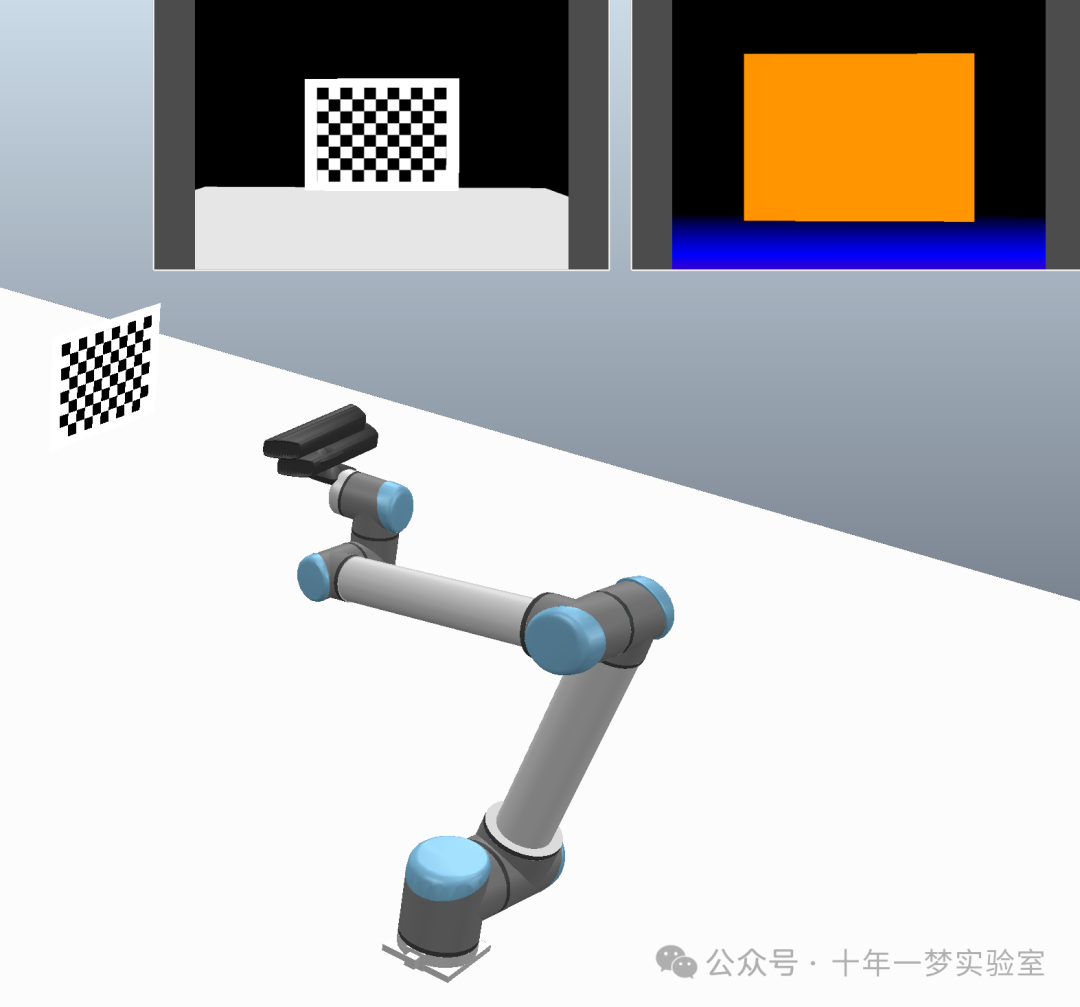
实现在CoppeliaSim环境中进行手眼标定和目标追踪的一个例子。它主要涉及到机器人、机器视觉和控制算法的编程,使用了Python语言。接下来对该代码的主要类和方法进行解析:
1. 导入相关库
用于与CoppeliaSim模拟器通过ZeroMQ接口通信。
包含
Rotation类,用于执行各种旋转和方向变换操作。OpenCV库,用于执行各种图像处理和计算机视觉任务。
用于执行各种数学和矩阵运算。
用于进行图像和数据的可视化。
用于创建和操作迭代对象的库。
用于实现与时间相关的功能。
2. 定义全局变量
分别用于定义场景路径、等待间隔、超时时间、接受的旋转误差、接受的平移误差、接受的停止速度阈值。
3. 定义主要的方法和步骤
连接到CoppeliaSim模拟器。
获取模拟器中对象的句柄。
从摄像头获取图像,并将其转换为OpenCV的BGR格式。
设置从一个坐标帧到另一个坐标帧的变换矩阵。
获取从一个坐标帧到另一个坐标帧的变换矩阵。
计算实际位姿与目标位姿之间的误差。
等待机器人移动到目标位姿,直到误差足够小或超时。
设置目标位姿并等待机器人移动完成。
4. 实施手眼标定和目标追踪
使用二维码检测来定位目标,然后进行相机标定和手眼标定计算。
计算机器人末端和摄像头之间的相对位姿。
实现了一系列的图像获取和处理,利用OpenCV库进行棋盘角点的提取。
通过实验获取数据,计算相机内部参数和两个相机之间的位姿。
实现了基于不同位姿下的图像集合进行手眼标定。
完成了在模拟器中交互式地跟踪目标的过程。
5. 保存与加载数据
使用方法来压缩和保存相关数据,以便后续的分析和使用。
本代码的特点在于它结合了机器人控制、图像处理、手眼标定和交互式目标追踪等多个领域的技术,是一套完整的解决方案。
视频演示
源码解析
函数
1. 通过ZeroMQ远程API连接到CoppeliaSim:创建客户端实例,获取CoppeliaSim API的实例,停止当前模拟,加载模拟场景,开始模拟,返回客户端和sim实例
2. 获取对象句柄: 获取机器人基座的句柄,获取机器人末端执行器的句柄,获取第一个相机的句柄,获取第二个相机的句柄,获取目标球的句柄
3. 定义从CoppeliaSim视觉传感器获取图像并转换为OpenCV格式的BGR图像的函数:从指定相机获取图像数据,将获取的图像数据转换为NumPy数组并重塑为正确的形状,将图像在垂直方向上翻转,以符合OpenCV的图像显示方式
4. 定义设置给定对象在某个参考框架下的位姿(位置和姿态)的函数:设置对象的变换矩阵,以定义其位置和方向
5. 定义获取给定对象在某个参考框架下的位姿的函数:初始化为4x4的单位矩阵,获取对象的变换矩阵并重塑,组成位姿矩阵
6. 定义计算两个位姿之间误差的函数:计算平移误差,计算旋转误差,将旋转误差转换为角度
7.定义等待机器人移动到目标位姿的函数:记录开始时间,初始化误差值为无穷大,计算已经经过的时间,如果超时则返回失败,等待一定时间,获取当前位姿,获取当前速度,计算线速度均值,计算角速度均值,计算误差,如果误差小于阈值且速度接近零,则返回成功
8. 定义设置目标位姿并等待机器人移动完成的函数:设置目标位姿,等待机器人移动到目标位姿并返回结果
主程序
