一、弱磁控制
常用的FW即弱磁控制方法一般为:电压外环控制、单个电流环控制、直接输出电压幅值分配控制、输出电压角度PI控制、不弱磁控制、直接解析解、查表、速度反比例曲线拟合等等。
弱磁控制相关因素:过调制(母线电压的剧烈波动)、电流环控制、前馈解耦、饱和、根据电磁转矩脉动权衡最大输出电压裕量、电压和电流极限圆。
在下图的最中间是电压极限圆和电流极限圆图示,坐标系为id-iq,当前也可以使用磁链或者电压坐标系,但是电流坐标系最为直观,因此坐标系为id-iq。常规将弱磁一区称为FW,弱磁二区称为MTPV(最大转矩电压比)。
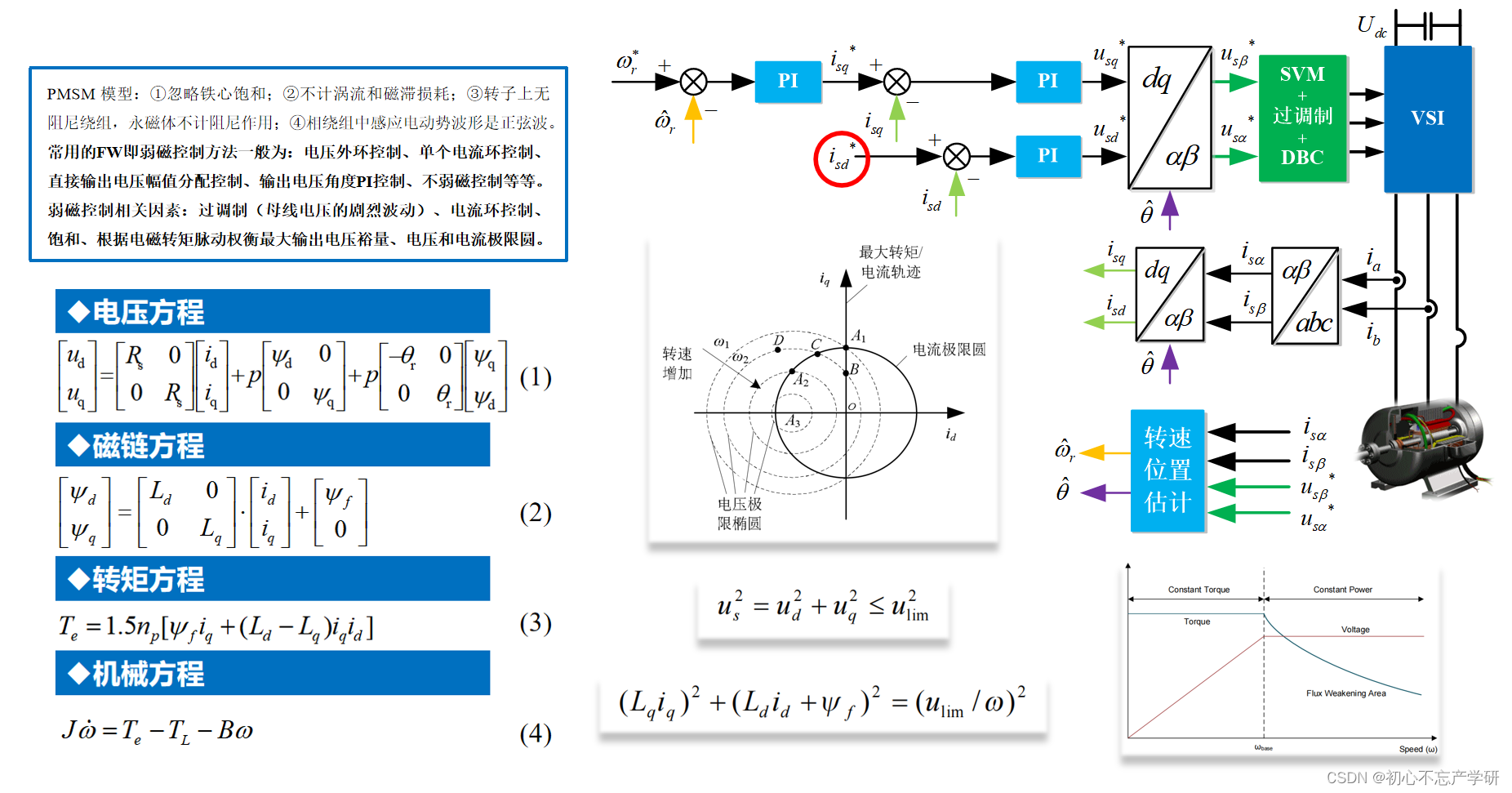
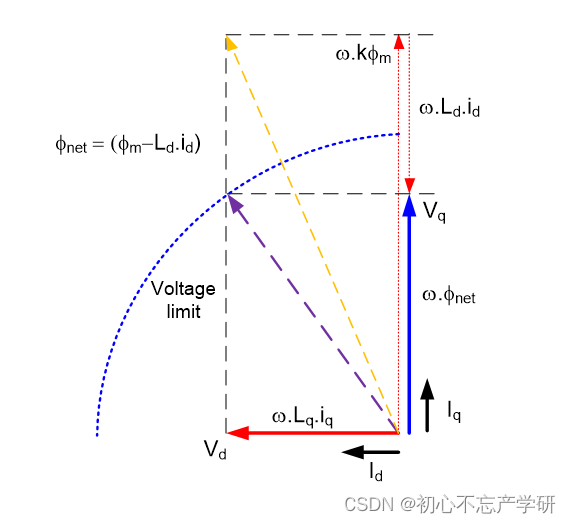
由下图可知,可以通过在定子侧注入特定方向的直轴电流来生成可以削弱转子磁场的气隙磁场来实现弱磁升速控制。而直轴电流参考值通常采用直接计算法或电压外环法来得到。
直接计算法
