具身智能
2024/9/18 12:05:30
具身智能猜想 ——机器人进化
设想一个机器人进化的仿真模拟环境,可以通过 “基因突变” 产生新功能,让机器人逐步进化。以下是这个进化系统的关键要素和可能的实现步骤:
1. 仿真环境
虚拟世界:创建一个包含多样化任务和挑战的虚拟环境,如探索、抓…

具身智能的 Scaling Law
Scaling Law
具身智能的Scaling Law指的是一种理论,它探讨了具备智能的生物或机器系统随着规模的扩展而表现出的一些规律性变化。这个理论涵盖了许多方面,主要关注智能系统的不同尺度之间的相互关系。
具身智能是指生物或机器系统在其环境中感知、行动…
具身智能猜想 ——机器人进化
设想一个机器人进化的仿真模拟环境,可以通过 “基因突变” 产生新功能,让机器人逐步进化。以下是这个进化系统的关键要素和可能的实现步骤:
1. 仿真环境
虚拟世界:创建一个包含多样化任务和挑战的虚拟环境,如探索、抓…

最大负载1kg!高度模块化设计!大象机器人智能遥控操作机械臂组合myArm MC
引入 近年来,市面上涌现了许多类似于斯坦福大学的 Alopha 机器人项目,这些项目主要通过模仿人类的运动轨迹来进行学习,实现了仿人类的人工智能。Alopha 机器人通过先进的算法和传感技术,能够精确复制人类的动作,并从中…
大模型时代的具身智能系列专题(五)
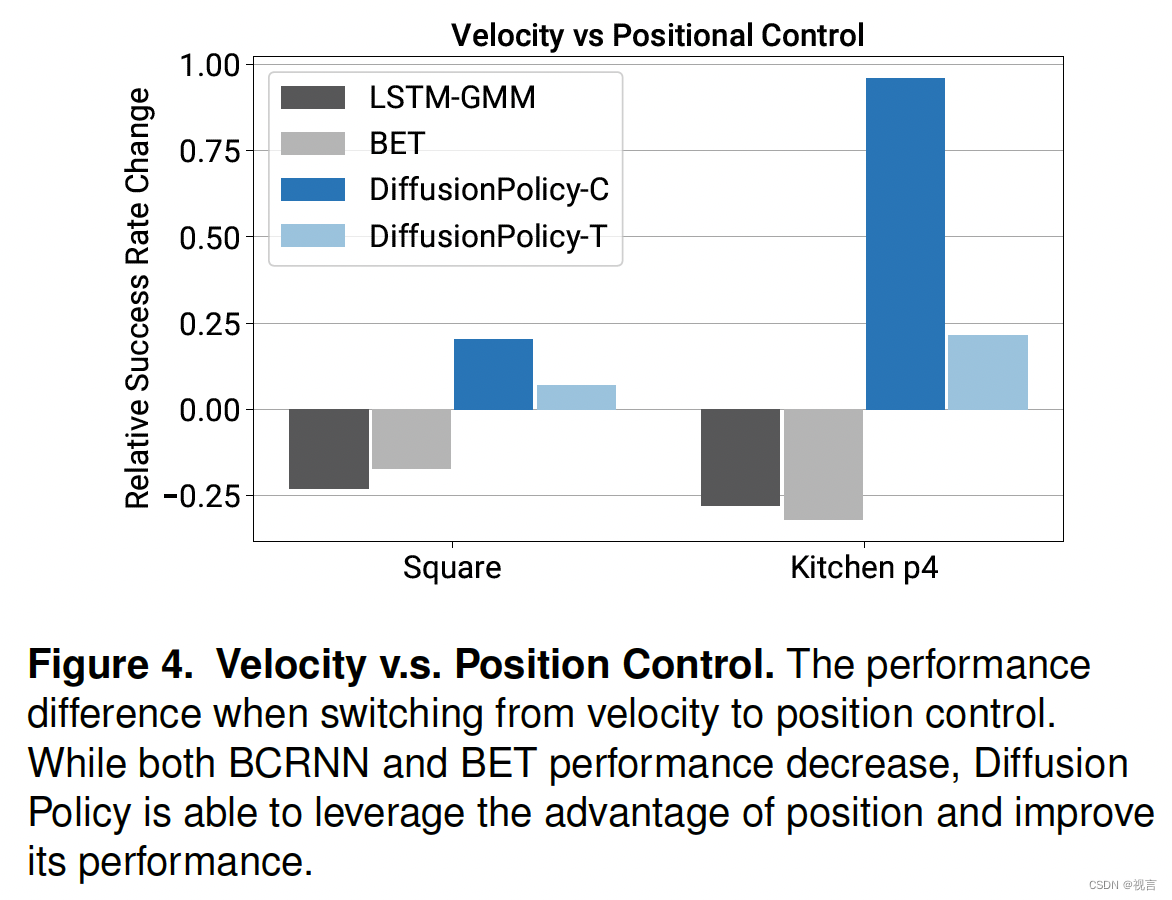
stanford宋舒然团队
宋舒然是斯坦福大学的助理教授。在此之前,他曾是哥伦比亚大学的助理教授,是Columbia Artificial Intelligence and Robotics Lab的负责人。他的研究聚焦于计算机视觉和机器人技术。本科毕业于香港科技大学。
主题相关作品 diffusio…

