安装moveit!
因为已安装好ros和Ubuntu系统为基础,就不多介绍怎么安装了。在桌面打开终端输入
sudo apt install ros-noetic-moveit
运动规划库就装好了
安装ur机器人的驱动
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make上面是创建工作空间和编译
编译完后记得source或直接写入bash文件里
source devel/setup.bash再打开终端进入工作空间进行下载驱动
cd ~/catkin_ws/
git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git src/Universal_Robots_ROS_Driver
git clone -b calibration_devel https://github.com/fmauch/universal_robot.git src/fmauch_universal_robot
git clone https://github.com/ros-industrial/ur_msgs.git src/ur_msgs
rosdep update
rosdep install --from-paths src --ignore-src -y
下载完成后进行编译
catkin_make
如果有依赖项缺失可以用下面的语句加上依赖的东西(xxxConfig之前的)
记得把"_"改成"-"
sudo apt-get install ros-noetic-xxxx然后我们打开终端测试一下
roslaunch ur_gazebo ur5_bringup.launch
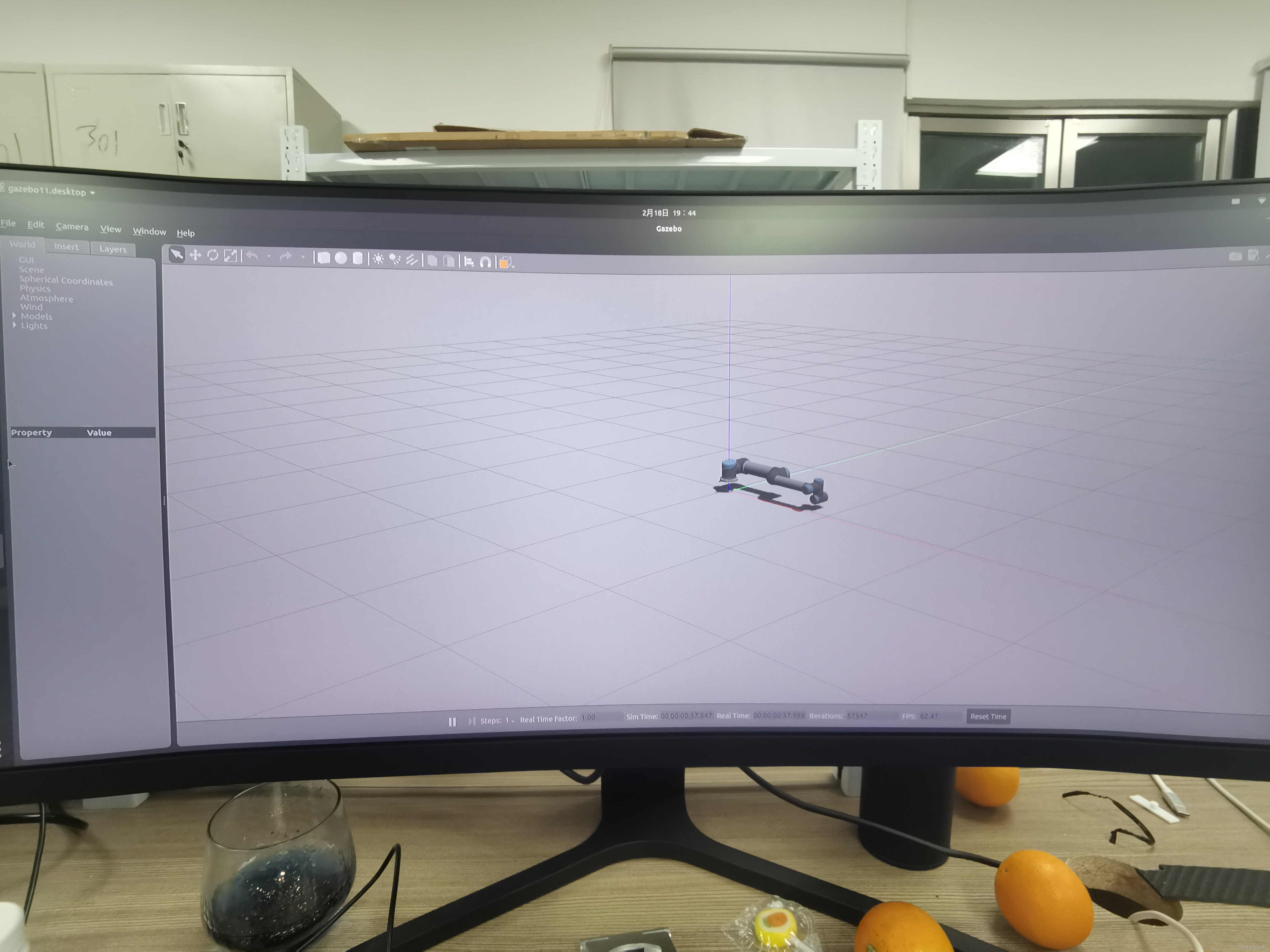
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
