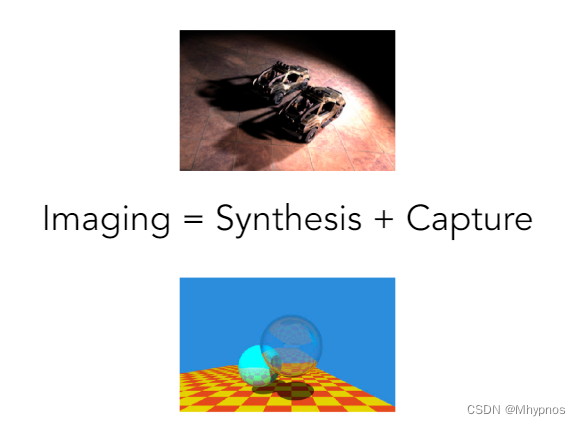
成像:光栅化成像(上图)和光线追踪成像(下图)
都是用合成的方法来成像。还可以用捕捉的方法来成像
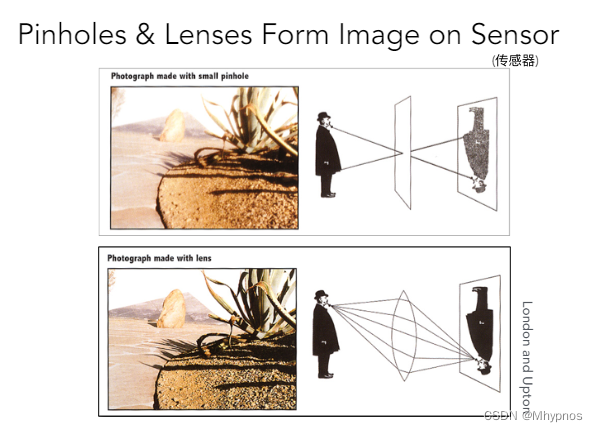
利用小孔成像原理制作的相机就是针孔相机
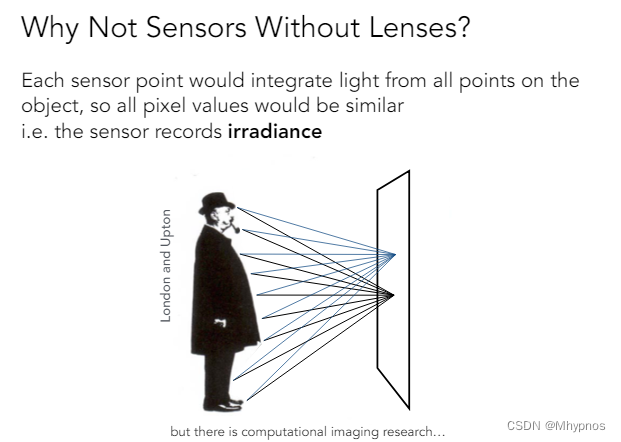
如果一个相机没有针孔/透镜,是无法拍照的。
因为任何一个点都有可能收集到来自不同方向上的光。这个点本身作为传感器是不区分来自各个方向上的radiance。则各个方向上能量都被收集到一起,该点收集到的是irradiance,而不是radiance。最终所有东西都是糊的。
传感器现在记录不了radiance,只能记录irradiance
Pinhole Image Formation
针孔相机拍出的东西是没有深度可言的。也就是任何地方都是锐利清楚的,都不会是虚化的。
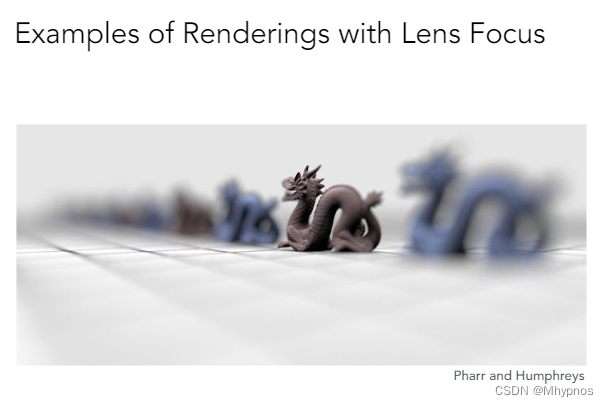
做光线追踪时用的就是针孔摄像机的模型。所以也得不到景深的模糊效果。如果可以模拟光线和透镜的作用,那么也可以作出景深的渲染效果