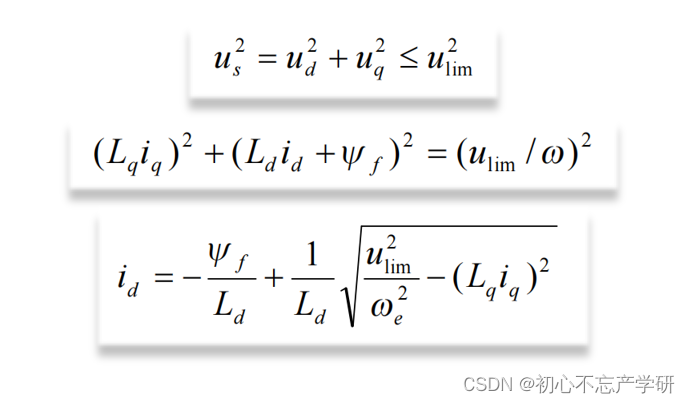
交轴电流参考值由速度环生成来平衡负载转矩,则弱磁一区和弱磁二区均可以根据电压方程来直接求解出直轴电流参考值。
电压外环法
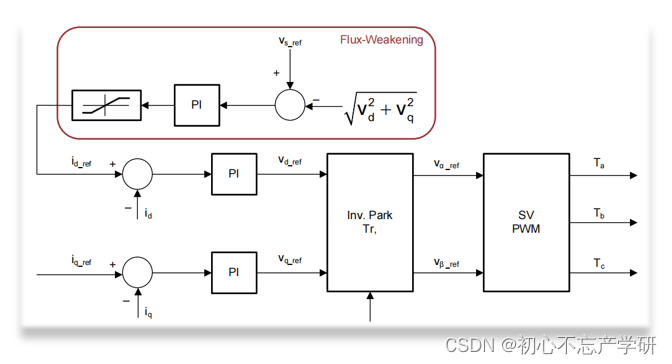
电压外环发常见的注意事项如下:
(1)电压外环法的弱磁增益选取,弱磁增益可根据弱磁控制小信号模型进行自适应计算;
(2)进出弱磁区判断条件,防止低速、重载、急加速等工况条件下误入弱磁控制区域;
(3)弱磁控制PI给定电压的裕量,保留一定的电压裕量有利于权衡弱磁控制的动稳态性能;
(4)弱磁控制PI限幅选取,该限幅受到电流极限圆、MTPA和MTPV的多重限制;
(5)电流环(电流控制环路带宽可以弱一些)的前馈解耦有利于弱磁区域的快速进入和快速退出。 电流环不能做到近似的无限带宽,就一定会出现积分饱和现象,前馈解耦有利于在转速突变或负载突变时在一定程度上来削弱积分饱和现象。
其他注意事情以及电压外环的各种形式待后续继续更新......