########## 定义场景路径、等待间隔、超时时间以及接受的误差
设置NumPy打印选项
定义场景路径
定义等待时间间隔,单位秒
定义超时时间,单位秒
接受的旋转误差阈值
接受的平移误差阈值
接受的停止速度阈值
连接到CoppeliaSim并开始模拟
获取必要的句柄
########### 设置图像的检测、摄像机标定参数,并检测棋盘格角点
初始化棋盘格检测所需的终止条件:设置寻找亚像素角点的精确度和最大迭代次数,设置相机标定时需要固定的参数
设置棋盘格的尺寸和单位长度:棋盘格的行和列,示例尺寸,根据实际需要调整,单位长度,以米为单位,初始化棋盘格的三维坐标,设置棋盘格上每个点的x,y坐标,z坐标默认为0
从第一个相机获取BGR图像
获取图像的高度和宽度
将图像从BGR转换为灰度图
寻找棋盘格角点
对角点坐标进行精确化
在图像上绘制并显示棋盘格角点
获取机器人末端执行器的原始位姿
定义平移和旋转参数
构建平移和旋转矩阵
设置末端执行器到目标位姿并等待动作完成
显示相机1获取的图像
将末端执行器复位到原始位姿
显示相机1获取的图像
显示相机2获取的图像
########### 构建多个位姿变换矩阵,以便在手眼标定实验中使用
定义平移和旋转的范围
根据定义的范围生成一系列变换矩阵
计算生成的变换矩阵数量
########### 使用生成的位姿变换矩阵收集用于手眼标定的数据
初始化相机1、2图像点和对象点的列表,用于相机标定
定义机器人末端执行器的位姿列表、相机1拍摄的图像列表、相机2拍摄的图像列表
遍历所有预设的变换矩阵:{计算目标位姿,移动机器人末端执行器到目标位姿,如果移动失败,则跳过此次循环。获取当前机器人末端执行器的位姿,从相机1获取图像,并找到棋盘格角点,显示找到的角点,从相机2获取图像,并找到棋盘格角点,显示找到的角点,将找到的角点和对应的对象点分别存入列表,将图像存入相应列表}
计算成功捕获棋盘格角点的图像数量
########### 对两个相机分别进行标定获取内参和畸变系数
分别对两个相机进行标定,获取相机内参矩阵和畸变系数
输出相机内参矩阵和畸变系数
########### 进行立体标定获取两相机之间的旋转和平移矩阵
进行立体标定,获取两个相机间的相对位姿关系()

从仿真场景获取两个相机间的位姿关系
########### 初始化手眼标定所需的矩阵列表
初始化手眼标定所需的数据结构:{机器人夹持器到基座的旋转矩阵列表, 标定板到相机的旋转矩阵列表,机器人夹持器到基座的平移向量列表,标定板到相机的平移向量列表 }
############ 遍历采集的相机1每个图像点、对象点、末端执行器位姿以及图像
遍历每组图像点、对象点、末端执行器位姿以及图像:{ 使用solvePnP求解标定板相对于相机的位姿,在图像中绘制坐标轴并显示,构造标定板到相机的变换矩阵,将求解得到的旋转矩阵和平移向量添加到列表中 }
使用cv2.calibrateHandEye进行相机1手眼标定,求解夹持器到相机1的变换矩阵

输出夹持器到相机1的变换矩阵
定义OpenGL到OpenCV的坐标系统转换矩阵
从场景获取末端执行器到相机1的位姿,并进行坐标系统转换
根据立体标定结果计算夹持器到第二个相机的变换矩阵
从场景获取末端执行器到相机2的位姿,并进行opengl到opencv坐标系统转换
将所有标定数据保存到压缩文件中,以备后用
