1. cloud studio
1.1 cloud studio介绍
Cloud Studio(云端 IDE)是基于浏览器的集成式开发环境,为开发者提供了一个稳定的云端工作站。支持CPU与GPU的访问。用户在使用 Cloud Studio 时无需安装,随时随地打开浏览器即可使用。Cloud Studio提供每月 10000 分钟时的免费额度,足够普通人使用,但在每次使用完后要记得将服务器关机,不然 10000 分钟也只够开机一周。
>>> cloud studio
1.2 注册与登录
进入Cloud Studio 后,首先需要注册一个腾讯云账号,直接微信扫码注册。

注册完成后,登录 Cloud Studio ,你会看到一个简洁的用户界面,提供了多种开发模板供选择。

1.3 创建 Ollama 模板
点击 内置AI代码助手 ,会出现模板界面,选择 Ollama ,选择免费版即可。


选择后等待系统创建,知道右侧出现启动按钮:

1.4 启动云
点击启动,启动创建好的云服务器。网页中会出现一个VScode的页面:

2. Ollama
2.1 Ollama简介
Ollama是一个开源的工具,专门用于管理和运行各种大模型。它支持多种模型格式,并且可以自动处理模型的依赖关系,使得模型的部署和运行变得非常简单。Ollama的官方网站提供了丰富的模型资源,用户可以根据自己的需求选择合适的模型进行下载和运行。
>>> Ollama

2.2 模型参数与选择
在Ollama的官网上,每个模型的下方都会标注模型的参数量,例如7B、13B、70B等。这里的“B”代表Billion(十亿),表示模型的参数量。参数量越大,模型的复杂度和能力通常也越强,但同时也会消耗更多的计算资源。

对于腾讯云Cloud Studio提供的免费GPU资源(16G显存、32G内存、8核CPU),我们可以选择7B或8B的模型进行部署。作者选择了14b的模型进行部署。
3. DeepSeek-R1 云端部署
3.1 DeepSeek-R1简介
DeepSeek-R1 是深度求索(DeepSeek)推出的一款高性能大模型,它在多项自然语言处理任务中表现出色,尤其是在文本生成、对话系统和知识问答等领域。DeepSeek-R1 的参数量从 1.5B 到 671B 不等,用户可以根据自己的硬件配置选择合适的模型进行部署。
3.2 下载与部署
因为 Cloud Studio 已经自动安装了 Ollama ,所以部署 DeepSeek-R1 非常简单。我们首先在网页VScode中调出终端:点击查看,点击终端

然后运行以下命令:(本文使用的是 14b 的模型,也可能使用 1.5b 、7b 和 8b )
ollama run deepseek-r1:14b然后等待安装:
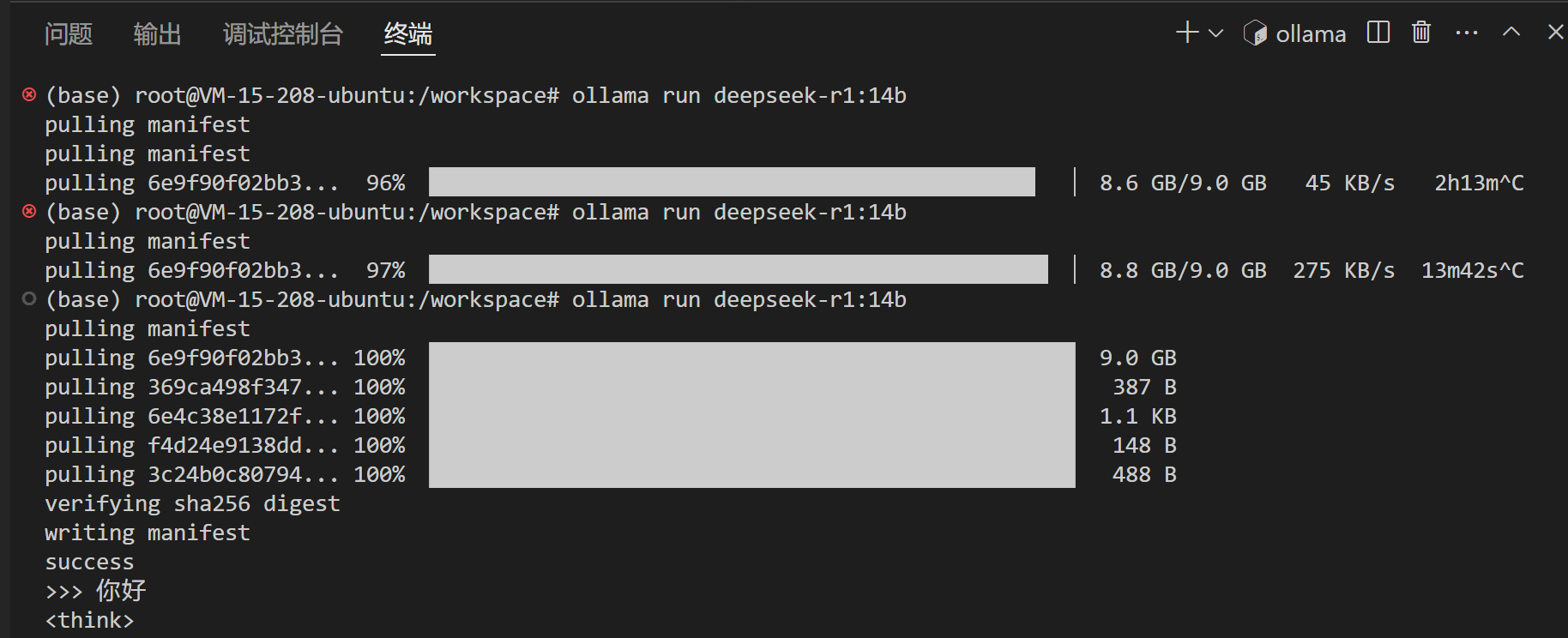
下载过程中如果出现严重掉速行为,可以先使用 Ctrl+C 退出下载,然后再次运行部署命令即可,之前下载的进度不会丢失。
等待下载结束,即可部署完成。

在部署即将完成时请不要翻墙,因为DeepSeek屏蔽了外国ip,翻墙会导致部署失败。
3.3 退出DeepSeek
在对话框中使用 /bye 退出DeepSeek:
/bye