其他弱磁法
单个电流环控制:由于弱磁区电压幅值固定,此时可通过仅利用一个环路来对弱磁区的直轴电压和交轴电压进行重新分配,具体方案可参考北京交通大学相关博士论文,其相关研究较多。
直接输出电压幅值分配控制:在弱磁区直接根据电压方程重新分配直轴电压和交轴电压,或者将交轴电流环输出直轴电压,将直轴电流环输出交轴电压等,以重新分配交直轴电流环的积分项。无需直轴电流给定值。
输出电压角度PI控制:类似单个电流环控制方案,交轴电流环输出电压角度,直轴电流环输出电压幅值(保持幅值一直处于饱和状态附近)。无需直轴电流给定值。
查表:离线标定,可对所有工况进行标定(全速、全载、全温度范围内等)。
速度反比例曲线拟合:类似将查表法进行了解析解的曲线拟合。
二、弱磁区域
何为弱磁区域
当电流极限圆面积较大时,随着电机转速的增加,控制策略依次为MTPA、FW、MTPV,简单来说在MTPA和MTPV之间的区域即为弱磁区域。
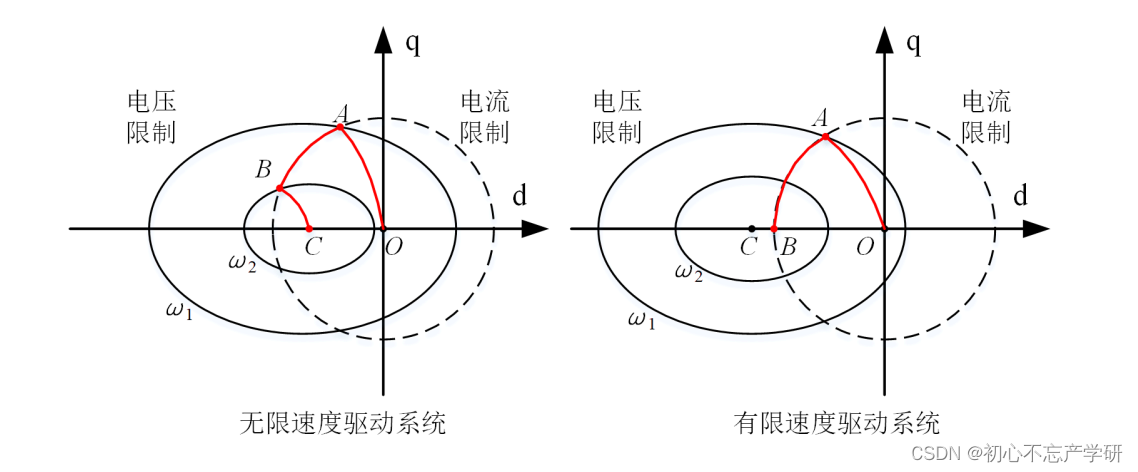
依据电流极限圆是否包含最小的电压极限圆,可将同步电机控制系统分为无限速度驱动系统(电流极限圆包含了最小的电压极限圆)和有限速度驱动系统(不包含)。
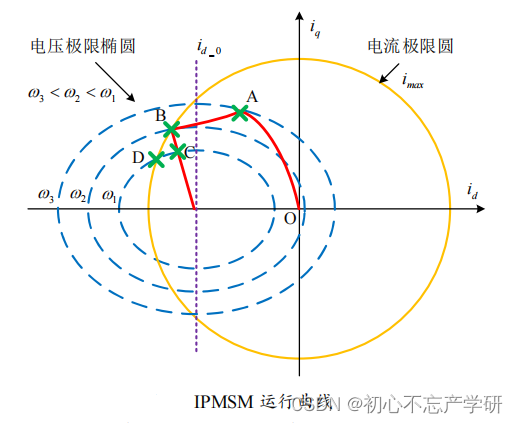
借用上图,其中OA(MTPA)、AB(FW)、BC(MPTV)、BD(电流圆)。
AB也为恒转矩曲线;BC(MPTV)曲线仅考虑电压约束,为恒转矩曲线与电压极限椭圆的切点;BD(电流圆边界)曲线为同时考虑电压约束和电流约束下的最大转矩输出。
此处需要注意MTPA、MC即电流圆、MTPV均为线,而FW为区域,所以本质上 这三条线 一般用 直接的解析解 + 电机参数查表 来得到,FW区域通过控制器(本质为在一定区域内搜索,直接受到所需转矩 和 电压极限圆的影响,间接受到电流极限圆、MTPA以及MTPV这三条线的限制)得到。