roslaunch ur5_moveit_config moveit_rviz.launch config:=true 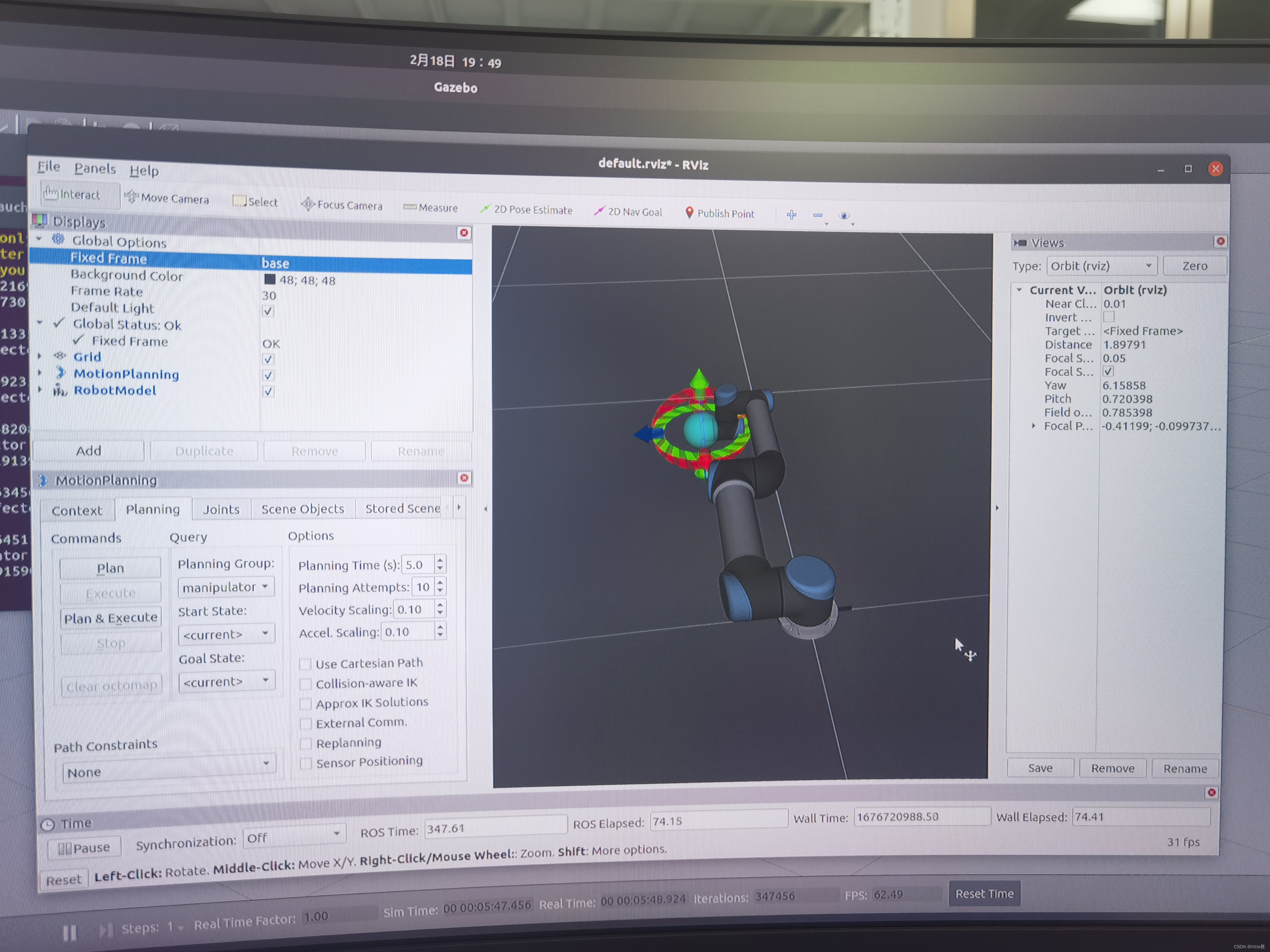
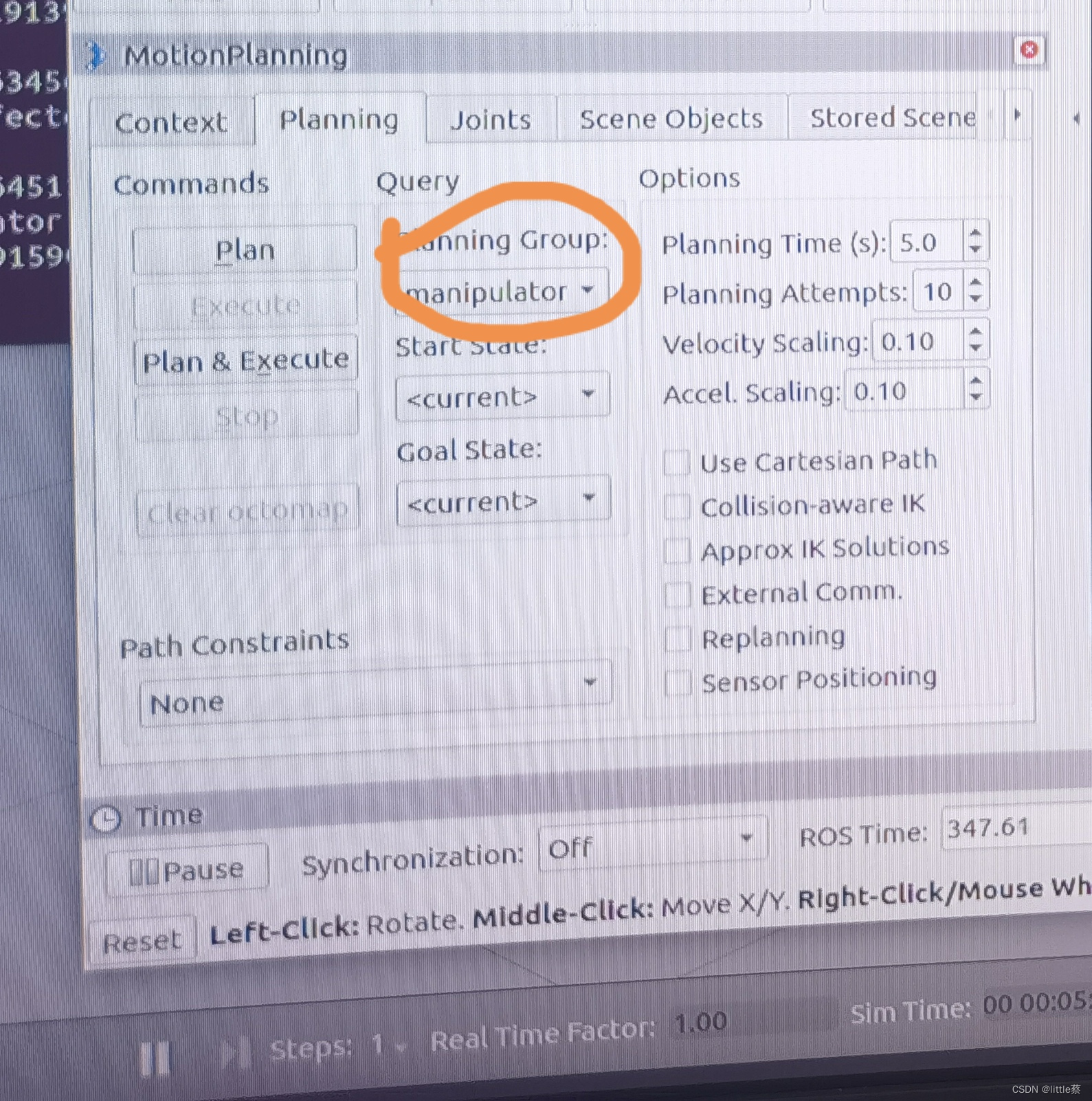
打开rviz后选择添加MotionPlanning和RobotModel
将坐标系(Fixed Frame)改为base
plan是计划
execute是执行
连接实体机械臂
先查看机械臂的软件版本
可以通过开机界面或关于里查看
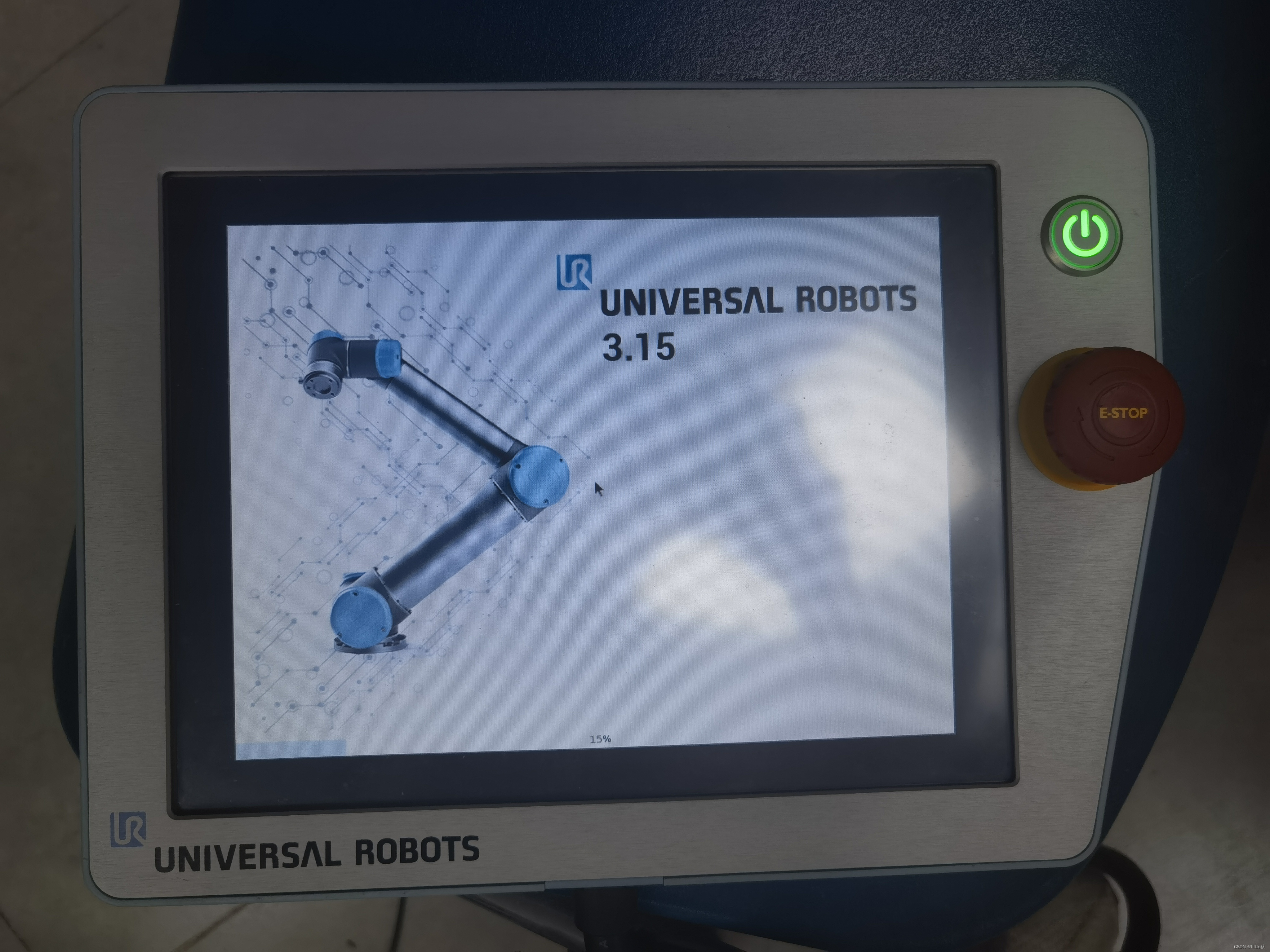