########### 为机器人对目标进行跟踪做准备
定义一系列位姿变换,用于测试不同的目标位姿
定于存储所有生成的变换矩阵列表
根据上述定义的范围生成一系列变换矩阵
向棋盘格中心的位姿变换
向后(z负向)的位姿变换
棋盘格基座的获取
获取并输出棋盘格的原始位姿
将机器人末端执行器和棋盘格复位到原始位姿
将棋盘格复位到原始位姿
########### 在相机1视角下,机器人对目标进行跟踪
初始化变换矩阵和图像列表,用于存储相机1当前位姿、下一位姿和各位姿对应的图像:存储当前机器人末端执行器的位姿、存储计算得到的下一步的机器人末端执行器位姿、存储相机1拍摄的图像列表
遍历所有预先定义的位姿变换矩阵【实现了在相机1视角下对棋盘格位姿跟踪和视觉处理的自动化实验,为机器人视觉系统的测试和校准提供了重要的数据支持】:{ 计算目标物体(棋盘格)的新位姿,移动棋盘格到新位姿、如果移动失败,则跳过此次循环,获取相机1图像并转换为灰度图像,寻找棋盘格角点,打印旋转和平移误差。精细化角点位置,使用solvePnP求解物体位姿,计算棋盘基座到相机的变换矩阵,应用向目标中心的位姿变换得到棋盘中心到相机的变换矩阵,可视化并显示旋转轴。获取机器人末端执行器当前位姿,计算新的末端执行器位姿,以便于下一次移动,添加当前末端执行器位姿到列表,添加计算得到的下一步位姿到列表,添加图像到列表,移动机器人末端执行器到新的位姿,拍摄并显示移动后的图像}
将机器人末端执行器和棋盘格复位到原始位姿
########### 在相机2视角下,机器人对目标进行跟踪
初始化变换矩阵和图像列表,用于存储相机2当前位姿、下一位姿和各位姿对应的图像:存储当前机器人末端执行器的位姿、存储计算得到的下一步的机器人末端执行器位姿、存储相机2拍摄的图像列表
遍历所有预先定义的位姿变换矩阵【实现了在相机2视角下对机器人位姿跟踪和视觉处理的自动化实验,为机器人视觉系统的测试和校准提供了重要的数据支持】:{计算目标物体(棋盘格)的新位姿、移动棋盘格到新位姿、如果移动失败,则跳过此次循环、获取相机2的图像、转换为灰度图像、寻找棋盘格角点、打印旋转和平移误差、精细化角点位置、使用solvePnP求解物体位姿、计算物体到相机的变换矩阵、应用向目标中心的位姿变换、可视化并显示旋转轴、获取机器人末端执行器当前位姿、计算新的末端执行器位姿,以便于下一次移动、添加当前末端执行器位姿到列表、添加计算得到的下一步位姿到列表、添加图像到列表、移动机器人末端执行器到新的位姿、拍摄并显示移动后的图像}
将收集的位姿和图像数据存储为压缩文件,方便后续使用
将机器人末端执行器和棋盘格复位到原始位姿
########### 在相机2视角下,机器人对目标进行交互式跟踪模拟
交互式跟踪模拟:{从相机2获取BGR图像、将图像转换为灰度图、
检测棋盘格角点、如果没有找到角点,继续下一次循环、通过子像素角点检测精细化角点位置、使用solvePnP算法求解物体位姿、如果solvePnP求解失败,继续下一次循环、初始化物体到相机的变换矩阵、根据旋转向量更新旋转矩阵、更新平移向量、应用向目标中心的位姿变换、获取当前机器人末端执行器的位姿、根据得到的相机位姿计算新的机器人末端执行器位姿、将机器人末端执行器移动到新的位姿}
作者陈晓永:智能装备专业高级工程师,软件工程师。机器人自动化产线仿真动画制作
The End