相关文章

SLAM精度测评——EVO
1.install
GitHub - MichaelGrupp/evo: Python package for the evaluation of odometry and SLAM
注意:安装好依赖!
sudo apt install python-pip
pip install evo --upgrade --no-binary evo
or
pip install evo --upgrade --no-binary evo --use…

全新ALIENWARE外星人笔记本问世,预言设计迭代升级
2023年1月6日,ALIENWARE外星人宣布推出四款全新游戏笔记本电脑——ALIENWARE m18和m16、ALIENWARE x16和x14 R2。ALIENWARE外星人新品首次推出全新外观和材质、强劲的性能升级、进一步增强的设计和舒适性,以及经过全面优化的AWCC外星人智动能技术平台。 …
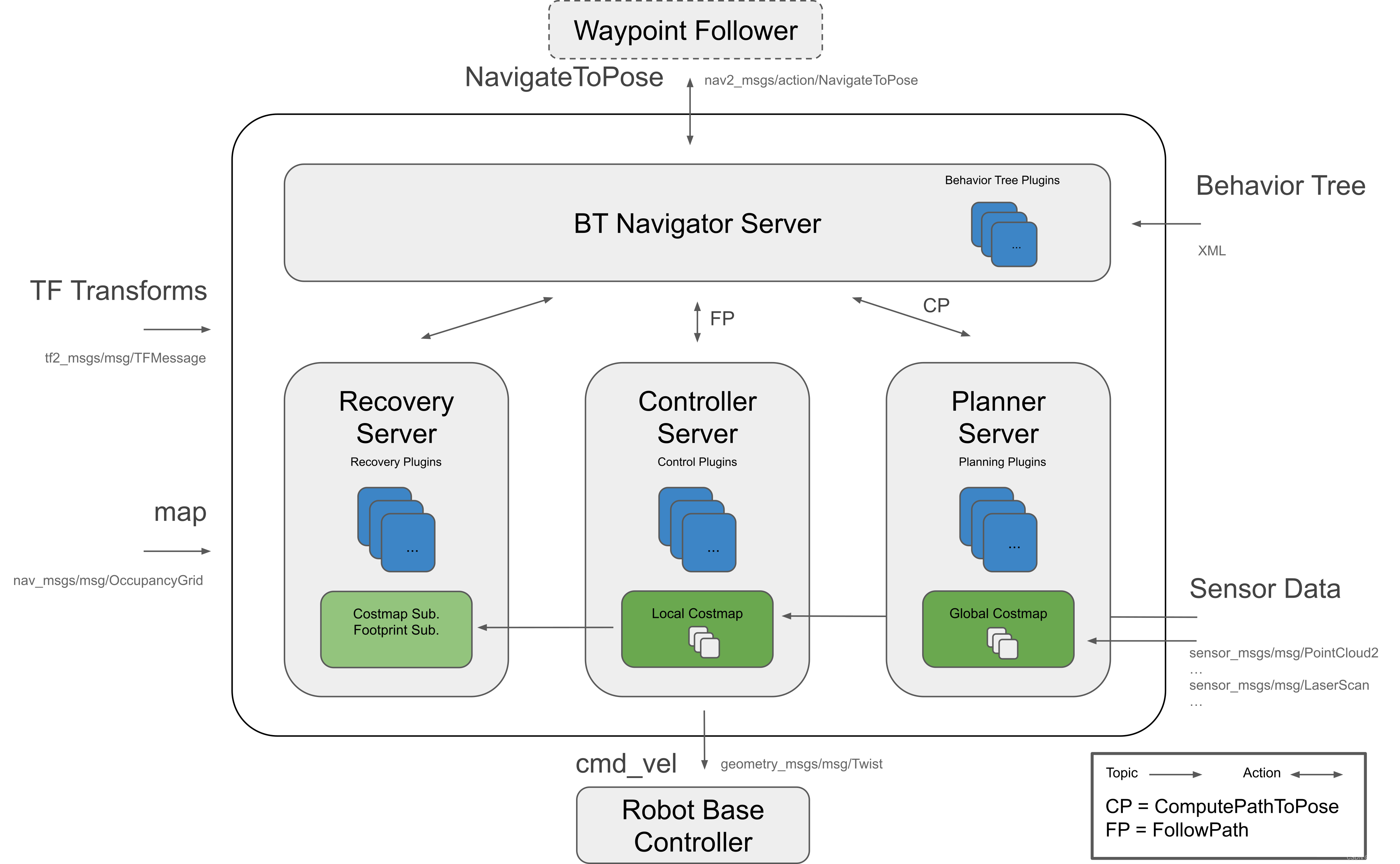
ROS2+nav2+激光雷达导航(上)
目录 写在前面安装nav2nav2介绍nav2实践map地图保存地图读取 状态估计(TF变换)所需TF坐标base_link -> sensor framesodom -> base_linkLaser Scan Matcher for ROS2 map -> odomAMCL使用AMCL参数配置文件amcl_config.yaml 效果过程中的知识点一、launch文件编写格式及…