Open-TeleVision——通过VR沉浸式感受人形机器人视野:兼备远程控制和深度感知能力
前言
7.3日,我司七月在线(集AI大模型职教、应用开发、机器人解决方案为一体的科技公司)的「大模型机器人(具身智能)线下营」群里的一学员发了《Open-TeleVision: Teleoperation with Immersive Active Visual Feedback》这篇论文的链接
我当时快速看了一遍&#x…

使用myAGV、Jetson Nano主板和3D摄像头,实现了RTAB-Map的三维建图功能!
引言 在现代机器人技术中,高精度的环境感知与建图是实现自主导航的关键。本文将展示如何使用myAGV Jetson Nano移动平台搭载Jetson Nano BO1主板,结合RTAB-Map和3D相机,实现更加立体和细致的环境建图。myAGV Jetson Nano具备SLAM雷达导航功能…

大模型时代的具身智能系列专题(七)
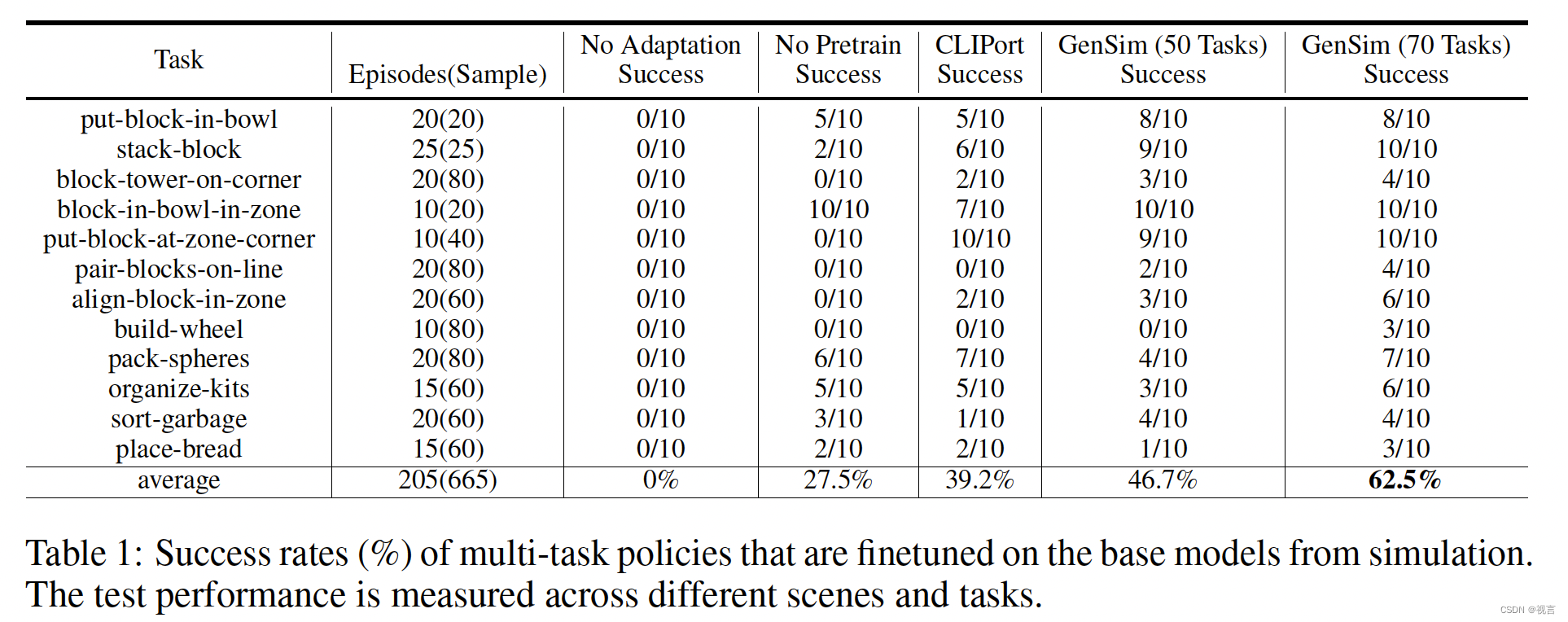
北大王鹤团队
王鹤,北京大学前沿计算研究中心助理教授,本科毕业于清华大学,博士毕业于斯坦福大学,师从美国三院院士Leonidas. J Guibas教授。他创立并领导了具身感知与交互实验室(EPIC Lab),实验室立足三维视觉感知与…
具身智能的 Scaling Law
Scaling Law
具身智能的Scaling Law指的是一种理论,它探讨了具备智能的生物或机器系统随着规模的扩展而表现出的一些规律性变化。这个理论涵盖了许多方面,主要关注智能系统的不同尺度之间的相互关系。
具身智能是指生物或机器系统在其环境中感知、行动…
大模型时代的具身智能系列专题(六)
UCSD 王小龙组
王小龙是UCSD电子与计算机工程系的助理教授。他曾在加州大学伯克利分校与Alexei Efros和Trevor Darrell一起担任博士后研究员,在CMU RI获得了机器人学博士学位,师从Abhinav Gupta。他的研究重点是通过视频和物理机器人交互数据来学习3D和…