Field of View (FOV)/视场
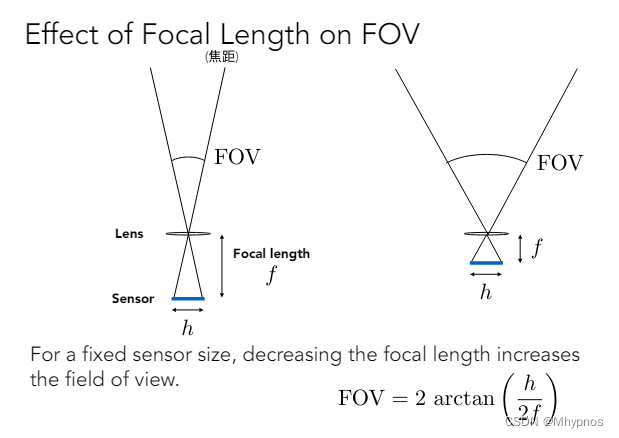
视场:能看到多大的范围
定义:我们认为传感器会感受到所有的光线
传感器高度定义为h
传感器和小孔间的距离(焦距)为f

通常认为是以35mm的胶片为基准,即传感器高度固定。通过控制焦距的大小,来控制视场大小
手机上所谓的28mm焦距只是等效35mm的传感器。实际上手机的传感器更小,因此焦距也更小
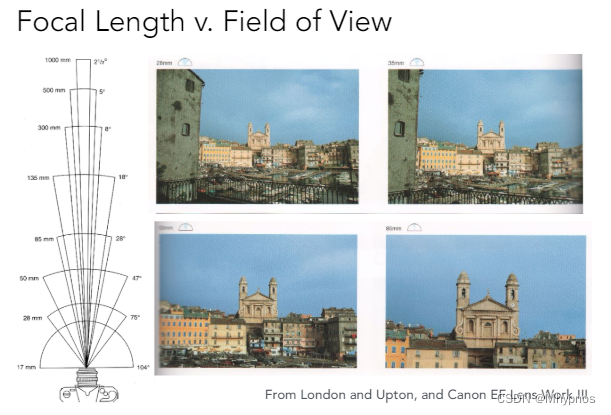
不同fov效果
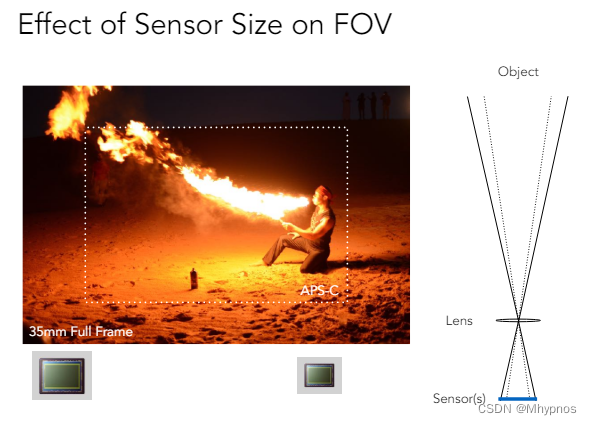
减少传感器大小,fov减小。
平常认为传感器和胶片是一回事。但对于渲染来说,传感器负责记录每个像素收到的irradiance多大,
最后的film决定存成什么样的格式。两个概念可以不一样,只是目前混淆着使用
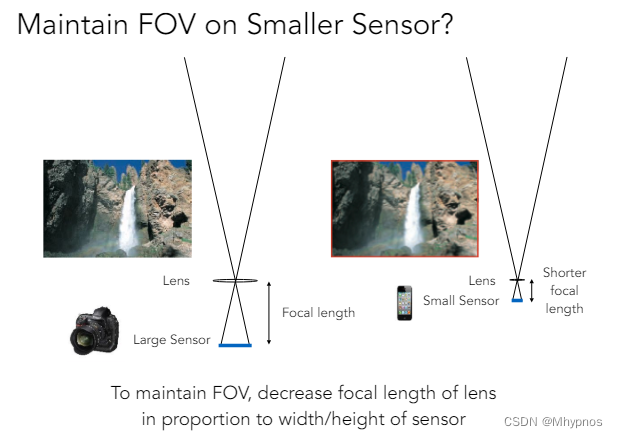
对于手机来说,焦距较小,使用较小的传感器达到相同的fov