 测试过后发先20。04的系统和3。15之后的链接最好。
测试过后发先20。04的系统和3。15之后的链接最好。
如果是早期版本可以通过网站下载,注意的是cb系列只能逐级升级,不能跳跃升级!https://www.universal-robots.com/articles/ur/documentation/legacy-download-center/
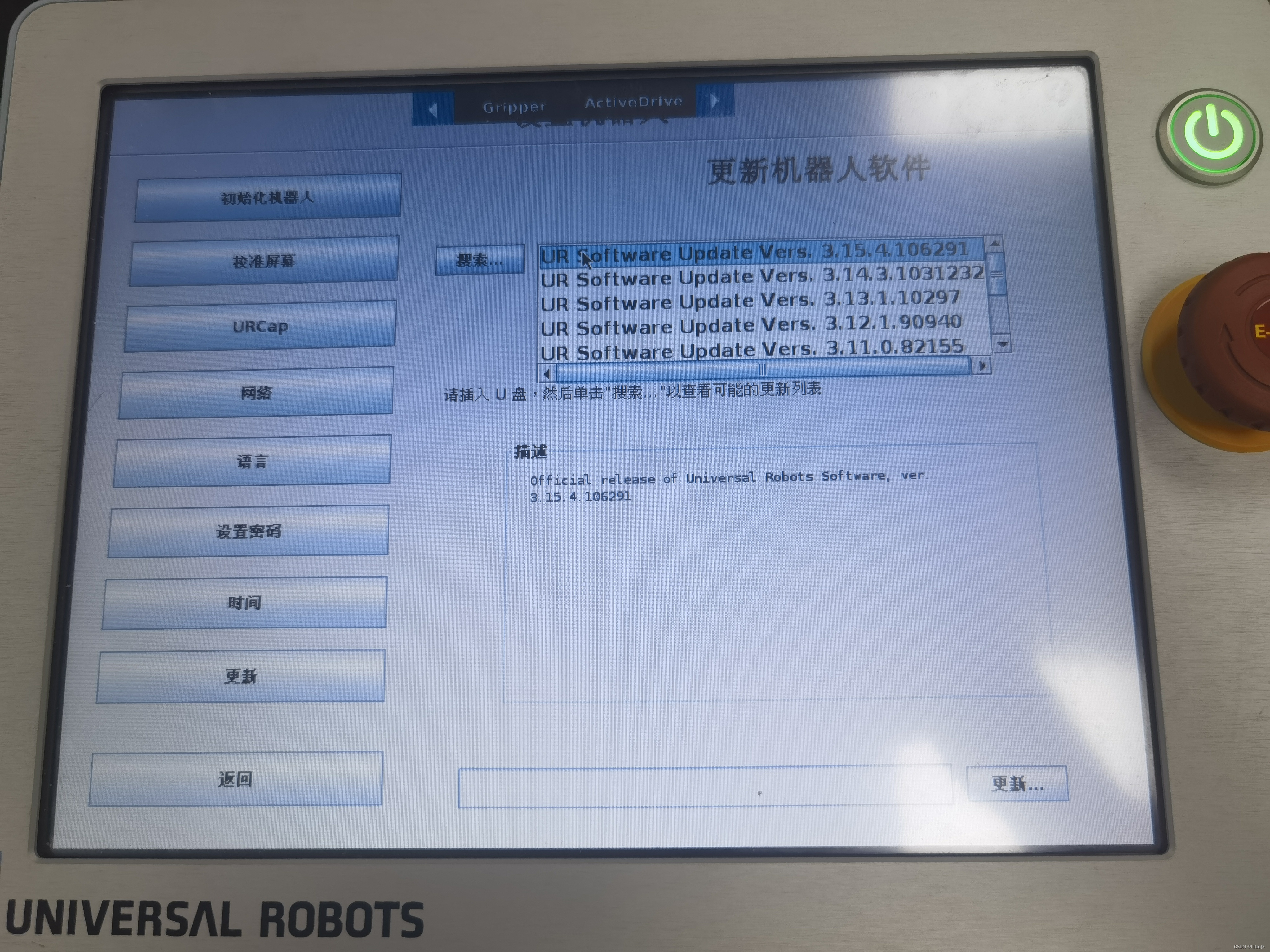
下载好升级文件后用fat32的U盘保存插入示教器侧面USB口

插入后点击设置机器人-更新-搜索-更新,完成机器人更新
