机械臂
2024/9/25 17:15:22
UR机械臂位置数据旋转矢量与欧拉角变换
UR机械臂位置数据旋转矢量与欧拉角变换 本文介绍在UR机械臂控制过程在,使用函数返回的数据为旋转矢量,但是该数据对于控制非常不友好,我们需要将旋转转化为欧拉角的数据,才可以直观观察到工具端相对于不同轴旋转的角度。本文针…
技术融合与创新大象机器人水星Mercury X1人形机器人案例研究!
引言 在科技迅速发展的当下,人形机器人正变得日益重要,其应用范围从工业自动化到服务业不断扩展。本文将通过Mercury X1大象人形机器人的案例,探讨如何利用尖端技术如大型语言模型(LLM)、同时定位与映射(SL…

使用水星Mecury人形机器人搭建VR遥操作控制平台!
VR遥操作机械臂是一种将虚拟现实技术与机械臂控制相结合的系统,使用户可以通过虚拟现实设备操控和交互实际的机械臂。这种技术可以应用于多个领域,包括远程操作、培训、危险环境中的工作等。 双臂人形机器人是一种模拟人体上半身结构,包括头部…

视觉机械臂抓取——流程总览
视觉机械臂抓取 简单介绍两大部分:两种控制方式:抓取流程机械臂部分正逆解路径规划 感知部分相机找物体的方法 简单介绍
主要包含两个部分,两种控制方式。
两大部分:
机械臂部分感知部分:包含不仅限视觉感知也会设计…
技术融合与创新大象机器人水星Mercury X1人形机器人案例研究!
引言 在科技迅速发展的当下,人形机器人正变得日益重要,其应用范围从工业自动化到服务业不断扩展。本文将通过Mercury X1大象人形机器人的案例,探讨如何利用尖端技术如大型语言模型(LLM)、同时定位与映射(SL…
技术融合与创新大象机器人水星Mercury X1人形机器人案例研究!
引言 在科技迅速发展的当下,人形机器人正变得日益重要,其应用范围从工业自动化到服务业不断扩展。本文将通过Mercury X1大象人形机器人的案例,探讨如何利用尖端技术如大型语言模型(LLM)、同时定位与映射(SL…
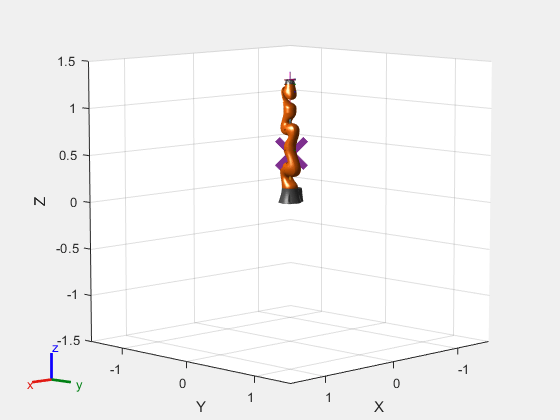
MATLAB - 机器人动力学 - 质心(Center of Mass)
系列文章目录 前言 一、用法 com centerOfMass(robot) com centerOfMass(robot,configuration) [com,comJac] centerOfMass(robot,configuration) 二、说明
com centerOfMass(robot) 计算机器人模型在原点构型处相对于基础坐标系的质心位置。com centerOfMass(robot,conf…

最大负载1kg!高度模块化设计!大象机器人智能遥控操作机械臂组合myArm MC
引入 近年来,市面上涌现了许多类似于斯坦福大学的 Alopha 机器人项目,这些项目主要通过模仿人类的运动轨迹来进行学习,实现了仿人类的人工智能。Alopha 机器人通过先进的算法和传感技术,能够精确复制人类的动作,并从中…
技术融合与创新大象机器人水星Mercury X1人形机器人案例研究!
引言 在科技迅速发展的当下,人形机器人正变得日益重要,其应用范围从工业自动化到服务业不断扩展。本文将通过Mercury X1大象人形机器人的案例,探讨如何利用尖端技术如大型语言模型(LLM)、同时定位与映射(SL…
MATLAB - 机器人动力学 - 质心(Center of Mass)
系列文章目录 前言 一、用法 com centerOfMass(robot) com centerOfMass(robot,configuration) [com,comJac] centerOfMass(robot,configuration) 二、说明
com centerOfMass(robot) 计算机器人模型在原点构型处相对于基础坐标系的质心位置。com centerOfMass(robot,conf…
齐次变换矩阵的原理与应用
齐次变换矩阵的原理与应用
通过齐次变换矩阵,可以描述机械臂末端执行器(法兰)在三维空间中的平移和旋转操作。该矩阵结合了旋转和平移信息,用于坐标变换。
1. 齐次变换矩阵的基本形式
一个齐次变换矩阵 T是一个 4x4 矩阵&#…
MATLAB - 机器人动力学 - 质心(Center of Mass)
系列文章目录 前言 一、用法 com centerOfMass(robot) com centerOfMass(robot,configuration) [com,comJac] centerOfMass(robot,configuration) 二、说明
com centerOfMass(robot) 计算机器人模型在原点构型处相对于基础坐标系的质心位置。com centerOfMass(robot,conf…
MATLAB - 机器人动力学 - 质心(Center of Mass)
系列文章目录 前言 一、用法 com centerOfMass(robot) com centerOfMass(robot,configuration) [com,comJac] centerOfMass(robot,configuration) 二、说明
com centerOfMass(robot) 计算机器人模型在原点构型处相对于基础坐标系的质心位置。com centerOfMass(robot,conf…
齐次变换矩阵的原理与应用
齐次变换矩阵的原理与应用
通过齐次变换矩阵,可以描述机械臂末端执行器(法兰)在三维空间中的平移和旋转操作。该矩阵结合了旋转和平移信息,用于坐标变换。
1. 齐次变换矩阵的基本形式
一个齐次变换矩阵 T是一个 4x4 矩阵&#…
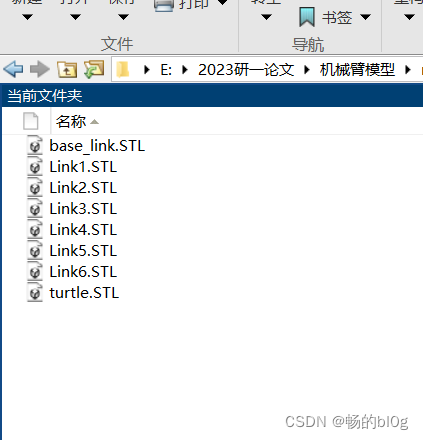
机械臂模型更换成自己的urdf模块
1.将urdf生成slx文件
smimport(rm_65_flange.urdf);%生成Simscape物理模型 2.更换joint部分(对应与几个输入几个输出)(依次更换) 3.更改关节部分(依次更换) 找到urdf文件夹下的meshes文件夹,看…
机械臂模型更换成自己的urdf模块
1.将urdf生成slx文件
smimport(rm_65_flange.urdf);%生成Simscape物理模型 2.更换joint部分(对应与几个输入几个输出)(依次更换) 3.更改关节部分(依次更换) 找到urdf文件夹下的meshes文件夹,看…