Exposure/曝光
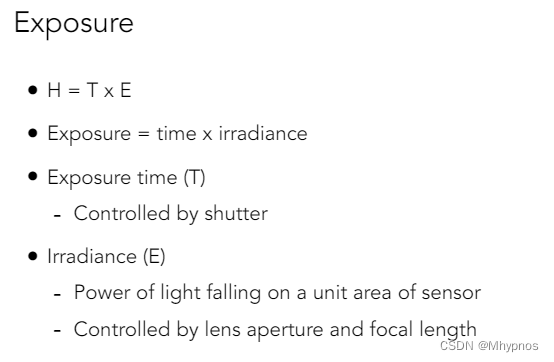
Exposure是irradiance乘time
记录的不是单位时间的而是总共的能量。
时间体现在相机里就是快门可以控制多长时间光可以进来
irradiance决定的其中一点是光圈的大小,光圈会影响到镜头接收到多少光
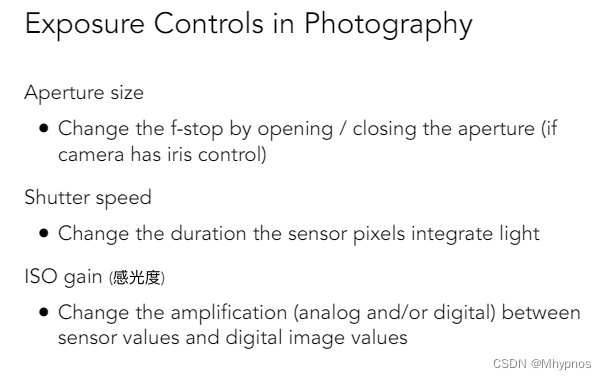
相机影响最后照片的因素:光圈大小(f-stop),快门开放时间,感光度(ISO是一个后期处理,当感光元件已经感知到某一层级的光,例如0.1,如果觉得暗,则把0.1乘以一定值。可以发生在硬件上,如传感都本身调节灵敏度,也可以在照片的数字信号上去调节)
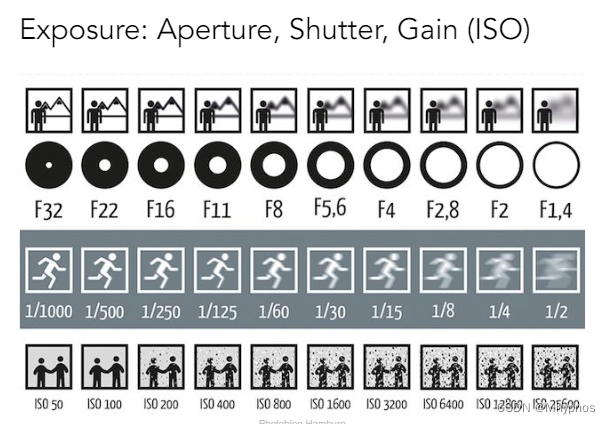
不同因素的参数对应的效果
任何一个信号会有一个噪声,放大信号的同时,同样会放大噪声
iso是线性的
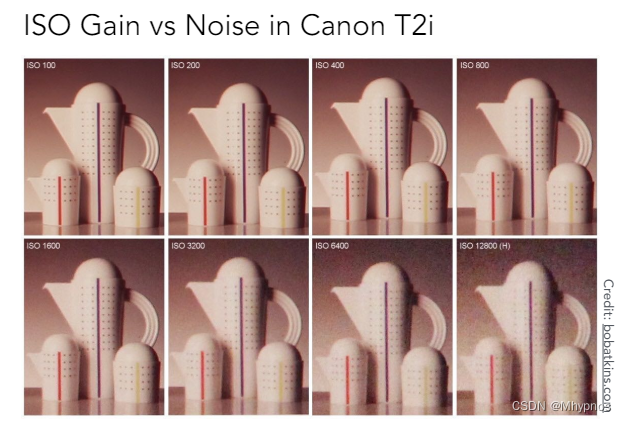
iso能够提示曝光度,但会造成噪声放大