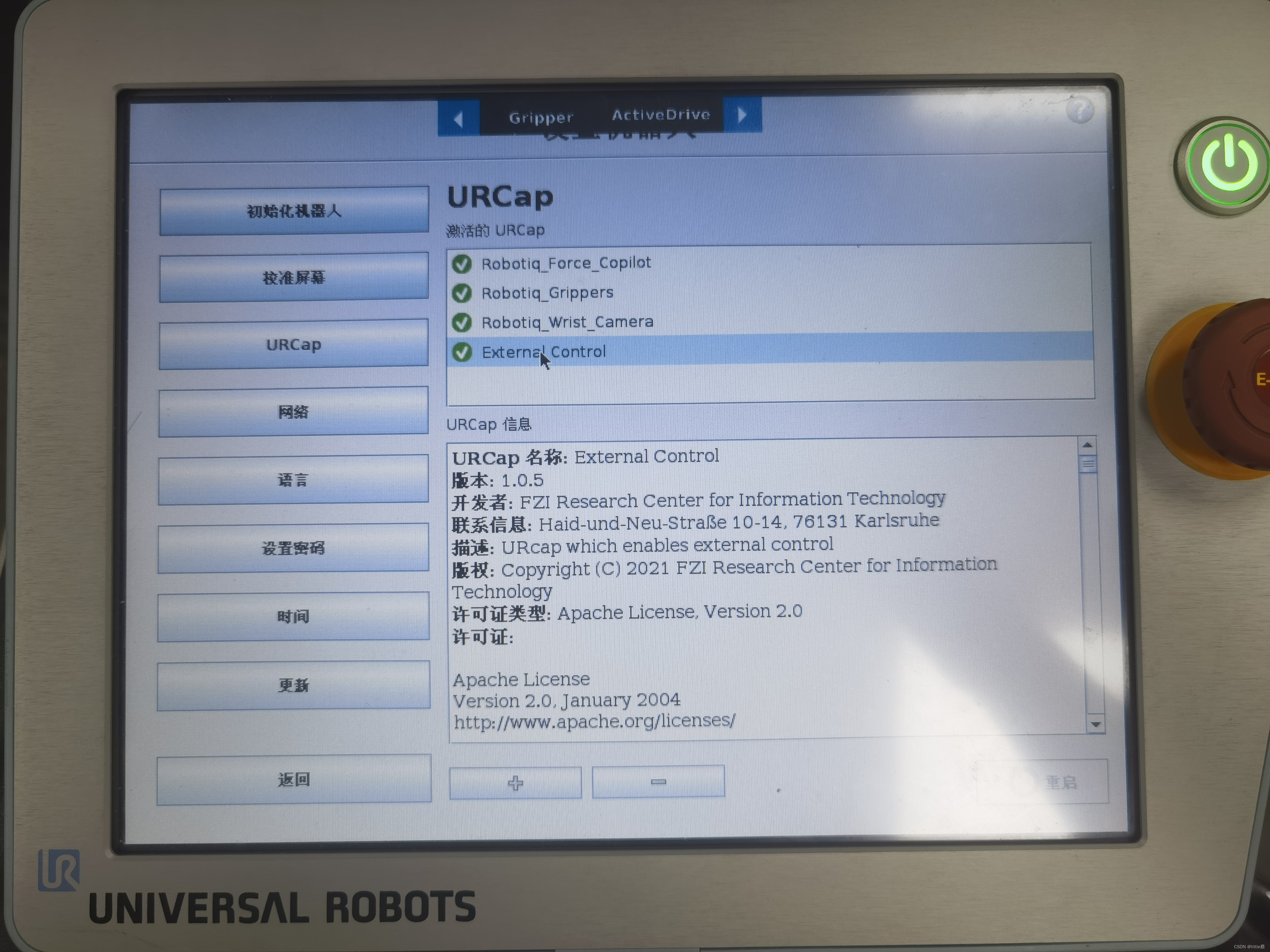
更新完成后下载插件,网址
Universal_Robots_ROS_Driver/externalcontrol-1.0.5.urcap at 130635a7259f5a04d8928ff67deb74a75f2720c3 · UniversalRobots/Universal_Robots_ROS_Driver · GitHub
在urcap里添加插件
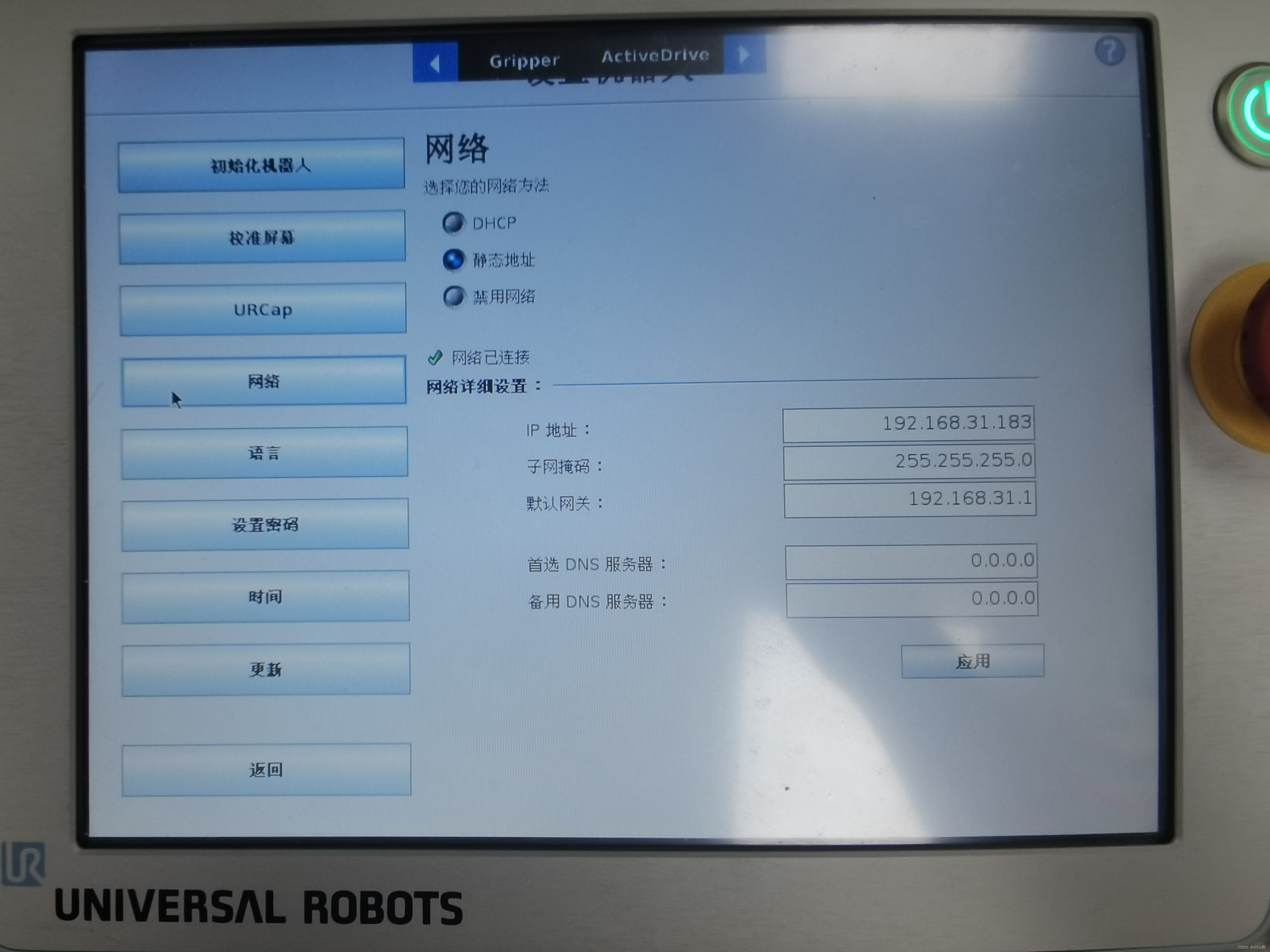
将机器人连上网络,并进行ip分配,需要和主机在一个网段下,可以通过ping命令测试是否联通。
