目录
一、什么是Fisher 准则
二、具体实例
三、代码实现
四、结果
一、什么是Fisher 准则
Fisher准则,即Fisher判别准则(Fisher Discriminant Criterion),是统计学和机器学习中常用的一种分类方法,由统计学家罗纳德·费师(Ronald Fisher)在1936年提出。它的主要目的是找到一个特定的方向,通过将数据投影到这个方向上,使得不同类别的数据在这个新的维度上能够实现最好的分类效果。
Fisher准则的核心思想是:
- 最大化不同类别数据的均值之间的距离。
- 同时最小化每个类别内部数据的方差。

二、具体实例
已知有两类二维样本数据如下:
w1 中数据点的坐标对应:
x1 = 0.23, 1.52, 0.65, 0.77, 1.05, 1.19,
0.29, 0.25, 0.66, 0.56, 0.90, 0.13,
-0.54, 0.94, -0.21, 0.05, -0.08, 0.73,
0.33, 1.06, -0.02, 0.11, 0.31, 0.66
y1 = 2.34, 2.19, 1.67, 1.63, 1.78, 2.01,
2.06, 2.12, 2.47, 1.51, 1.96, 1.83,
1.87, 2.29, 1.77, 2.39, 1.56, 1.93,
2.20, 2.45, 1.75, 1.69, 2.48, 1.72
W2 中数据点的坐标对应:
x2 = 1.40, 1.23, 2.08, 1.16, 1.37, 1.18,
1.76, 1.97, 2.41, 2.58, 2.84, 1.95,
1.25, 1.28, 1.26, 2.01, 2.18, 1.79,
1.33, 1.15, 1.70, 1.59, 2.93, 1.46
y2 = 1.02, 0.96, 0.91, 1.49, 0.82, 0.93,
1.14, 1.06, 0.81, 1.28, 1.46, 1.43,
0.71, 1.29, 1.37, 0.93, 1.22, 1.18,
0.87, 0.55, 0.51, 0.99, 0.91, 0.71
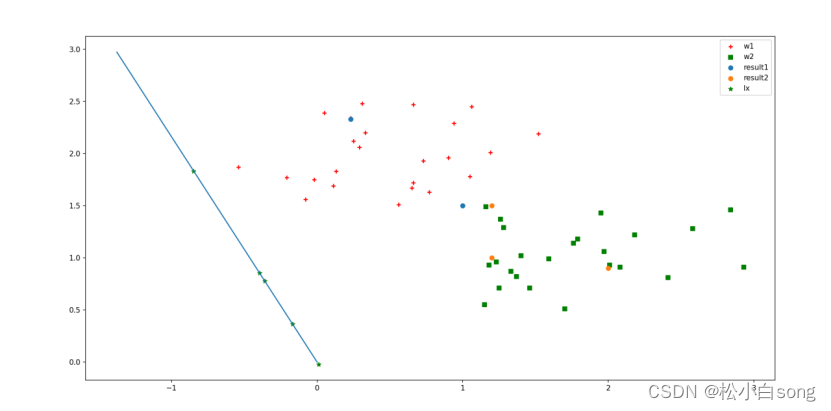
(1)利用上面数据确定并画出 Fisher 准则下的最优投影方向,给出分类阈值。
(2)根据所得结果判断(1,1.5),(1.2,1.6),(2.0,0.9),(1.2,1.3),(0.23,2.7), 并画出数据分类相对应的结果图,要求画出其在 W 上的投影。
三、代码实现
import numpy as np
import math
import matplotlib.pyplot as plt
x1=[0.23,1.52,0.65,0.77,1.05,1.19,0.29,0.25,0.66,0.56,0.90,0.13,-0.54,0.94,-0.21,0.05,-0.08,0.73,0.33,1.06,-0.02,0.11,0.31,0.66]
y1=[2.34,2.19,1.67,1.63,1.78,2.01,2.06,2.12,2.47,1.51,1.96,1.83,1.87,2.29,1.77,2.39,1.56,1.93,2.20,2.45,1.75,1.69,2.48,1.72]
x2=[1.40,1.23,2.08,1.16,1.37,1.18,1.76,1.97,2.41,2.58,2.84,1.95,1.25,1.28,1.26,2.01,2.18,1.79,1.33,1.15,1.70,1.59,2.93,1.46]
y2=[1.02,0.96,0.91,1.49,0.82,0.93,1.14,1.06,0.81,1.28,1.46,1.43,0.71,1.29,1.37,0.93,1.22,1.18,0.87,0.55,0.51,0.99,0.91,0.71]
#将矩阵整合为w1、w2
w1=[[0 for i in range(2)]for i in range(24)]
w2=[[0 for i in range(2)]for i in range(24)]
for i in range(24):w1[i][0]=x1[i]w1[i][1]=y1[i]w2[i][0]=x2[i]w2[i][1]=y2[i]
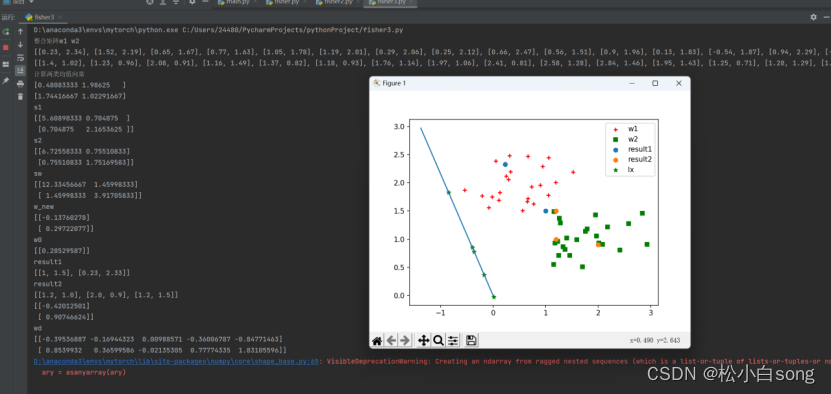
print('整合矩阵w1 w2')
print(w1)
print(w2)
#计算两类均值向量
m1=np.mean(w1,0)#mean(matrix,axis=0),matrix填写一个矩阵,axis 0代表:压缩行,对各列求均值