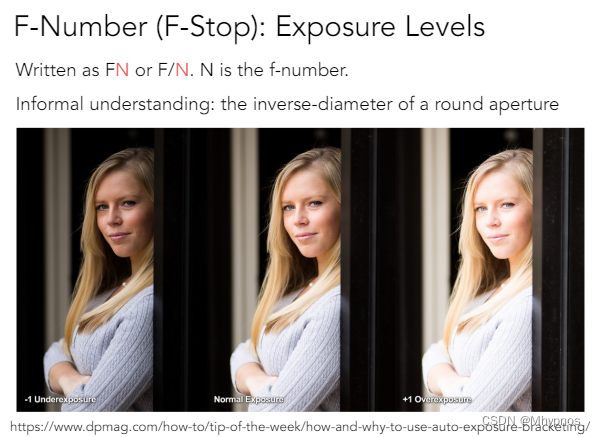
f数非正式理解为光圈直径的逆,即1/直径
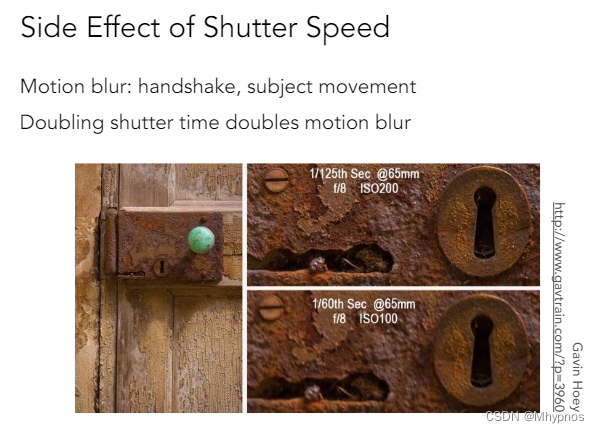
快门曝光时间可以起到调节曝光度的作用。
高速运动的物体容易出现运动模糊,即快门打开的这段时间内,物体发生了移动。传感器起到的是平均的作用,因此模糊
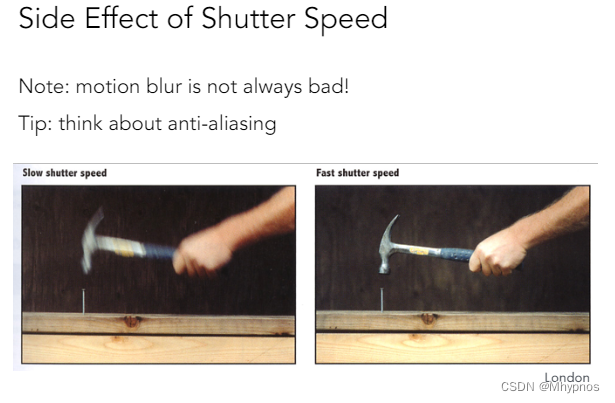
更短的快门时间,运动模糊会减低,但曝光度也减低
而且运动模糊不一定是坏事,如果没有运动模糊会觉得速度很慢。运动模糊在时间上采样是一种反走样的效果
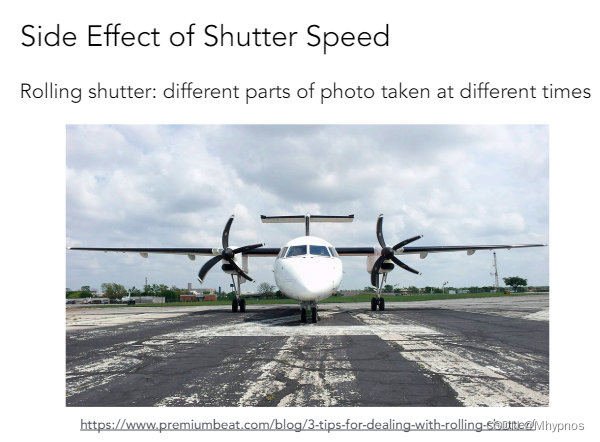
机械快门打开存在一定时间,如果物体运动速度快于快门打开时间,会出现Rolling shutter的问题,对高斯运动的物体,如螺旋架造成扭曲。
因为图像上不同的位置有可能记录的是不同的时间进来的光
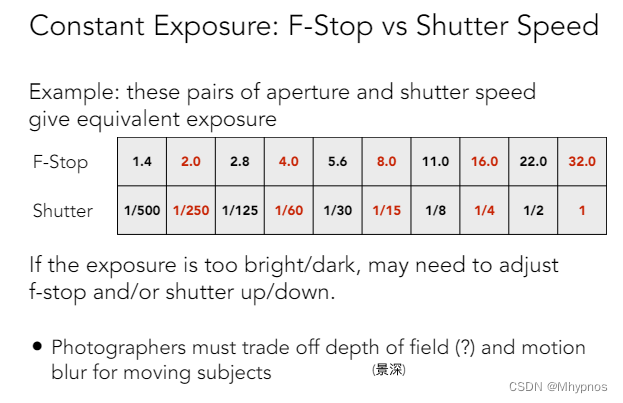
f-stop是1/直径,考虑多少曝光是面积
Fast and Slow Photography
