_inversion = ON
set beeper_od = OFF
set sdcard_detect_inverted = ON
set sdcard_mode = SPI
set sdcard_spi_bus = 2
set system_hse_mhz = 8
set max7456_spi_bus = 3
set dashboard_i2c_bus = 2
set flash_spi_bus = 2
set gyro_1_bustype = SPI
set gyro_1_spibus = 1
set gyro_1_sensor_align = CW270
set gyro_2_spibus = 1复制代码。
5.连接飞控,点击cli命令行。
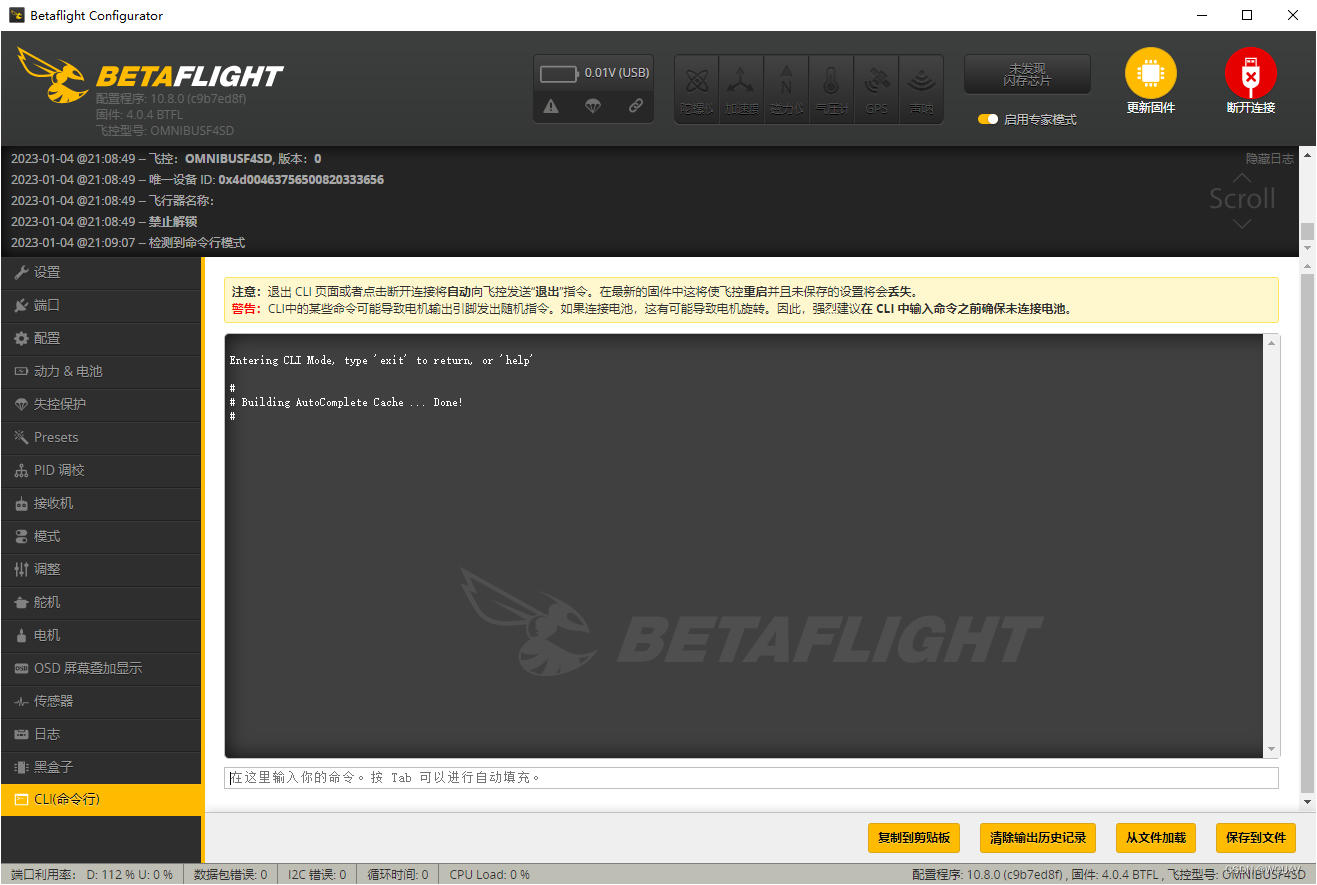
在下方粘贴。按enter。
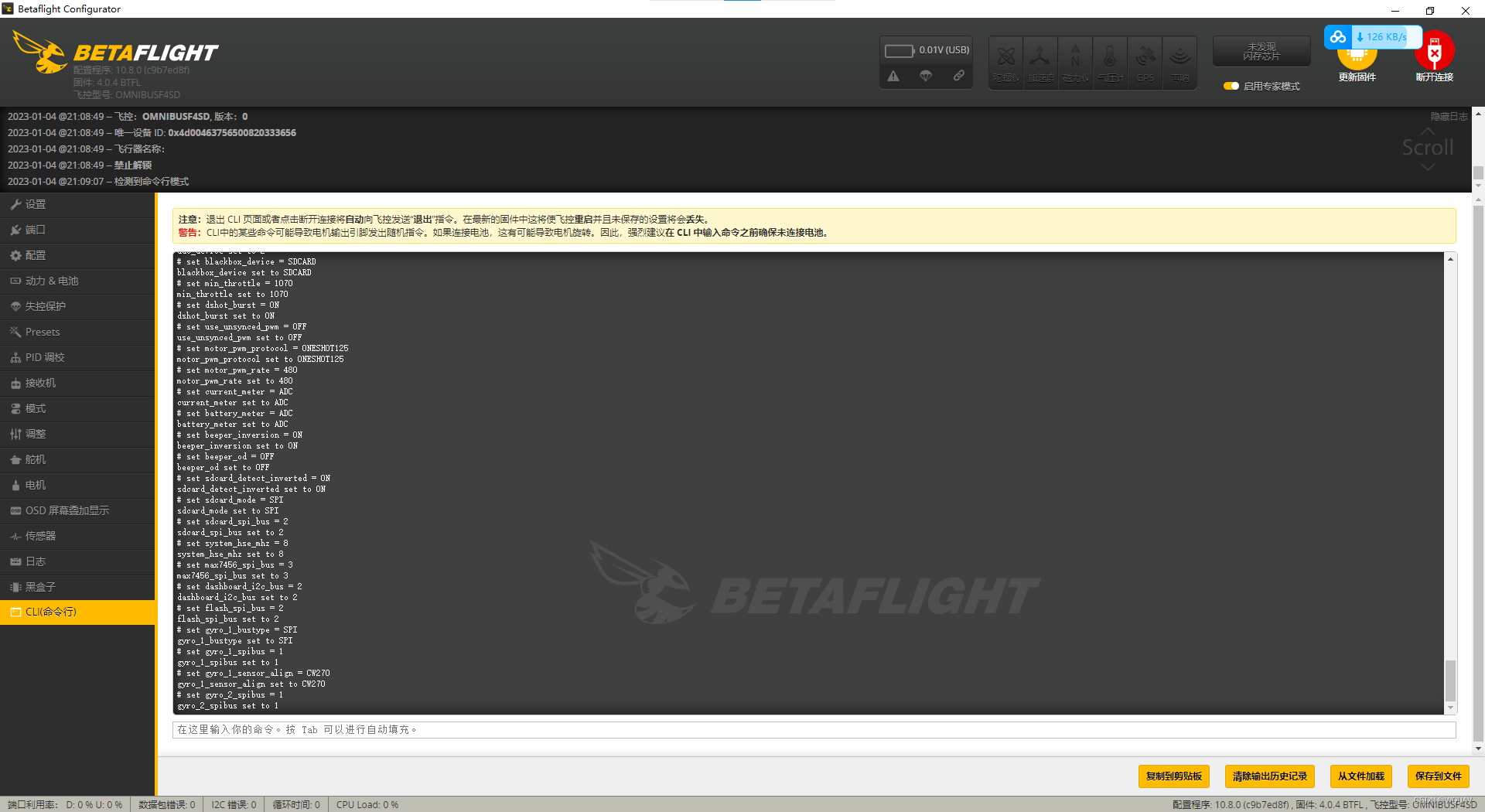
输入:
save
按enter。
此时,如果还不行,进入下一步。
6.寻找其他稳定版本
打开灯,仔细观察arm芯片上的代码,例如:STM32F405
找到Release Betaflight 4.3.2 · betaflight/betaflight · GitHubOpen Source Flight Controller Firmware. Contribute to betaflight/betaflight development by creating an account on GitHub. https://github.com/betaflight/betaflight/releases/tag/4.3.2找到对应的
https://github.com/betaflight/betaflight/releases/tag/4.3.2找到对应的
betaflight_4.3.2_STM32F405.hex
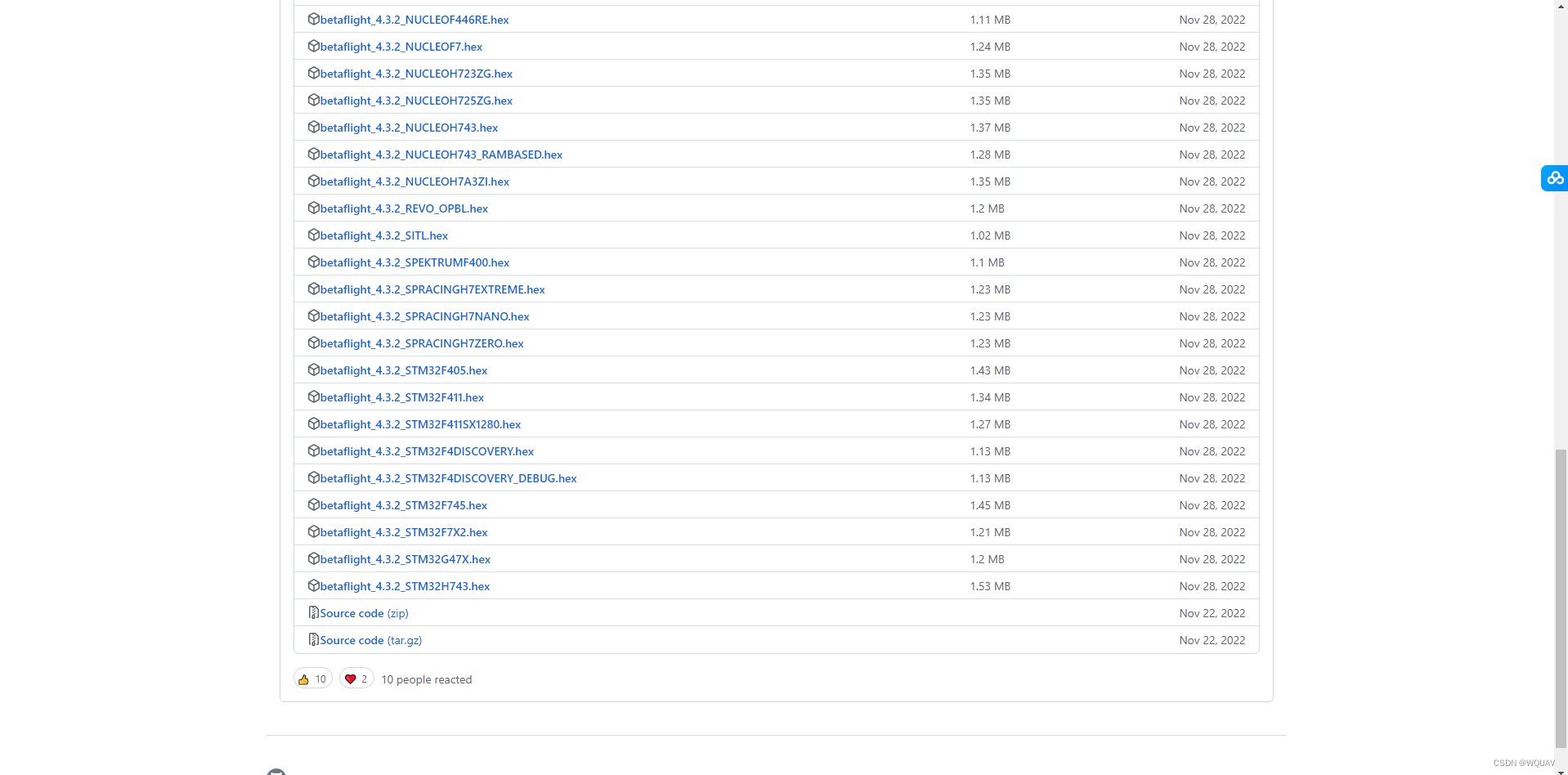
点击下载,比较慢,但是文件很小。
重新烧录一次。
再次复制运行cli。上一次的就行,主要是核对抬头的版本对上。
# Betaflight / STM32F405 (S405) 4.0.0 Mar 14 2019 / 11:45:26 (360afd96d) MSP API: 1.41
board_name OMNIBUSF4SD
