目录
背影
摘要
LSTM的基本定义
LSTM实现的步骤
基于长短期神经网络LSTM的股票预测
MATALB编程实现,附有代码:基于长短期神经网络的居民用电负荷预测,基于LSTM的居民用电功率预测资源-CSDN文库 https://download.csdn.net/download/abc991835105/88184783
效果图
结果分析
展望
参考论文
背影
居民用电量是时间序列数据,用长短期神经网络能提高预测的准确率
摘要
LSTM原理,MATALB编程长短期神经网络LSTM的居民用电量预测预测,居民用电负荷预测。
LSTM的基本定义
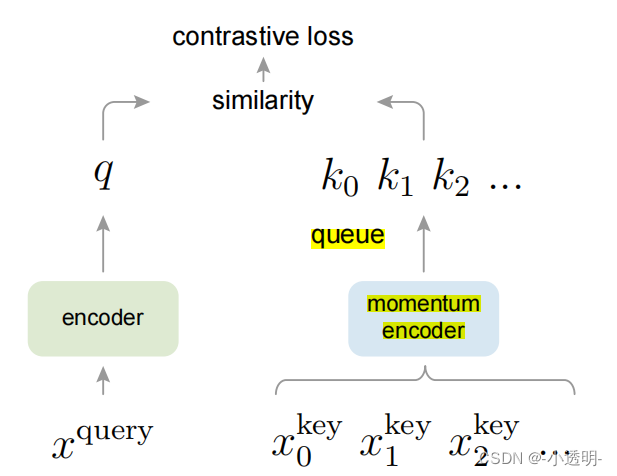
LSTM是一种含有LSTM区块(blocks)或其他的一种类神经网络,文献或其他资料中LSTM区块可能被描述成智能网络单元,因为它可以记忆不定时间长度的数值,区块中有一个gate能够决定input是否重要到能被记住及能不能被输出output。
图1底下是四个S函数单元,最左边函数依情况可能成为区块的input,右边三个会经过gate决定input是否能传入区块,左边第二个为input gate,如果这里产出近似于零,将把这里的值挡住,不会进到下一层。左边第三个是forget gate,当这产生值近似于零,将把区块里记住的值忘掉。第四个也就是最右边的input为output gate,他可以决定在区块记忆中的input是否能输出 。
图1 LSTM模型
图1 LSTM模型
LSTM有很多个版本,其中一个重要的版本是GRU(Gated Recurr