快门的应用
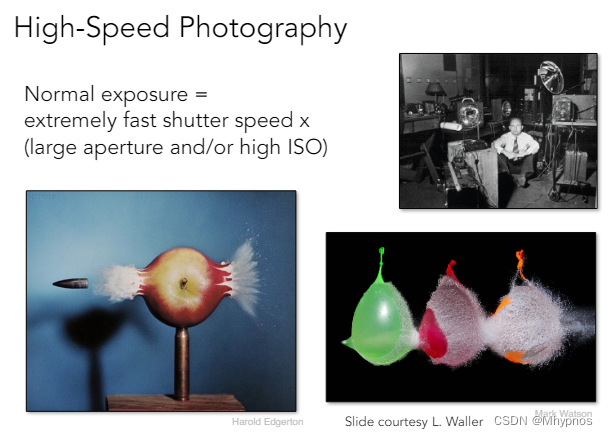
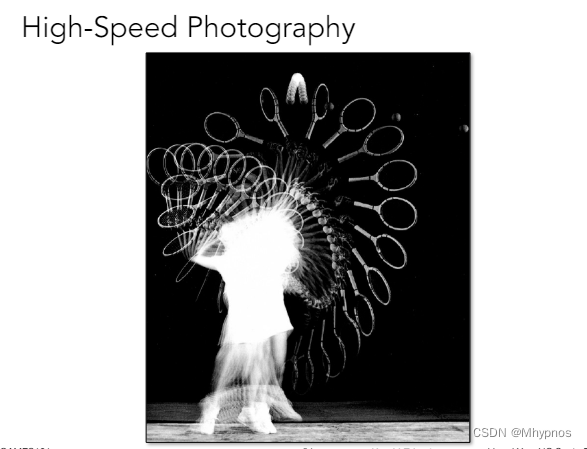
高速摄影:每秒拍更多的帧数,然后按正常的帧数来放。意味着每张照片的快门时间非常少,及更大的光圈
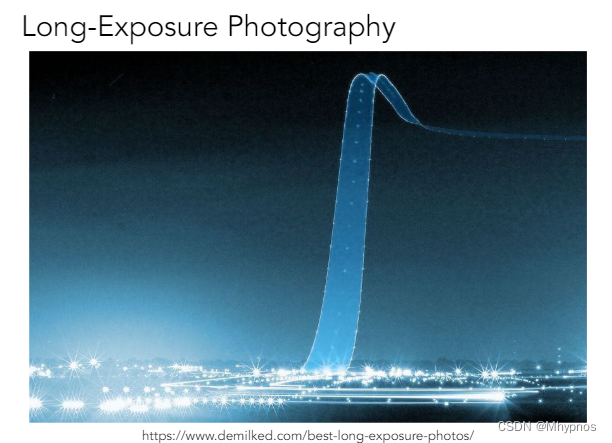
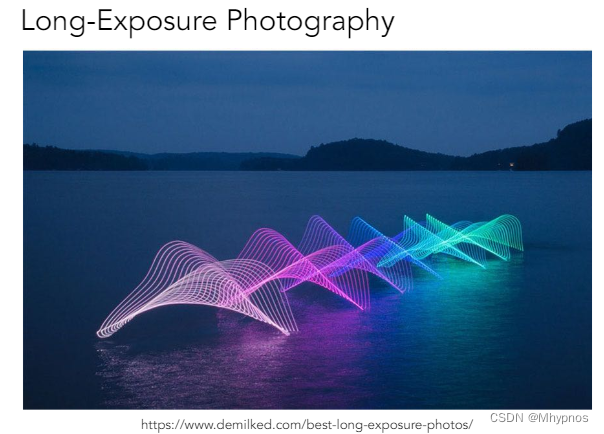
延时摄影:超低速。非常长的曝光时间,及非常小的光圈。这些拉丝的效果其实就是运动模糊
Thin Lens Approximation
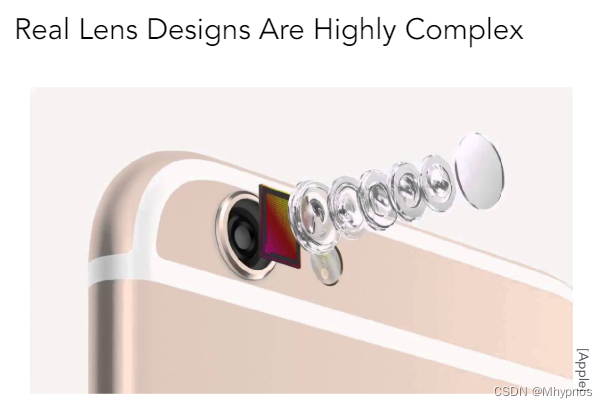
真正的镜头非常的复杂,不会用单个透镜做成像,而是用透镜组
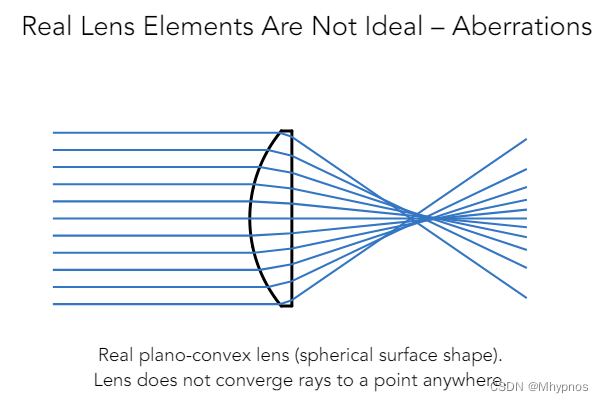
aberrations:一面凸一面直的透镜不可能把光聚集到一点。(平行光进入到透镜本来是会被聚集到一点)
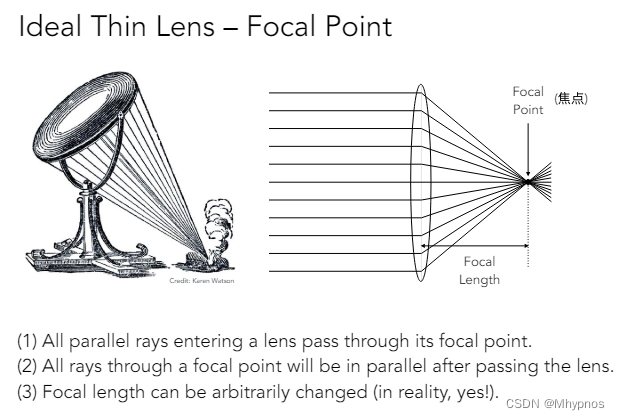