当前也有一些方案对这四者都进行 直接地改进版的快速解析,或者 对这四者都进行 改进版的快速搜索 或者 控制。以电压外环为例,A点到B点的图示为最理想的电流矢量的迁移路径(恒转矩),然而受到定子电阻、定子电感变化等电机参数、输出电压持续饱和等因素的影响时,弱磁路径会发生变化,其实际电流矢量的路径为该A点到B点所示电流矢量的理想迁移路径附近偏移,进而直接影响弱磁控制的动稳态性能。
调制策略影响
不同的调制策略会影响电压矢量的最大空间范围
由于受到死区时间和最小窄脉冲(可选)的限制(图中最小时间限制为 死区时间 + 窄脉冲(可选)),七段式SVPWM的实际电压空间范围小于五段式SVPWM的实际电压空间范围,所以通常低调制区采用七段式SVPWM,高调制采用五段式SVPWM。另外还有三段式SVPWM即电压空间矢量六边形的线边缘,一段式SVPWM即电压空间矢量六边形的角边缘(6个点,即为方波模式)。七段式和五段式切换较为常用,而从五段式切换到三段式和一段式时,需要合适的过渡手段来保证较低的电流谐波和转矩脉动以及兼顾系统的动态性能。
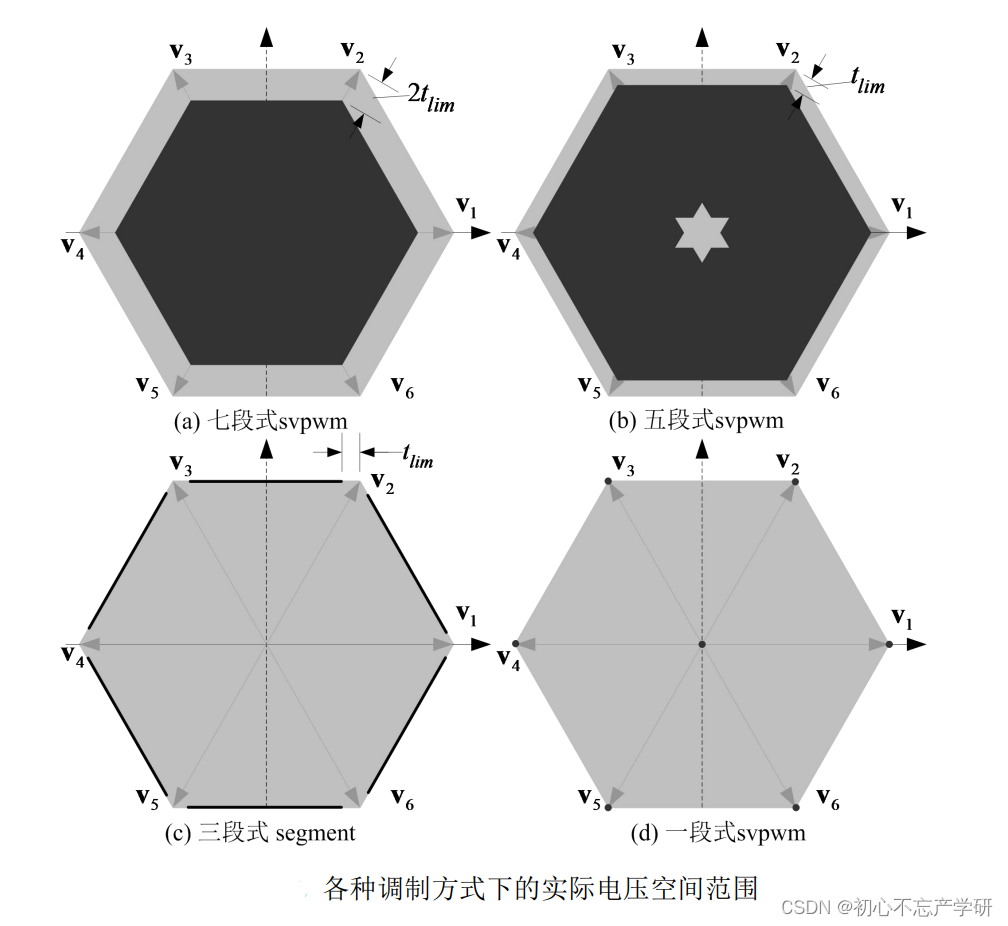
此图片来源于网络
附录:MTPV
MTPV (Maximum Torque Per Volt): MTPV 控制策略则关注在给定电压条件下实现电机的最大转矩输出。它适用于电机高速运行场景,尤其是在电机电压接近供电电源电压极限时,通过调整电流矢量和弱磁控制,使电机在电压极限边界上工作,从而在不超出电压限制的前提下最大化转矩输出。MTPV 控制特别适用于电动汽车等应用中,当电机运行在高速区、电池电压接近上限时,为了保持或提高车辆的加速性能,需要电机能在有限的电压下提供尽可能大的转矩。