m2=np.mean(w2,0)#axis 1代表:压缩列,对各行求均值
print('计算两类均值向量')
print(m1)
print(m2)#计算总的类内离散度矩阵Sw=s1+s2
s10=[0,0]
s20=[0,0]
s1=[[0 for i in range(2)]for j in range(2)]#2*2
s2=[[0 for i in range(2)]for j in range(2)]
for i in range(24):#这里要注意矩阵的转置s10[0]=(w1[i][0]-m1[0])s10[1]=(w1[i][1]-m1[1])s11=np.mat(s10)#将list变为矩阵s1+=np.mat((s11.T)*s11)#这里和书上公式相反,因为设置的时候和书上不一样,想到得到2*2的矩阵就必须换个方向s20[0]=(w2[i][0]-m2[0])s20[1]=(w2[i][1]-m2[1])s22=np.mat(s20)s2+=np.mat((s22.T)*s22)
print('s1')
print(s1)
print('s2')
print(s2)
sw=s1+s2
print('sw')
print(sw)#计算投影方向和阈值
w_new=(np.mat(sw)).I*(np.mat((m1-m2)).T)
print('w_new')
print(w_new)
#这里因为考虑先验概率
m1_new=m1*w_new#这里的顺序很重要,因为前面设置的时候没有注意,所以写的时候要注意一下
m2_new=m2*w_new
pw1=0.6
pw2=0.4
w0=(m1_new+m2_new)/2-math.log(pw1/pw2)/(24+24-2)
print('w0')
print(w0)#对测试数据进行分类判别
x=[[1,1.5],[1.2,1.0],[2.0,0.9],[1.2,1.5],[0.23,2.33]]
result1=[]
result2=[]
for i in range(5):y=np.mat(x[i])*w_new#这里的顺序依然要小心if y>w0[0][0]:result1.append(x[i])else:result2.append(x[i])
print('result1')
print(result1)
print('result2')
print(result2)#计算试验点在w_new方向上的点
w_k=np.mat(np.zeros((2,1)))#归一化
w_k[0]=w_new[0]/(np.linalg.norm(w_new,ord=2,axis=None,keepdims=False))#使用二范数进行归一化
w_k[1]=w_new[1]/(np.linalg.norm(w_new,ord=2,axis=None,keepdims=False))
print(w_k)
wd=np.mat(np.zeros((2,5)))
for i in range(5):wd[:,i]=(np.mat(x[i])*(w_k*w_k.T)).T
print('wd')
print(wd)#显示分类结果
mw1=np.mat(w1)
mw2=np.mat(w2)
mr1=np.mat(result1)
mr2=np.mat(result2)
p1=plt.scatter(mw1[:,0].tolist(),mw1[:,1].tolist(),c='red',marker='+')#画出w1类的各点
p2=plt.scatter(mw2[:,0].tolist(),mw2[:,1].tolist(),c='green',marker='s')#画出w2类的各点
p3=plt.scatter(mr1[:,0].tolist(),mr1[:,1].tolist())#画出测试集中属于w1的各点
p4=plt.scatter(mr2[:,0].tolist(),mr2[:,1].tolist())#画出测试集中属于w2的各点
p5=plt.plot([0,10*w_new[0]],[0,10*w_new[1]])#画出最佳投影方向
p6=plt.scatter(wd.T[:,0].tolist(),wd.T[:,1].tolist(),c='g',marker='*')#画出测试集各点在投影方向上的投影点
plt.legend([p1,p2,p3,p4,p6],['w1','w2','result1','result2','lx'])
#plt.legend([p5],['line'])
plt.show()四、结果