我们研究的是理想化的透镜,不考虑厚度。对于平行于透镜的光会被聚集到一个点,即焦点。焦点到透镜中间的距离为焦距
光路有可逆性,所以如果光路穿过焦点,射到透镜会被折射成一束平行光
认为薄的透镜可以任意改变焦距
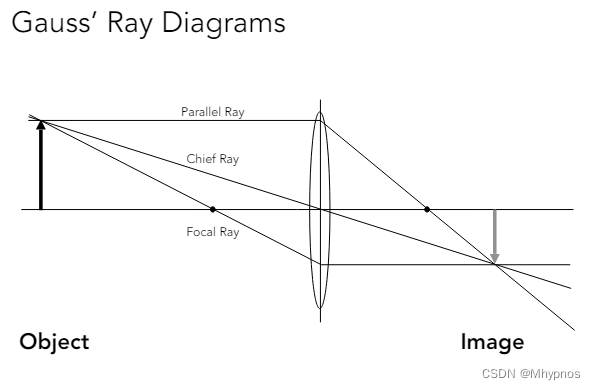
任何一个光只要过透镜中心就不会改变方向
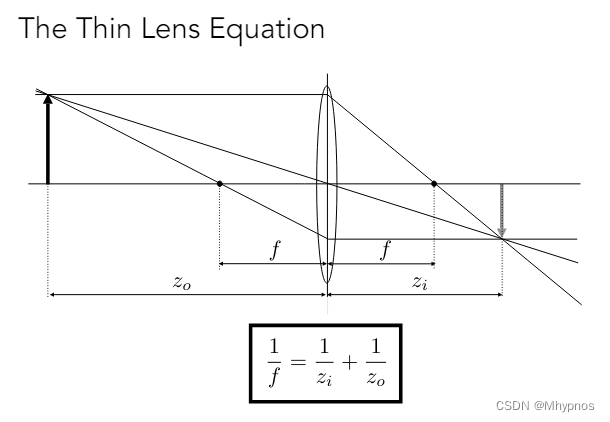
物距: z o z_o zo
相距: z i z_i zi
对于固定焦距的透镜来说,如果要改变物距,则相距也要改
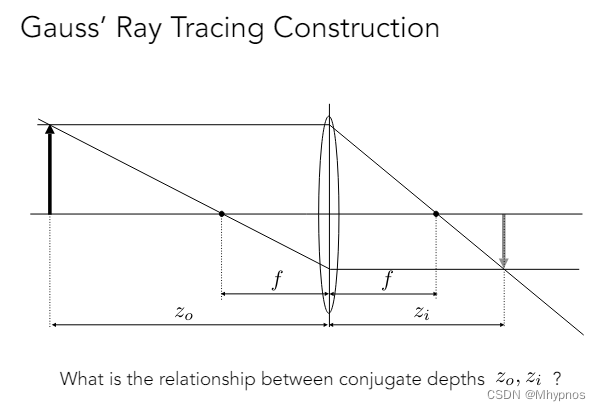
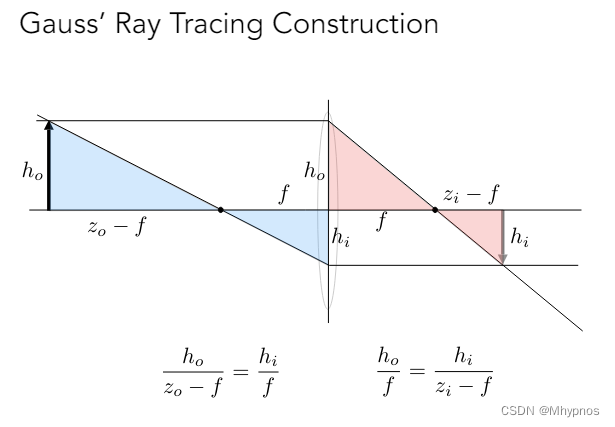
图中的是两组相似三角形
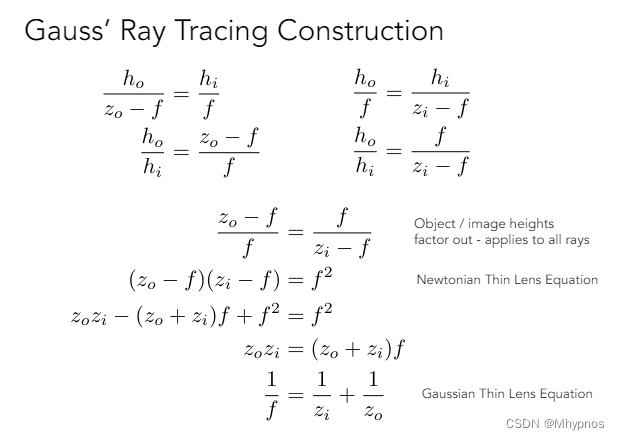
薄透镜公式:反映了焦距,物距,相距的关系
Defocus Blur
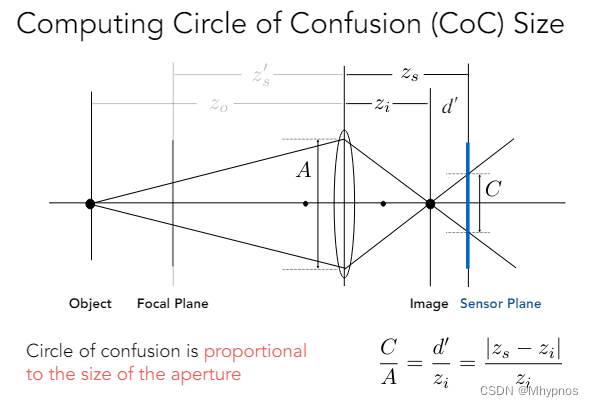