常规MTPA仅是一条线(若参数摄动范围较小,则其是一条固定的电流矢量的迁移路径),因此此处可以将FW区域也理解为是一种MTPA,如果可以保证FW区域内电流矢量的迁移路径贴近理想路径(恒转矩),则可以认为此路径也是一种广义的MTPA路径。
MTPA与MTPV的关系: MTPA 和 MTPV 本质上都是通过优化电机的电流和磁通分布来提高电机运行效率和性能,但它们的关注点和适用场景有所不同:
-
目标差异:MTPA 直接关注电流消耗,旨在在特定转矩需求下最小化电流,以降低铜耗;而 MTPV 关注的是在给定电压限制下最大化转矩输出,适用于电压受限条件下的性能优化。
-
应用范围:MTPA 主要适用于电机低速或中速运行区域,尤其在启动和爬坡等需要大转矩输出的工况下,通过降低电流消耗来提高能效;而 MTPV 更加适用于电机高速运行区域,特别是在电机电压接近电源电压极限时,通过调整控制策略以充分利用有限的电压资源,提供尽可能大的转矩。
-
控制策略的互补性:在实际应用中,MTPA 和 MTPV 控制策略往往是互补的。电机控制系统可能会根据电机运行速度、负载需求以及电源电压条件动态切换或融合这两种控制策略。在低速或中速区间,优先采用 MTPA 控制以最小化电流消耗;当电机进入高速区且电源电压接近极限时,则切换至 MTPV 控制,以在电压约束下最大化转矩输出。
总结来说,MTPA 和 MTPV 分别是从电流消耗最小化和电压利用率最大化的角度来优化永磁同步电机的运行性能,它们在电机控制策略中扮演着不同的角色,适用于电机运行的不同工况和需求。在实际应用中,这两种策略往往结合使用,以实现电机在整个运行范围内的高效、灵活控制。