Open-TeleVision——通过VR沉浸式感受人形机器人视野:兼备远程控制和深度感知能力
前言
7.3日,我司七月在线(集AI大模型职教、应用开发、机器人解决方案为一体的科技公司)的「大模型机器人(具身智能)线下营」群里的一学员发了《Open-TeleVision: Teleoperation with Immersive Active Visual Feedback》这篇论文的链接
我当时快速看了一遍&#x…
具身智能的 Scaling Law
Scaling Law
具身智能的Scaling Law指的是一种理论,它探讨了具备智能的生物或机器系统随着规模的扩展而表现出的一些规律性变化。这个理论涵盖了许多方面,主要关注智能系统的不同尺度之间的相互关系。
具身智能是指生物或机器系统在其环境中感知、行动…
大模型时代的具身智能系列专题(四)
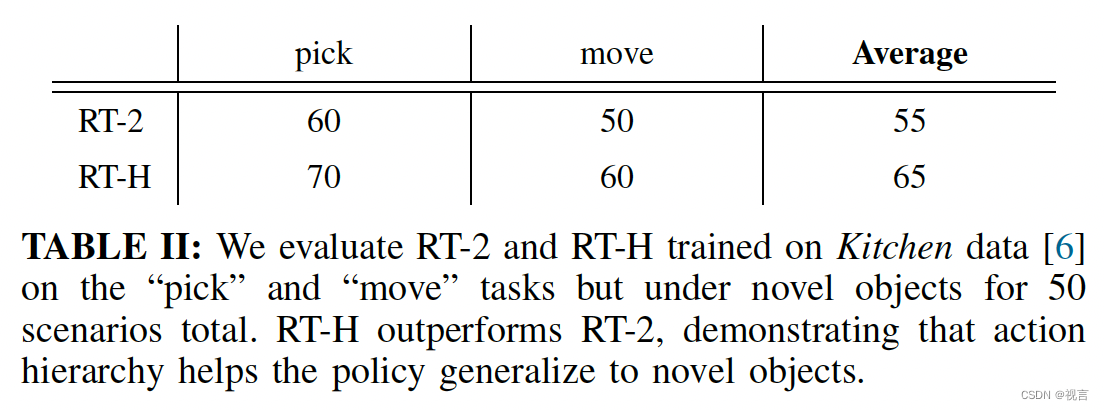
google deepmind团队
谷歌旗下最大的两个 AI 研究机构——地处伦敦 DeepMind 与位于硅谷的 Google Brain 合并成立新部门 Google DeepMind。其将机器学习和系统神经科学的最先进技术结合起来,建立强大的通用学习算法。代表作有AlphaGo,AlphaStar&#x…
使用myAGV、Jetson Nano主板和3D摄像头,实现了RTAB-Map的三维建图功能!
引言 在现代机器人技术中,高精度的环境感知与建图是实现自主导航的关键。本文将展示如何使用myAGV Jetson Nano移动平台搭载Jetson Nano BO1主板,结合RTAB-Map和3D相机,实现更加立体和细致的环境建图。myAGV Jetson Nano具备SLAM雷达导航功能…
大模型时代的具身智能系列专题(五)
stanford宋舒然团队
宋舒然是斯坦福大学的助理教授。在此之前,他曾是哥伦比亚大学的助理教授,是Columbia Artificial Intelligence and Robotics Lab的负责人。他的研究聚焦于计算机视觉和机器人技术。本科毕业于香港科技大学。
主题相关作品 diffusio…