2024-05-16,由中科院、北京邮电大学和香港城市大学联合创建了UAV-VisLoc数据集,这个数据集通过收集中国11个不同地点的无人机图像和卫星地图,为无人机在失去全球导航卫星系统(GNSS)信号时提供精确的经纬度坐标定位,具有重要的实际应用意义。
数据集地址:UAV-VisLoc - 用于无人机视觉定位的大规模数据集|无人机数据集|视觉定位数据集
一、研究背景:
无人机(UAV)的应用范围日益扩大,包括农业发展、环境监测和地面监视等。在这些应用中,获取无人机的精确位置(即准确的纬度和经度坐标)对于下游任务至关重要,尤其是在全球导航卫星系统(GNSS)中断或不可用的情况下。随着遥感技术的发展,我们可以获得几乎覆盖地球每个角落的高分辨率卫星地图,每个像素都标注有精确的坐标。因此,通过将无人机拍摄的地面图像与相应的正射卫星图像进行匹配,可以实现快速且无误差累积的无人机定位。
目前遇到困难和挑战:
1、现有的无人机视觉定位方法虽然能够实现自主视觉定位,但在没有误差累积的情况下,需要匹配无人机的地面视角图像与正射卫星地图,这在数据收集上成本较高,导致大规模实际场景数据集的稀缺。
2、现有的无人机视觉定位数据集通常局限于较小的地理区域或仅关注具有明显纹理的城市区域。
3、现有的跨视角图像地理定位数据集无法满足实际需求,存在任务简单、飞行高度低和场景单一等缺点。
数据集地址:UAV-VisLoc - 用于无人机视觉定位的大规模数据集|
二、让我们一起看一下UAV-VisLoc数据集
UAV-VisLoc是一个大规模的无人机视觉定位数据集,包含中国11个不同地点的6742张无人机图像和11幅卫星地图,覆盖了多种地形特征。
UAV-VisLoc数据集包含了固定翼无人机和多地形无人机在不同高度和方向上捕获的图像。每张无人机图像都配有经纬度、高度、拍摄日期和飞行方向角等元数据。此外,还提供了覆盖大地理区域的正射遥感地图,每像素都标注有坐标。
UAV-VisLoc数据集构建:
数据集的构建过程包括在中国不同地点收集无人机图像,如江苏省、太湖沿岸、长江流域、东华园镇、云南省和甘肃省。这些图像覆盖了复杂的地形和地貌特征,如村庄、城镇、农场、城市、河流、山丘和森林。图像在不同高度和不同航向角下捕获,包括多旋翼和固定翼无人机。
UAV-VisLoc数据集特点:
1、固定翼无人机图像。固定翼无人机具有续航能力强、飞行高度高等特点,现已广泛应用于测绘、农业和侦察行业。因此,除了多旋翼无人机外,我们的数据集还补充了固定翼无人机在更高高度捕获的无人机图像,以适应多域模型训练和测试。
2、多地形无人机图像。我们的数据集包含各种地貌纹理特征的无人机图像,如村庄、城镇、农场、城市、河流、丘陵等,覆盖了中国大部分地区。
3、多高度和多航向角无人机图像。我们的数据集包含不同高度的无人机图像,既有低海拔城市场景,也有高海拔野外场景。我们的数据集还包含飞行航向角信息,有利于后续的相关研究。
