重定向
2024/9/20 6:51:48
Nuxt Kit 中的页面和路由管理
title: Nuxt Kit 中的页面和路由管理 date: 2024/9/17 updated: 2024/9/17 author: cmdragon
excerpt: 摘要:本文介绍了Nuxt Kit中页面和路由管理的高级功能,包括extendPages自定义页面路由、extendRouteRules定义复杂路由逻辑及addRouteMiddleware注册路由中间件。通过这…

高级java每日一道面试题-2024年8月03日-web篇-forward和redirect有什么区别?
如果有遗漏,评论区告诉我进行补充
面试官: forward和redirect有什么区别?
我回答:
在Java Web开发中,forward和redirect是Servlet容器提供的两种用于页面跳转的技术。它们的主要区别在于客户端感知的方式、URL地址的变化、请求对象的共享等方面。下面详细介绍两…
Linux Shell面试题大全及参考答案(3万字长文)
目录
解释Shell脚本是什么以及它的主要用途
主要用途
Shell脚本中的注释如何编写?
如何在Shell脚本中定义和使用变量?
Shell支持哪些数据类型?
什么是Shell的命令替换?请举例说明。
管道(pipe)和重定向(redirection)有什么区别?
如何在Shell脚本中使用条件语句…
Nuxt Kit 中的页面和路由管理
title: Nuxt Kit 中的页面和路由管理 date: 2024/9/17 updated: 2024/9/17 author: cmdragon
excerpt: 摘要:本文介绍了Nuxt Kit中页面和路由管理的高级功能,包括extendPages自定义页面路由、extendRouteRules定义复杂路由逻辑及addRouteMiddleware注册路由中间件。通过这…

Linux系统编程实现ls -l | wc -l指令
由于该指令是通过管道的形式实现的,所以我们要使用系统函数pipe。ls -l |wc -l的作用就是统计当前目录有多少文件。如果又父进程实现ls -l,子进程实现wc -l指令,代码如下:
#include<unistd.h>
#include<stdio.h>
#in…

Linux命令分享 三 (ubuntu 16.04)
1、‘>’ >>输出重定向 用法:命令 参数 > 文件 ls > a.txt ‘>’ 将一个命令的结果不输出到屏幕上,输出到文件中,如果文件不存在就创建文件,如果存在就覆盖文件。 ls >> a.txt ‘>>’ 如果文件不存…
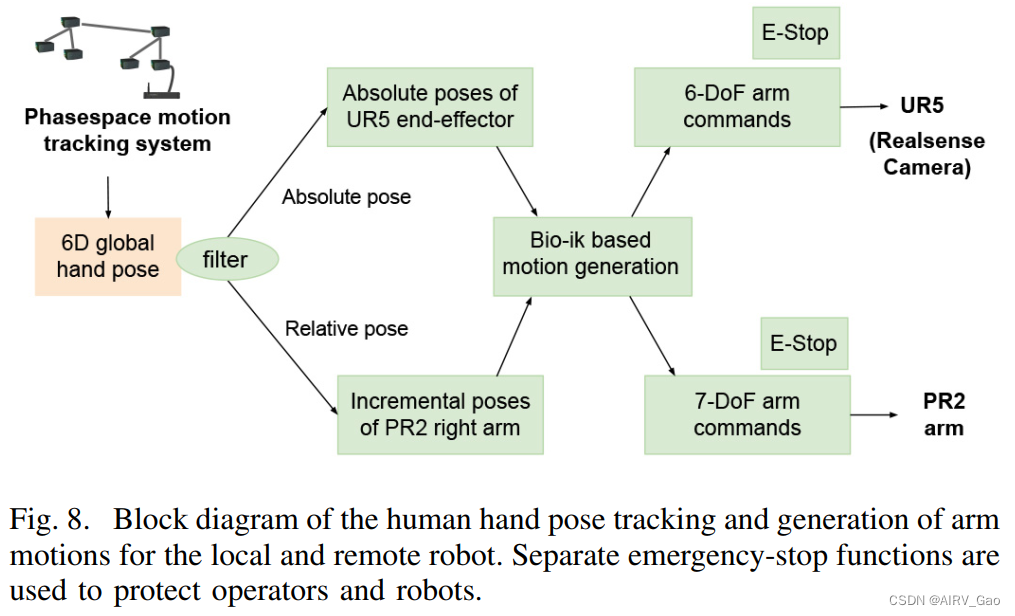
A Dexterous Hand-Arm Teleoperation System
A Dexterous Hand-Arm Teleoperation System Based on Hand Pose Estimation and Active Vision解读 摘要1. 简介2.相关工作2.1 机器人遥操作2.2 主动视觉(Active Vision) 3. 硬件设置4. 基于视觉的机器人手部姿态估计4.1 Transteleop4.2 Dataset 5. 主动…
Linux命令分享 三 (ubuntu 16.04)
1、‘>’ >>输出重定向 用法:命令 参数 > 文件 ls > a.txt ‘>’ 将一个命令的结果不输出到屏幕上,输出到文件中,如果文件不存在就创建文件,如果存在就覆盖文件。 ls >> a.txt ‘>>’ 如果文件不存…

vue3项目打包后多级嵌套路由子路由刷新后空白问题
问题描述
Vue3项目打包发布后,进入个人中心界面,刷新后页面出现空白。前提是已经配置了重定向到index.html。在访问/personal/profile这种路由的时候刷新后页面会出现空白。在App.vue中有一个routerview ,personal界面中有一个routerview .界面如图所示 router.js…

【python】flask服务端响应与重定向处理
✨✨ 欢迎大家来到景天科技苑✨✨
🎈🎈 养成好习惯,先赞后看哦~🎈🎈 🏆 作者简介:景天科技苑 🏆《头衔》:大厂架构师,华为云开发者社区专家博主,阿里云开发者社区专家博主,CSDN新星创作者,掘金优秀博主,51CTO博客专家等。 🏆《博客》:Python全栈,前后…
A Dexterous Hand-Arm Teleoperation System
A Dexterous Hand-Arm Teleoperation System Based on Hand Pose Estimation and Active Vision解读 摘要1. 简介2.相关工作2.1 机器人遥操作2.2 主动视觉(Active Vision) 3. 硬件设置4. 基于视觉的机器人手部姿态估计4.1 Transteleop4.2 Dataset 5. 主动…
【Linux的文件篇章 - 文件I/O和文件描述符】
Linux学习笔记---011 Linux之文件I/O和文件描述符1、回顾C文件I/O的基本操作1.1、先看代码和现象 2、提炼一下对文件的更深的理解(第一阶段)3、理解文件4、文件描述符fd4.1、先用系统调用的文件操作函数。4.2、标记位传参的理解4.3、open参数的功能4.4、回顾一些细节问题 5、系…