win10配置星际争霸过程:
-
下载星际争霸(这里用的是台湾版),设置环境变量,命名为
SC2PATH路径,路径为游戏文件所在路径 -
用conda create创建一个
pymarl环境:conda create -n pymarl python=3.7 -y conda activate pymarl -
安装CUDA对应的Pytorch版本,(这里用的是CUDA 10.0,pytorch 1.2)
-
pip install sacred numpy scipy matplotlib seaborn pyyaml pygame pytest probscale imageio snakeviz tensorboard-logger -
pip install pysc2 -
下载 SMAC源码,按照官方的教程进行安装,如下:
- 在根目录下(包含setup.py文件的目录)
pip install smac,期间可能出现swig指令找不到的情况,用conda install swig,直到安装不报错,并且进入Python后import smac这一步不报错为止。 - 复制
SMAC_Maps文件夹到路径SC2PATH/Maps,把smac包所在路径设置到环境变量中,命名为PYTHONPATH,方便后续Pymarl算法调用。 - git下载pymarl代码,运行的文件是src/main.py文件。
- 在根目录下(包含setup.py文件的目录)
其他报错:
- 如果显示地图导入失败,则参照该博客
- 在
pip install smac过程中会出现visual studio build tools缺失的情况,Microsoft Visual C++ 14.0 is required。与之伴随的错误是:
ERROR: Failed building wheel for ConfigSpace: 这个问题本人在另外一台机器(未安装VS)时遇到,但尚未解决,希望大佬能提供一些见解。
以下是网上的一些方案,但均未成功: - 安装cython
- https://github.com/automl/ConfigSpace/issues/130
以上是因为没安装Microsoft Visual C++ 14.0造成的,解决方案参考以下链接:
https://zhuanlan.zhihu.com/p/165008313
- pycharm不能识别自己的功能包: 右键文件夹并选择mark directory as sources root