4、大规模视觉定位数据集。此数据集提供了足够的数据来支持模型的训练和测试。详细来说,它有 6,742 张无人机图像和 11 张卫星地图。
数据集提供了训练和测试模型的样本。视觉定位任务的目标是在卫星地图中找到最相似的地图,以定位无人机的纬度和经度坐标。此外,无人机还可以根据其飞行历史,找到最相关的地方(无人机图像),并导航回目标地点。
基准测试 :
数据集提供了一个基准,用于评估无人机视觉定位方法在实际场景中的表现。通过将无人机拍摄的地面图像与卫星地图进行匹配,可以确定无人机的当前位置坐标。
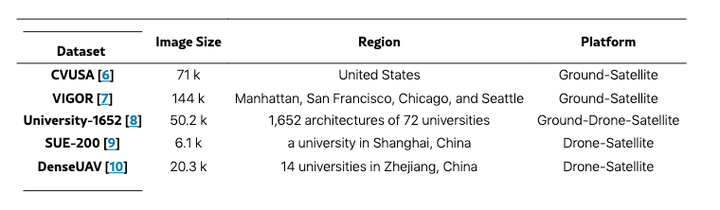
相关 UAV 视觉定位数据集的摘要。
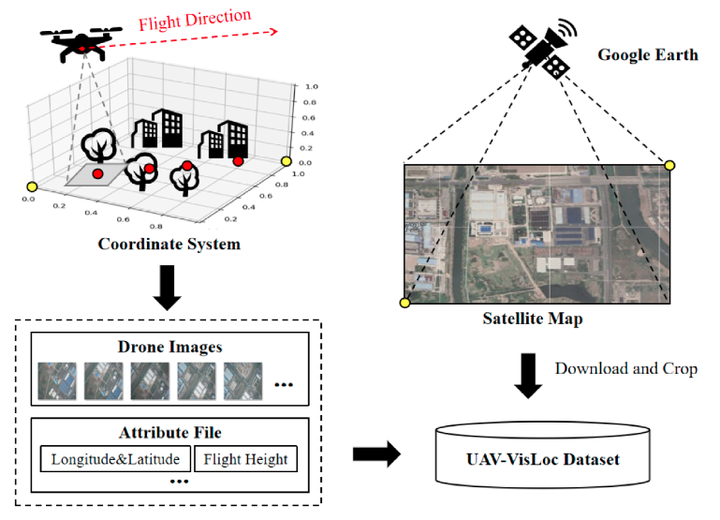
数据集收集过程。坐标系中的红点表示无人机当前位置在地面上的投影,即无人机拍摄的图像中心点。黄点表示整个飞行距离的卫星地图边界。
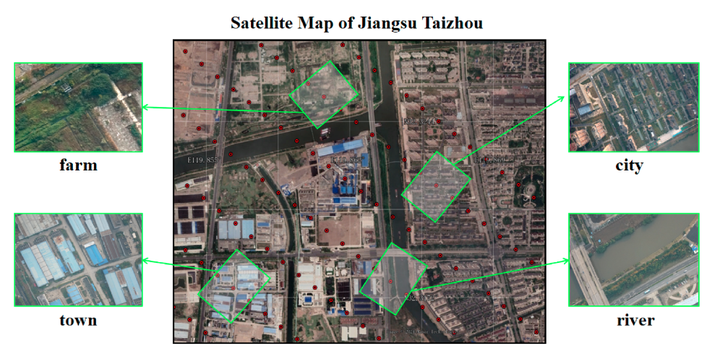
无人机图像和卫星地图的示例。卫星地图中的红点表示无人机图像的中心点。卫星地图包括各种地形,例如城市、城镇、农场和河流。我们还展示了这些地形的无人机图像。
三、让我们一起展望UAV-VisLoc数据集应用场景
比如,我是一名农业监测专家,我的工作是利用无人机技术来监测农田中的作物生长状况。以前,我们常常依赖人工巡查,这不仅耗时耗力,而且容易出现误差。
现在,我们使用搭载UAV-VisLoc数据集训练的无人机系统,工作变得高效多了。
我现在的工作流程:
-
无人机飞行与图像采集: 我们的无人机会在设定的飞行路径上自动巡航,无人机搭载了高分辨率相机,能够拍摄到清晰的作物图像。每次飞行,我们会设定航向重叠率、旁向重叠率,以确保图像覆盖的完整性。
-
数据处理与分析: 无人机返航后,系统会自动下载拍摄的图像,并通过图像处理软件进行拼接,生成正射影像。接下来,我们利用UAV-VisLoc数据集中的信息,结合图像分析工具,识别出作物的健康区域和病虫害区域。例如,我们会计算NDVI(归一化植被指数)来评估作物的健康状况。
-
生长趋势分析: 通过对多期影像数据进行对比,我们可以分析作物的生长趋势。比如,比较不同时间段内同一块农田的NDVI值,能够直观地看到作物生长的变化。这一过程不仅提高了监测的准确性,还能及时发现潜在问题。
-
精准农业管理: 基于分析结果,我们会制定施肥、灌溉的精准方案,指导农民进行科学管理。例如,如果某个区域的NDVI值低于预设标准,我们会建议农民增加该区域的施肥量,以促进作物生长。
通过使用这个系统,我们能够在短时间内获取大量的作物生长数据,极大地提高了监测的效率和准确性。利用无人机技术和大数据分析,我们能够更好地服务于现代农业,推动农业的智能化发展。