sensei鼠标测试软件,「硬核测试:游戏鼠标精准度」赛睿SENSEI 310
原标题:「硬核测试:游戏鼠标精准度」赛睿SENSEI 310 作为赛睿最热销游戏鼠标之一,310有SENSEI(对称)和RIVAL(右手)两个版本,均采用今天要测的TrueMove3引擎,是基于PMW3360打造的1:1真实追踪的引擎,虽然现在…

sensei鼠标测试软件,'黑科技'传感器打造出的FPS利器 - 赛睿Sensei 310 鼠标
黑科技传感器打造出的FPS利器 - 赛睿Sensei 310 鼠标 2018-03-12 10:00:00 10点赞 13收藏 20评论 *级电竞外设品牌SteelSeries赛睿2017年在鼠标领域依靠Rival系列攻城掠地, 从低到高都有覆盖,但Rival系列全系都是右手的人体工学设计,对于喜欢对称设计的玩…

ROS小车+Velodyne16线+legoloam仿真
系统使用Ubuntu18.04 ros1
一、建立catkin工作空间
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
上述三步建立了catkin工作空间并将其初始化
工作空间创建完毕后要对其进行编译
$ cd ~/catkin_ws
$ catkin_make
这里需要注意catkin_…
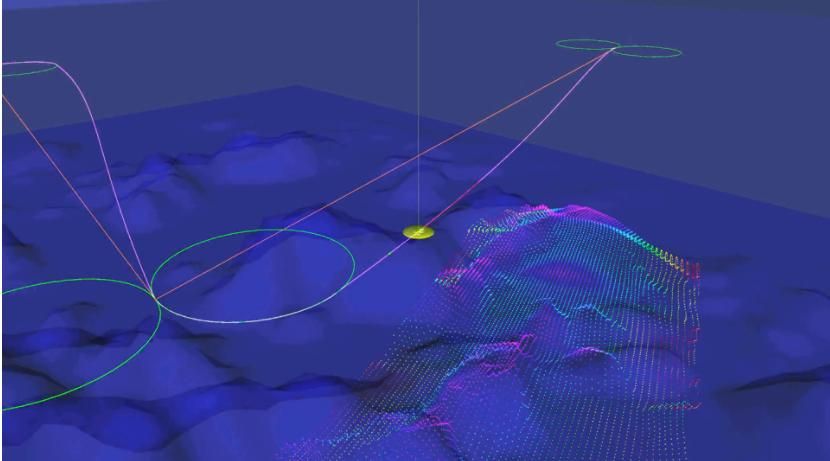
支持ROS2的海上机器人研究人员的开源模拟器Plankton
支持ROS2的海上机器人研究人员的开源模拟器Plankton
鱼香ROS介绍: 鱼香ROS是由机器人爱好者共同组成的社区,欢迎一起参与机器人技术交流。 进群加V:fishros2048 文章信息: 标题:支持ROS2的海上机器人研究人员的开源模…
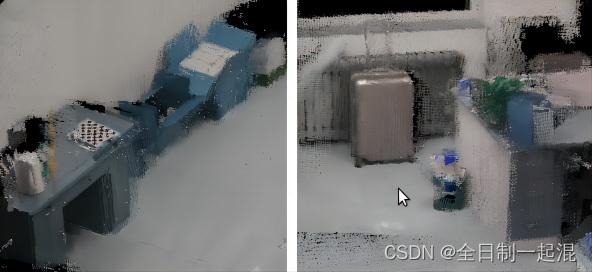
实测 (三)NVIDIA Xavier NX + D435i / 奥比中光Astrapro 相机+ ORB-SLAM 2 + 3 稠密回环建图
开发环境:NXUbuntu18.04ROS-melodic
接着上篇,使用奥比中光的Astrapro相机(乐视三合一相机)orb-slam2稠密回环建图
依然先放上效果图: 三、NX Astrapro相机orb-slam2 稠密回环建图
3.1 安装奥比中光Astrapro的SDK …