【QT】ROS2 Humble联合使用QT教程
文章目录
- 【QT】ROS2 Humble联合使用QT教程
- 1. 安装ROSProjectManager插件
- 2. 创建ROS项目
- 3.一个快速体验的demo
- Reference
环境的具体信息如下:
- ubunt 22.04
- ros2 humble
- Qt Creator 13.0.0
- ROS ProjectManager 13.0.0
本文建立在已经安装好Qt Creator的基础上,如果还没有安装Qt Creator请参考这篇(【QT】Ubuntu22.04 配置 QT6.5 LTS)
1. 安装ROSProjectManager插件
安装ROSProjectManager的主要流程参考官方给出的流程,官方地址在这里(ros_qtc_plugin),我们采用二进制安装更为方便。首先先安装相关的依赖
sudo apt install libarchive-tools
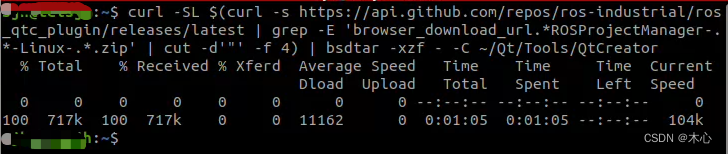
然后安装插件,注意这里是默认Qt Creator的安装路径为~/Qt/Tools/QtCreator,如果你的路径不是这里,请将下面语句-C后改为你自己的安装路径。
curl -SL $(curl -s https://api.github.com/repos/ros-industrial/ros_qtc_plugin/releases/latest | grep -E 'browser_download_url.*ROSProjectManager-.*-Linux-.*.zip' | cut -d'"' -f 4) | bsdtar -xzf - -C ~/Qt/Tools/QtCreator
等待一会,像这样就代表安装完成了
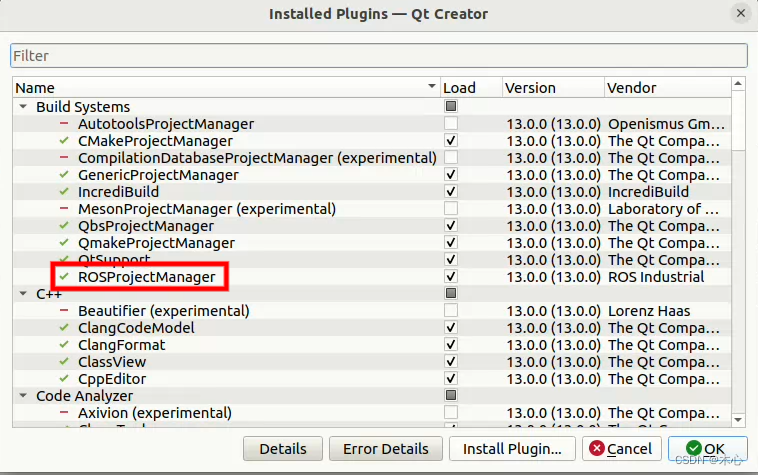
然后我们重启Qt Creator,按照下列方式查看我们的插件