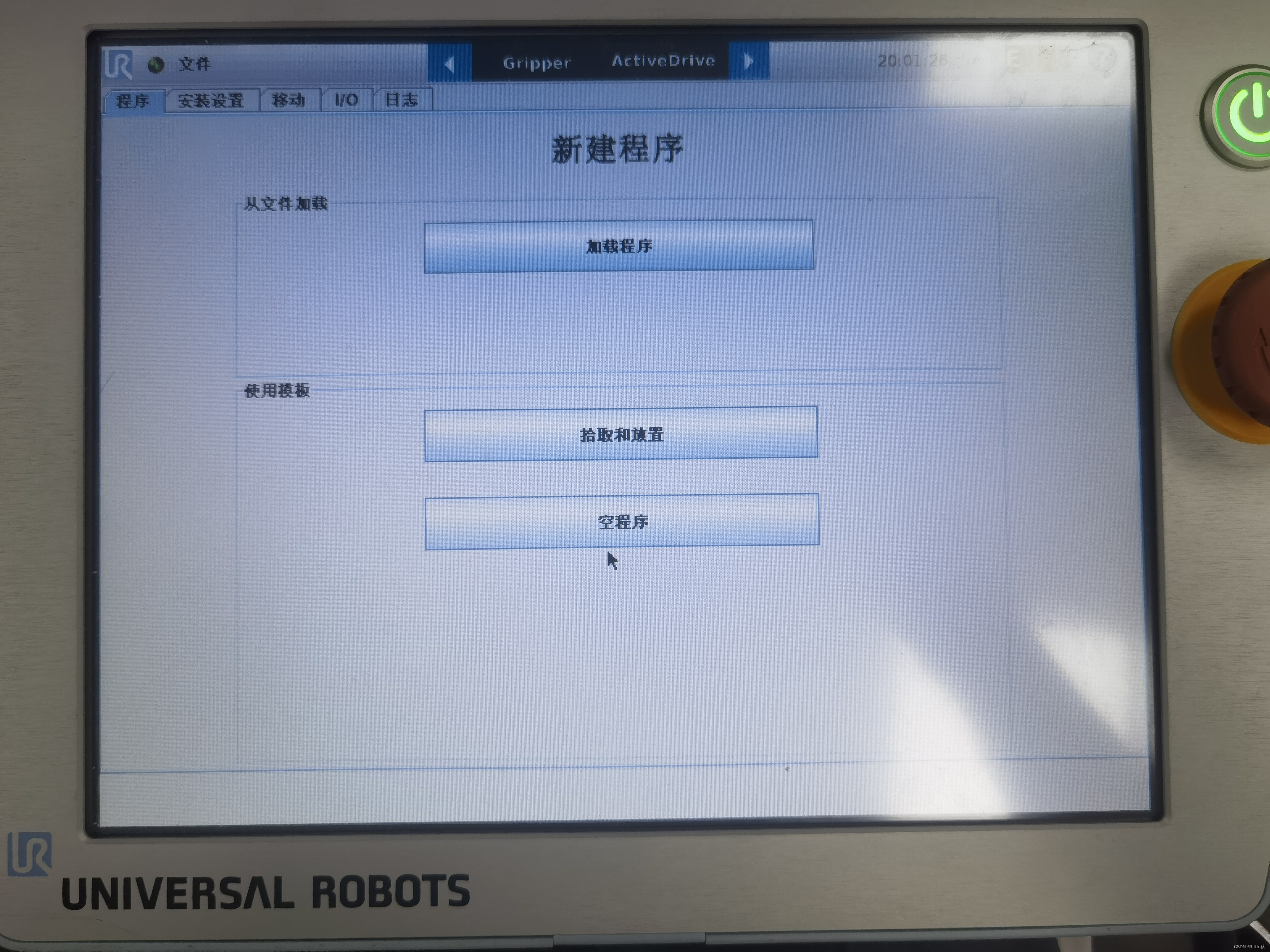
选择为机器人编程,第一次就使用空程序。
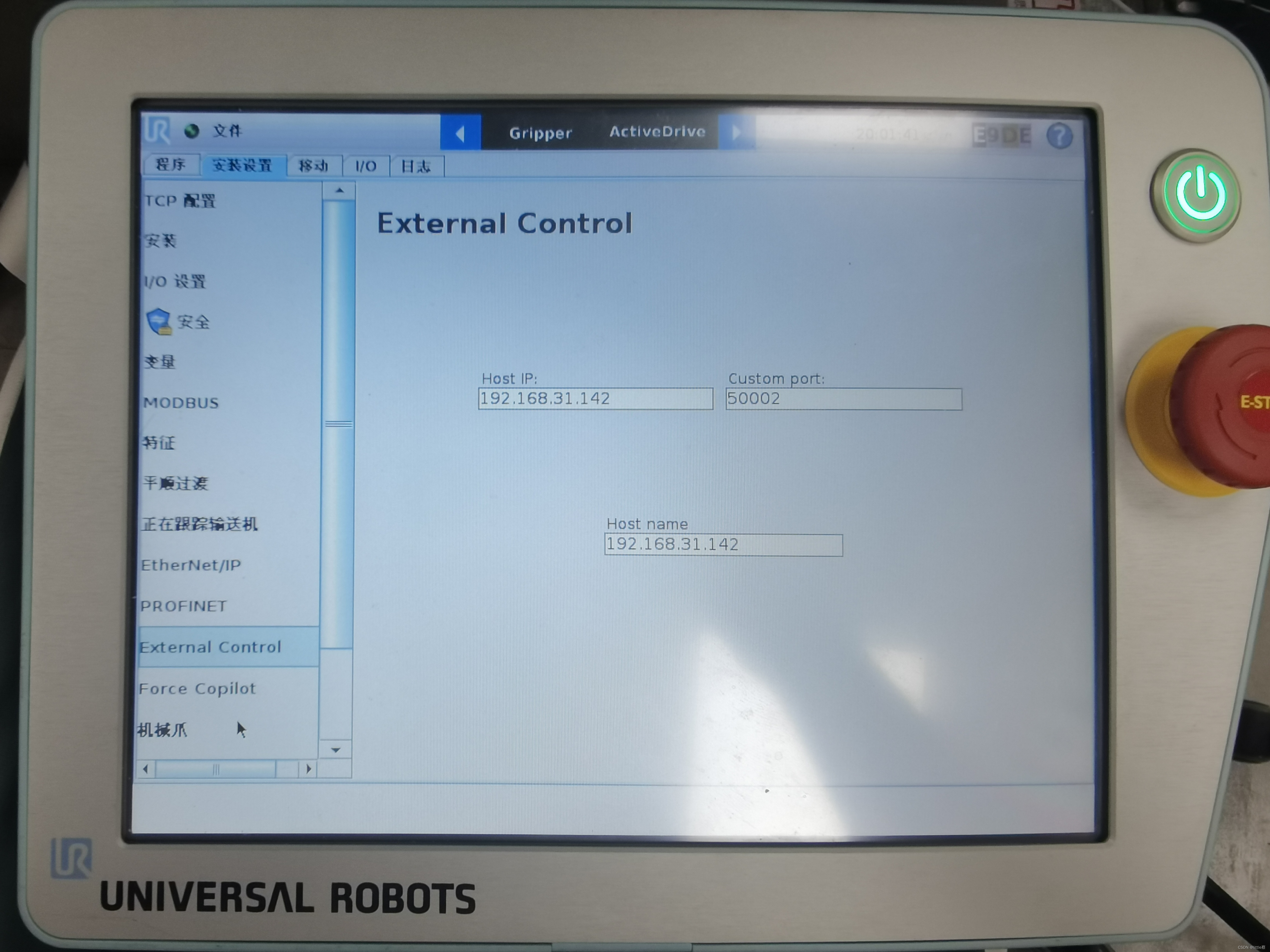
在安装设置中找到刚刚安装的External Control输入主机的ip地址,但端口不能修改!
然后在程序中找到urcap中我们所需要的插件如图
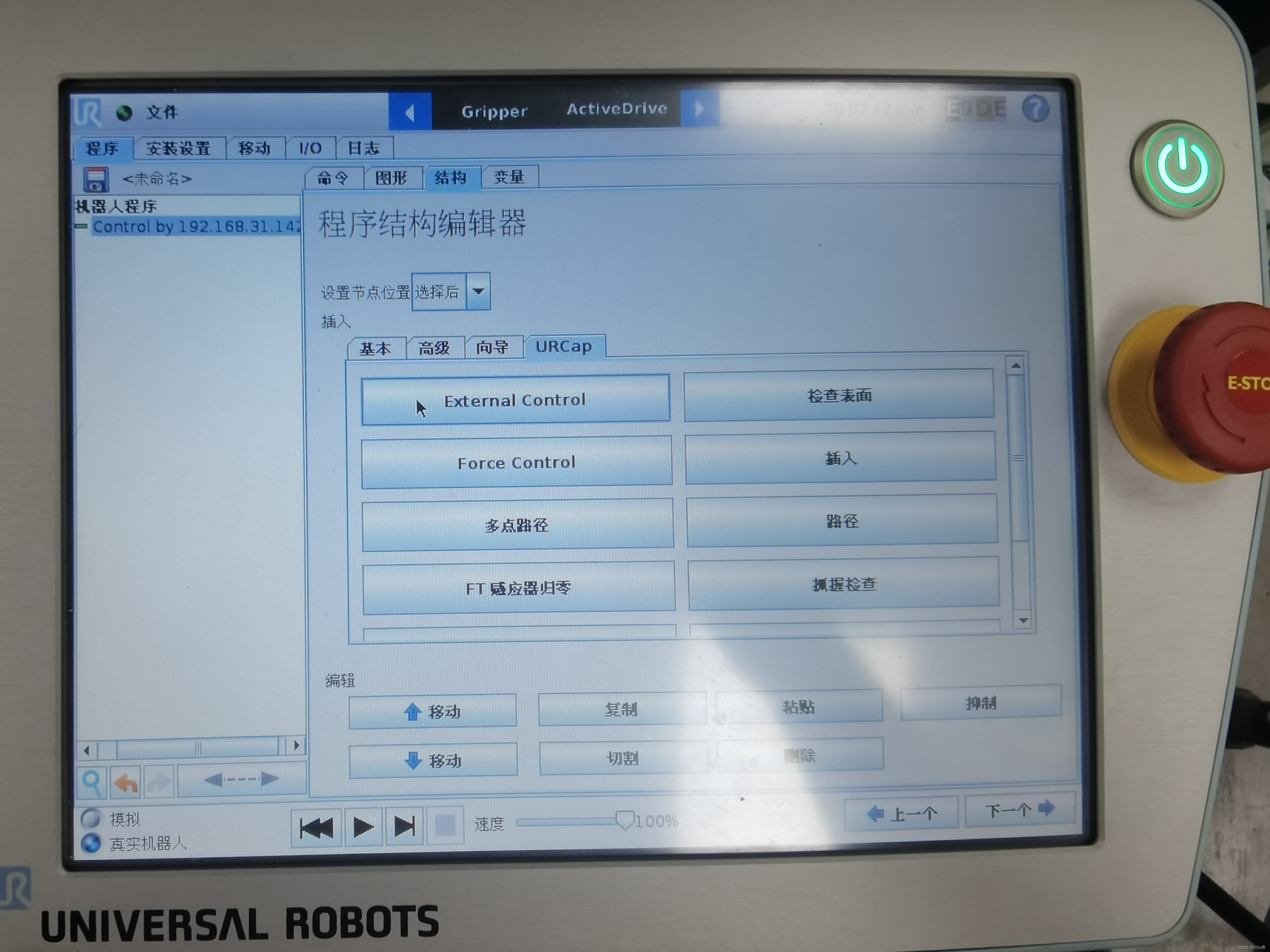
在主机终端输入代码
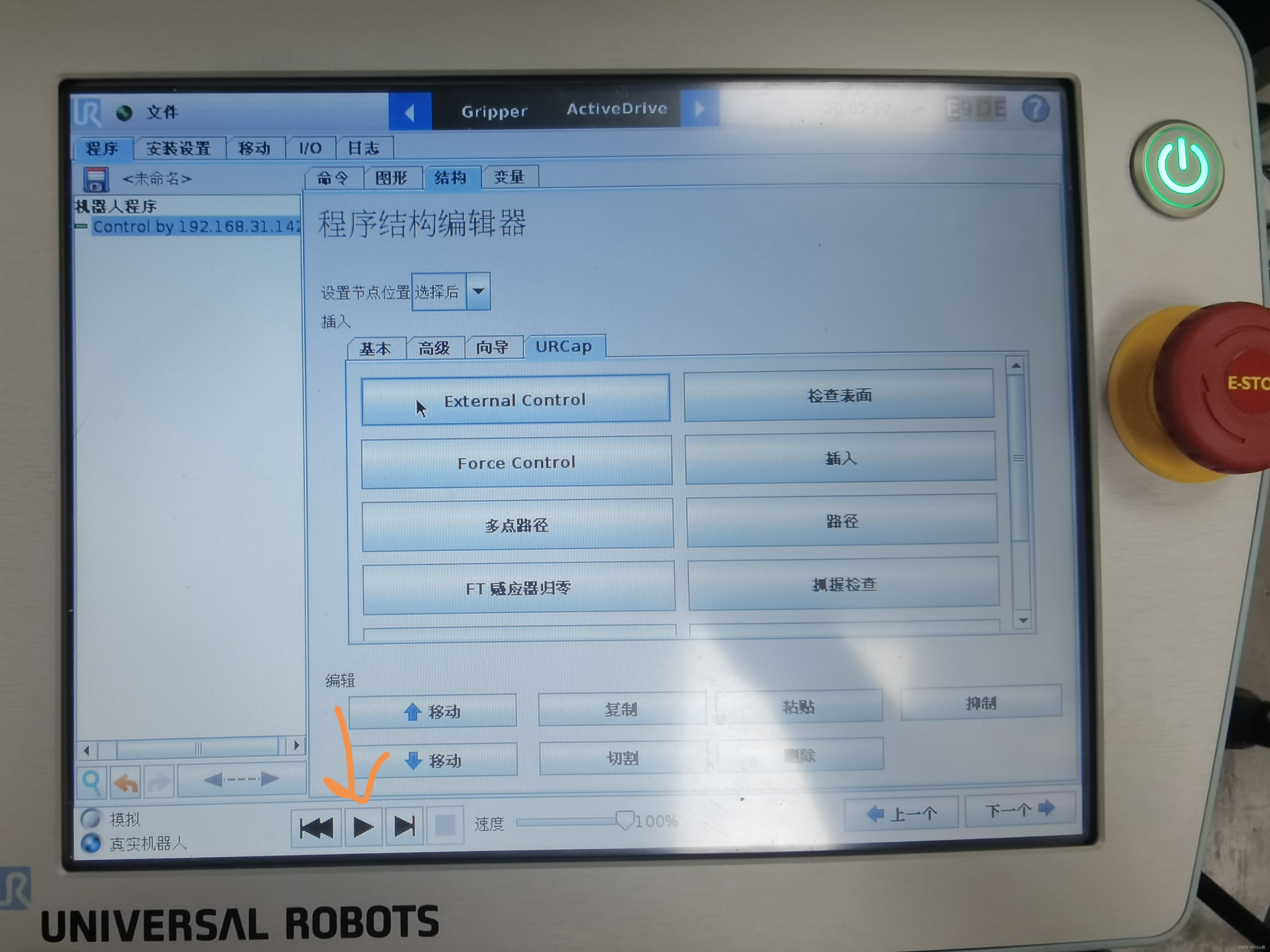
roslaunch ur_robot_driver ur5_bringup.launch limited:=true robot_ip:=xxx运行成功后点击示教器的执行程序键
再另开两个终端分别输入 (打开moveit!和rviz)
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch limited:=trueroslaunch ur5_moveit_config moveit_rviz.launch config:=true让后和上面测试仿真一样可以看到实物机器人按路径规划运动。至此ur5 moveit实物驱动实现完毕。