远处一个平面focal plane,平面上的光经过透镜后会被聚焦到成像平面上,如果物体不在focal plane,会模糊。如上图,object聚焦在成像平面前方image,在继续传播。一个点被感光平面接收到之后,不再是一个点,而是一个圆。这个圆就是Circle of Confusion
看某个距离物体的模糊程度,和光圈的大小成正比

大光圈更模糊
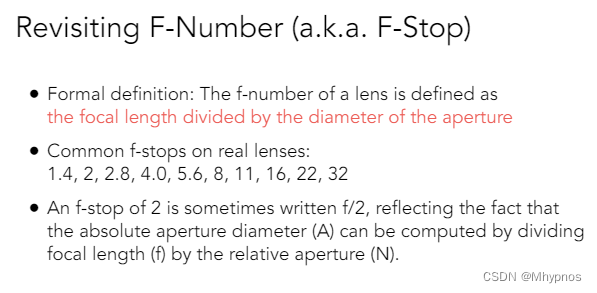
直径分之1的定义其实是不对的,应该是焦距N除以光圈的直径D

把f数光圈实际大小和焦距联系在一块
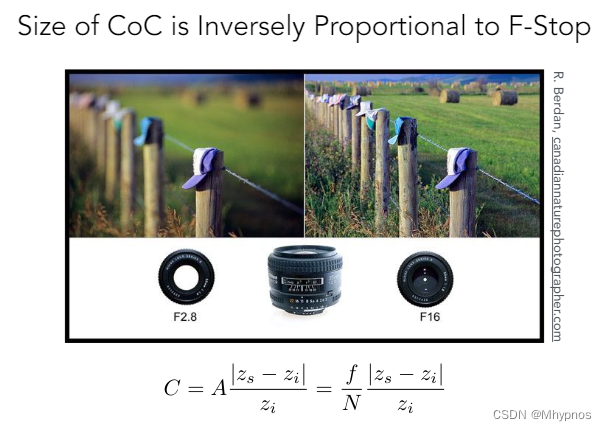
A就是光圈的直径,C和N有反比关系
为了更清楚的照片,需要小光圈
Ray Tracing Ideal Thin Lenses
模拟薄透镜做光线追踪
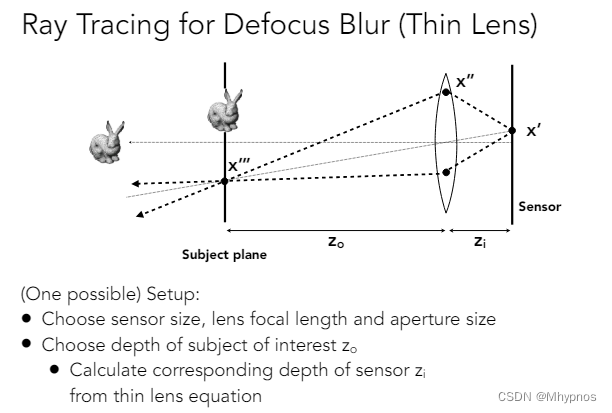
确定成像平面sensor有一定大小,定义透镜属性焦距和光圈大小,定义透镜离场景中某个平面有多远 z o z_o zo,认为这个平面是要进行着重拍摄的。以此可以推出相距是 Z i Z_i Zi
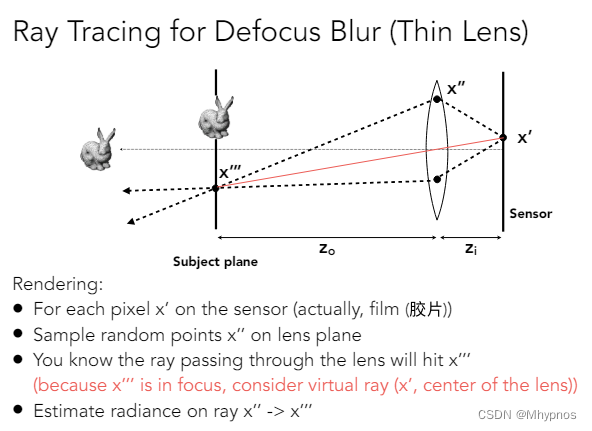