manufacturer_id AIRB# resources
resource BEEPER 1 B04
resource MOTOR 1 B00
resource MOTOR 2 B01
resource MOTOR 3 A03
resource MOTOR 4 A02
resource MOTOR 5 A01
resource MOTOR 6 A08
resource PPM 1 B08
resource PWM 1 B08
resource PWM 2 B09
resource PWM 3 C06
resource PWM 4 C07
resource PWM 5 C08
resource PWM 6 C09
resource SONAR_TRIGGER 1 A01
resource SONAR_ECHO 1 A08
resource LED_STRIP 1 B06
resource SERIAL_TX 1 A09
resource SERIAL_TX 3 B10
resource SERIAL_TX 6 C06
resource SERIAL_RX 1 A10
resource SERIAL_RX 3 B11
resource SERIAL_RX 6 C07
resource INVERTER 3 C09
resource INVERTER 6 C08
resource LED 1 B05
resource SPI_SCK 1 A05
resource SPI_SCK 2 B13
resource SPI_SCK 3 C10
resource SPI_MISO 1 A06
resource SPI_MISO 2 B14
resource SPI_MISO 3 C11
resource SPI_MOSI 1 A07
resource SPI_MOSI 2 B15
resource SPI_MOSI 3 C12
resource ADC_BATT 1 C02
resource ADC_RSSI 1 A00
resource ADC_CURR 1 C01
resource BARO_CS 1 B03
resource SDCARD_CS 1 B12
resource SDCARD_DETECT 1 B07
resource FLASH_CS 1 B12
resource OSD_CS 1 A15
resource GYRO_EXTI 1 C04
resource GYRO_CS 1 A04