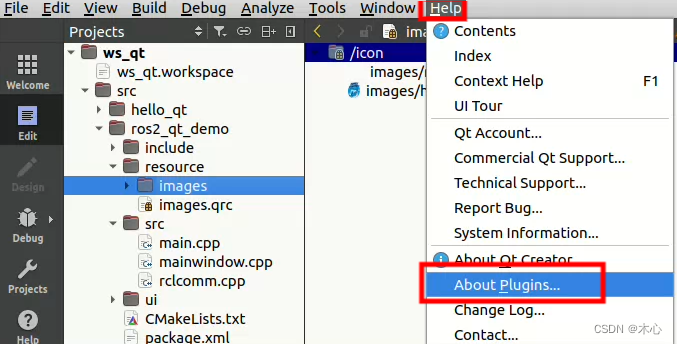
出现ROSProjectManager就代表安装成功了
2. 创建ROS项目
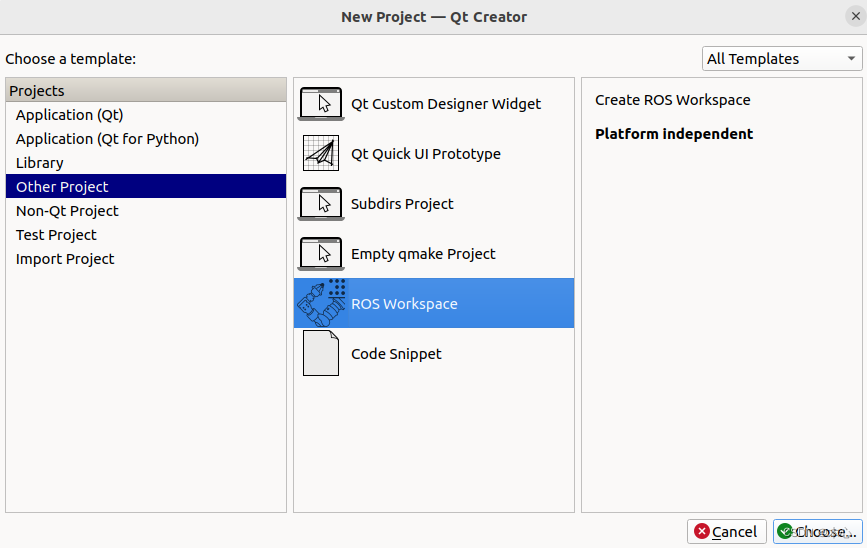
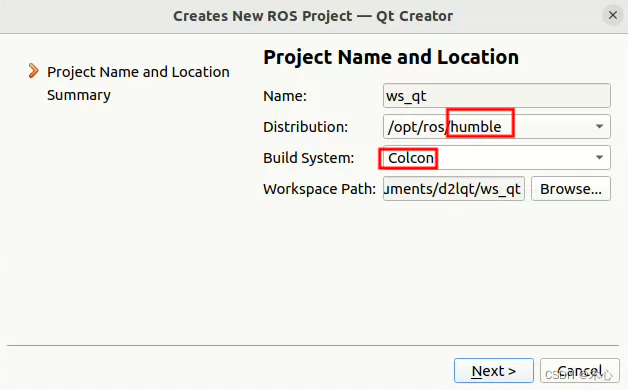
首先File -> New Project,进入项目配置界面,然后选择ROS Workspace
然后配置信息,使用ROS2,则build选项一定要选Colcon
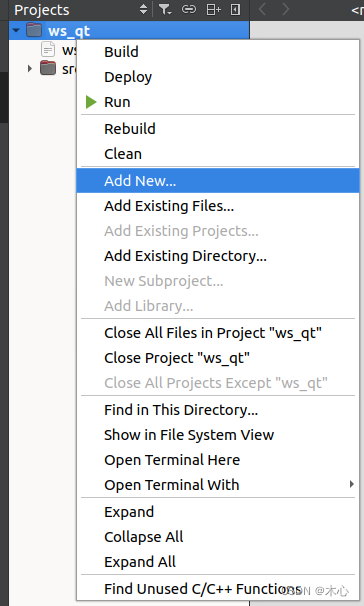
然后我们右键,选择Add New
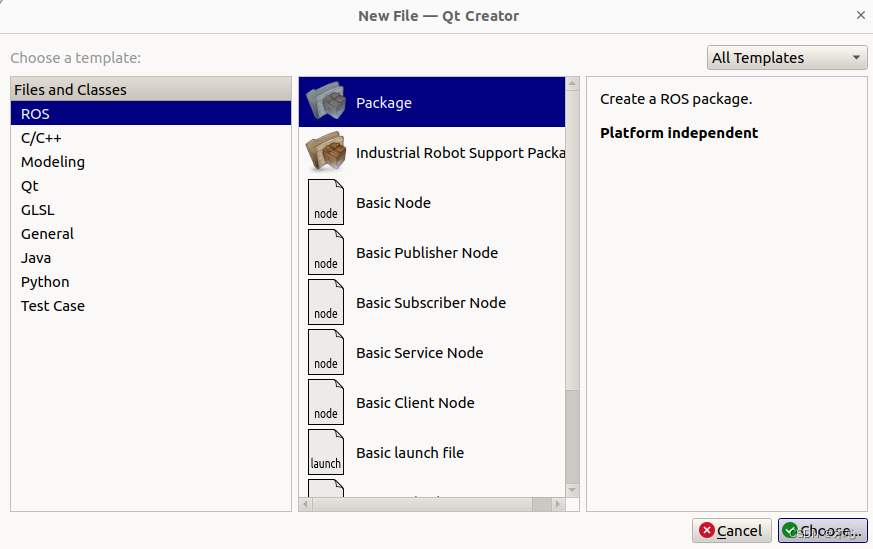
选择添加ROS功能包
功能包的名字可以随便取
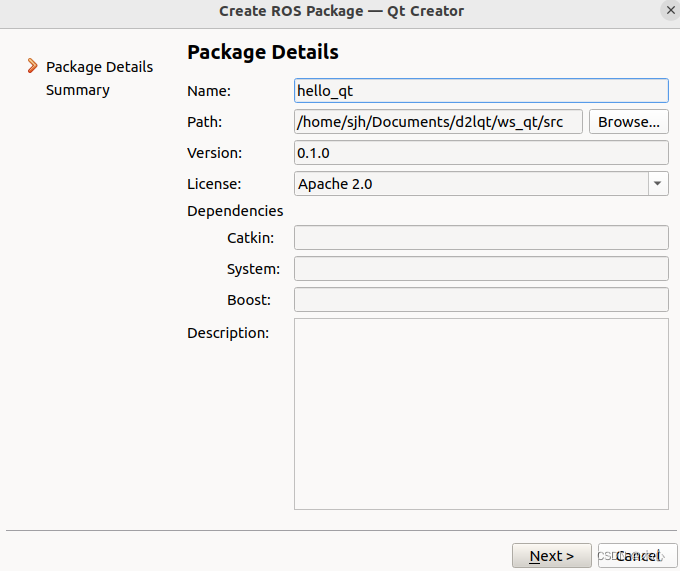
然后点击Next,如果点击Next没有反应的话,我们先点击Browse,然后立马cancel,这个路径不要改,退出来之后,我们就可以点击Next了,这可能是一个小bug。然后就顺利创建了功能包
3.一个快速体验的demo
直接进入src文件夹中然后git clone这个ROS功能包,地址:https://github.com/shenmuxin/ros2_humble_qt_demo
git clone https://github.com/shenmuxin/ros2_humble_qt_demo.git
然后编译运行即可
colcon build
source install/setup.bash
ros2 run ros2_humble_qt_demo ros2_humble_qt_demo
效果如下:
Reference
[1]QT在线配置安装ROS2插件以及创建项目
[2]ROS2-QT合并编程(从环境搭建到UI界面编写,很详细)
[3]【基于 QT5 的 ROS2 GUI 开发教程(一)】话题消息的发布和订阅