第一步,在成像平面上选一点 x ‘ x^` x‘
第二步,在透镜上随机选一点 x ‘ ‘ x^{``} x‘‘
第三步,连线两点,可以求得打到的位置 x ‘ ‘ ‘ x^{```} x‘‘‘
第四步,计算 x ‘ ‘ x^{``} x‘‘到 x ‘ ‘ ‘ x^{```} x‘‘‘的radiance
即简单利用透镜公式算一下折射的光线方向
Depth of Field
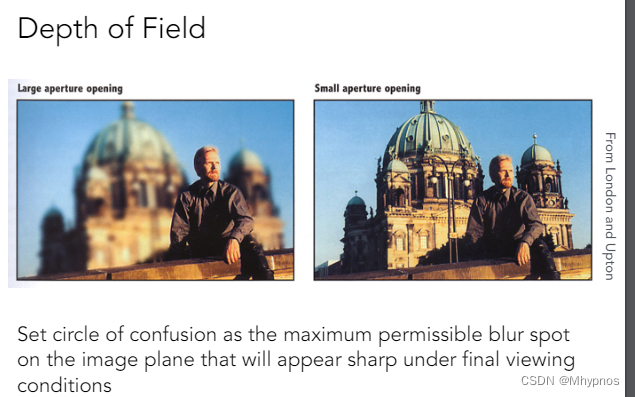
大光圈与小光圈会影响模糊的范围
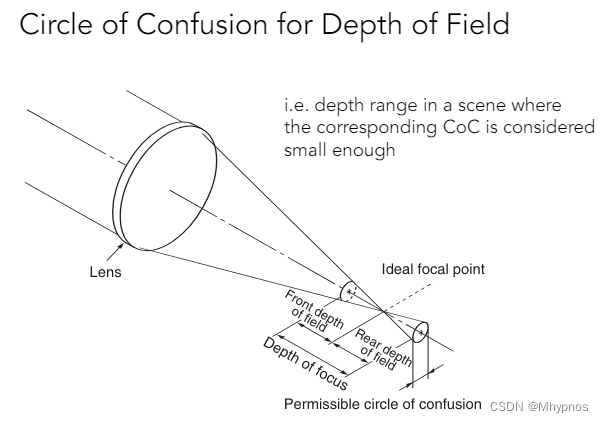
景深就是指在实际场景中有一段深度,这段深度经过透镜后会在成像平面的附近形成一段区域,这段区域内,认为COC足够小。
算景深就是算在COC很小的范围内,对应看到的清晰场景距离
只要当COC的大小比像素小或差不多,都认为得到的结果是锐利的
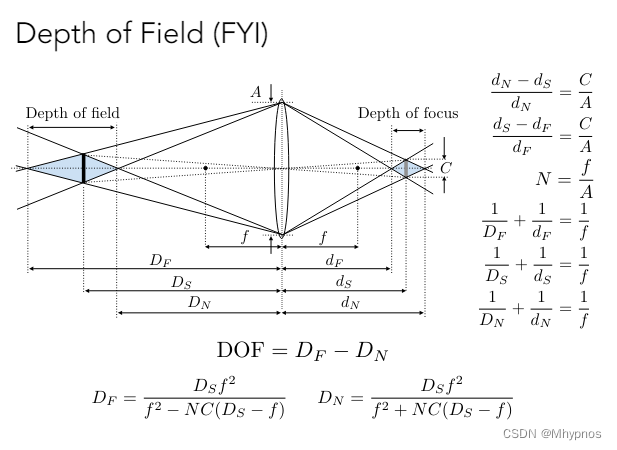
景深的范围 D F D_F DF和 D N D_N DN
光圈越小,景深范围越大,更接近小孔,更锐利