resource USB_DETECT 1 C05# timer
timer B08 AF3
# pin B08: TIM10 CH1 (AF3)
timer B09 AF2
# pin B09: TIM4 CH4 (AF2)
timer C06 AF3
# pin C06: TIM8 CH1 (AF3)
timer C07 AF3
# pin C07: TIM8 CH2 (AF3)
timer C08 AF3
# pin C08: TIM8 CH3 (AF3)
timer C09 AF3
# pin C09: TIM8 CH4 (AF3)
timer B00 AF2
# pin B00: TIM3 CH3 (AF2)
timer B01 AF2
# pin B01: TIM3 CH4 (AF2)
timer A03 AF1
# pin A03: TIM2 CH4 (AF1)
timer A02 AF1
# pin A02: TIM2 CH3 (AF1)
timer A01 AF2
# pin A01: TIM5 CH2 (AF2)
timer B06 AF2
# pin B06: TIM4 CH1 (AF2)
timer A08 AF1
# pin A08: TIM1 CH1 (AF1)
timer A09 AF1
# pin A09: TIM1 CH2 (AF1)
timer A10 AF1
# pin A10: TIM1 CH3 (AF1)# dma
dma SPI_TX 2 0
# SPI_TX 2: DMA1 Stream 4 Channel 0
dma ADC 2 1
# ADC 2: DMA2 Stream 3 Channel 1
dma pin C06 0
# pin C06: DMA2 Stream 2 Channel 0
dma pin C07 0
# pin C07: DMA2 Stream 2 Channel 0
dma pin C08 0
# pin C08: DMA2 Stream 2 Channel 0
dma pin C09 0
# pin C09: DMA2 Stream 7 Channel 7
dma pin B00 0
# pin B00: DMA1 Stream 7 Channel 5
dma pin B01 0
# pin B01: DMA1 Stream 2 Channel 5
dma pin A03 1