一些运行结果截图
-
运行random agent的结果如下:
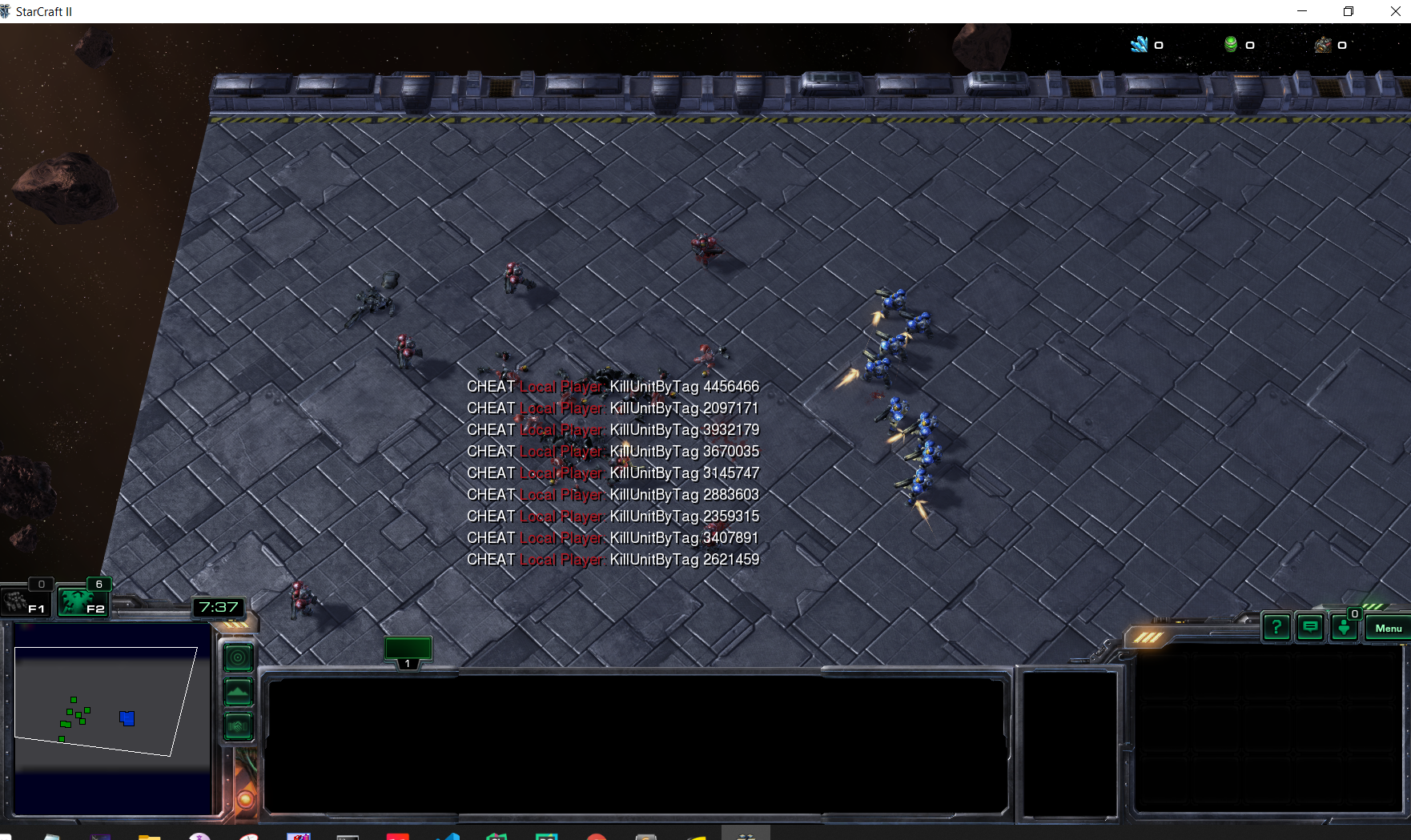
-
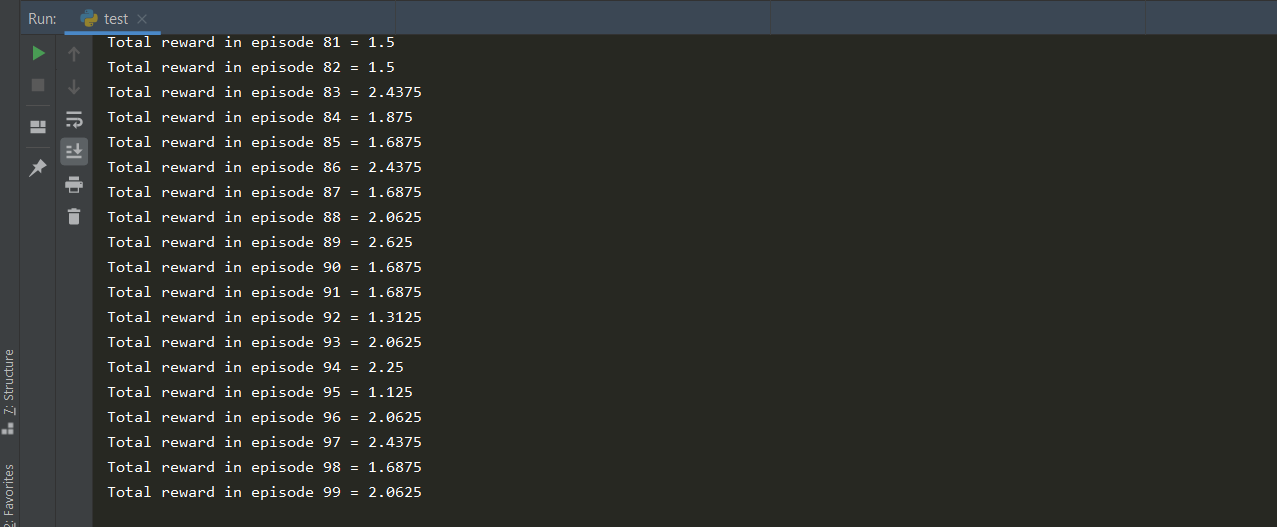
运行其他算法(例如RODE)
指令:
python src/main.py --config=rode --env-config=sc2 with env_args.map_name=corridor n_role_clusters=3 role_interval=5 t_max=50500
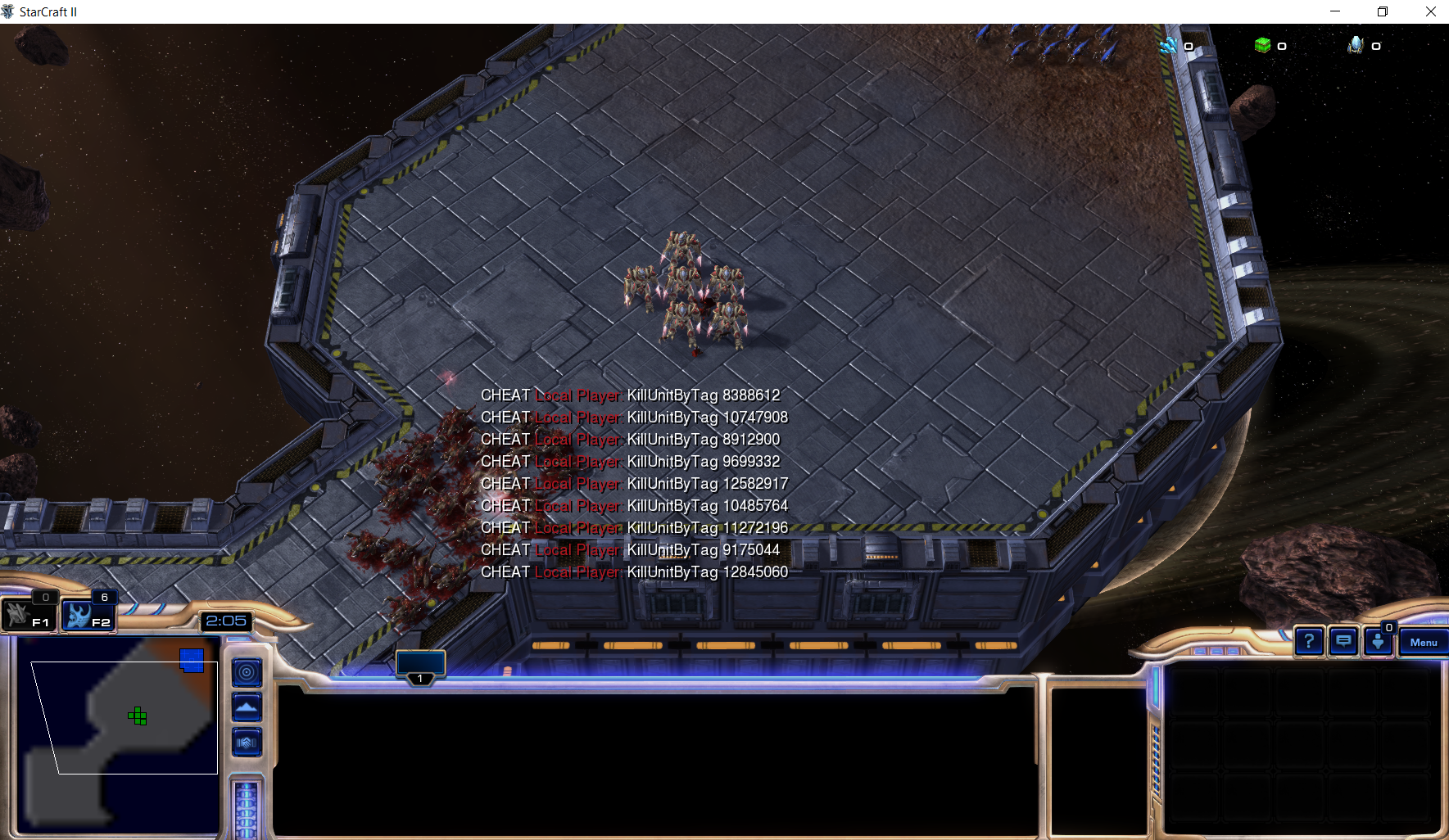

-
其他算法(QMIX, VDN等):

源代码链接:https://github.com/starry-sky6688/StarCraft
SMAC与Pymarl相关博文链接:
ubuntu单独安装SMAC
非whiRL pymarl的算法库安装
SMAC官方地址
pymarl官方地址
修改版的pymarl2
windows+ubuntu安装SMAC和Pymarl
简单运行project的方法