# pin A03: DMA1 Stream 6 Channel 3
dma pin A02 0
# pin A02: DMA1 Stream 1 Channel 3
dma pin A01 0
# pin A01: DMA1 Stream 4 Channel 6
dma pin B06 0
# pin B06: DMA1 Stream 0 Channel 2
dma pin A08 0
# pin A08: DMA2 Stream 6 Channel 0
dma pin A09 0
# pin A09: DMA2 Stream 6 Channel 0
dma pin A10 0
# pin A10: DMA2 Stream 6 Channel 0# feature
feature -RX_PARALLEL_PWM
feature RX_SERIAL# serial
serial 5 64 115200 57600 0 115200# master
set mag_bustype = I2C
set mag_i2c_device = 2
set baro_spi_device = 3
set adc_device = 2
set blackbox_device = SDCARD
set min_throttle = 1070
set dshot_burst = ON
set use_unsynced_pwm = OFF
set motor_pwm_protocol = ONESHOT125
set motor_pwm_rate = 480
set current_meter = ADC
set battery_meter = ADC
set beeper_inversion = ON
set beeper_od = OFF
set sdcard_detect_inverted = ON
set sdcard_mode = SPI
set sdcard_spi_bus = 2
set system_hse_mhz = 8
set max7456_spi_bus = 3
set dashboard_i2c_bus = 2
set flash_spi_bus = 2
set gyro_1_bustype = SPI
set gyro_1_spibus = 1
set gyro_1_sensor_align = CW270
set gyro_2_spibus = 1
ok,可以识别了。