环境感知
2024/10/18 12:21:46
16册 | 移动机器人(自动驾驶)系列
此文档整理推荐了16本移动机器人(自动驾驶)相关的书籍,内容包括:ROS、机器人基础开发、分布式机器人控制、集群机器人控制、嵌入式机器人、多传感器融合等等。
学习,切勿急于求成,读书自学,需多…
16册 | 移动机器人(自动驾驶)系列
此文档整理推荐了16本移动机器人(自动驾驶)相关的书籍,内容包括:ROS、机器人基础开发、分布式机器人控制、集群机器人控制、嵌入式机器人、多传感器融合等等。
学习,切勿急于求成,读书自学,需多…
16册 | 移动机器人(自动驾驶)系列
此文档整理推荐了16本移动机器人(自动驾驶)相关的书籍,内容包括:ROS、机器人基础开发、分布式机器人控制、集群机器人控制、嵌入式机器人、多传感器融合等等。
学习,切勿急于求成,读书自学,需多…
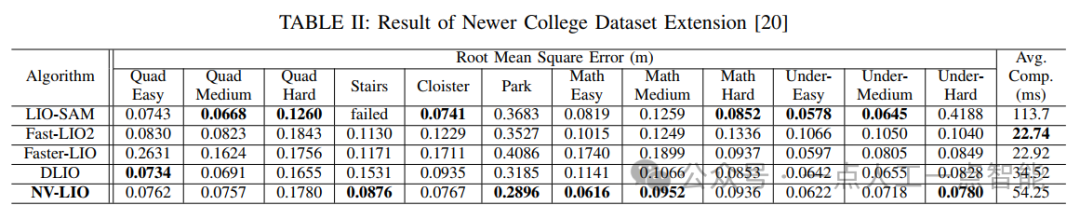
NV-LIO:一种基于法向量的激光雷达-惯性系统(LIO)
论文:NV-LIO: LiDAR-Inertial Odometry using Normal Vectors Towards Robust SLAM in Multifloor Environments
作者:Dongha Chung, Jinwhan Kim
NV-LIO:一种基于法向量的激光雷达-惯性系统(LIO)NV-LIO利用从激光雷…
16册 | 移动机器人(自动驾驶)系列
此文档整理推荐了16本移动机器人(自动驾驶)相关的书籍,内容包括:ROS、机器人基础开发、分布式机器人控制、集群机器人控制、嵌入式机器人、多传感器融合等等。
学习,切勿急于求成,读书自学,需多…
16册 | 移动机器人(自动驾驶)系列
此文档整理推荐了16本移动机器人(自动驾驶)相关的书籍,内容包括:ROS、机器人基础开发、分布式机器人控制、集群机器人控制、嵌入式机器人、多传感器融合等等。
学习,切勿急于求成,读书自学,需多…

基于全局与局部感知网络的超高清图像去雾方法
作者:郑卓然,魏绎汶,贾修一
来源:《智能系统学报》
编辑:东岸因为一点人工一点智能公众号
基于全局与局部感知网络的超高清图像去雾方法该模型的关键是使用全局特征提取分支的空间MLP混合器。空间MLP混合器可以帮助…
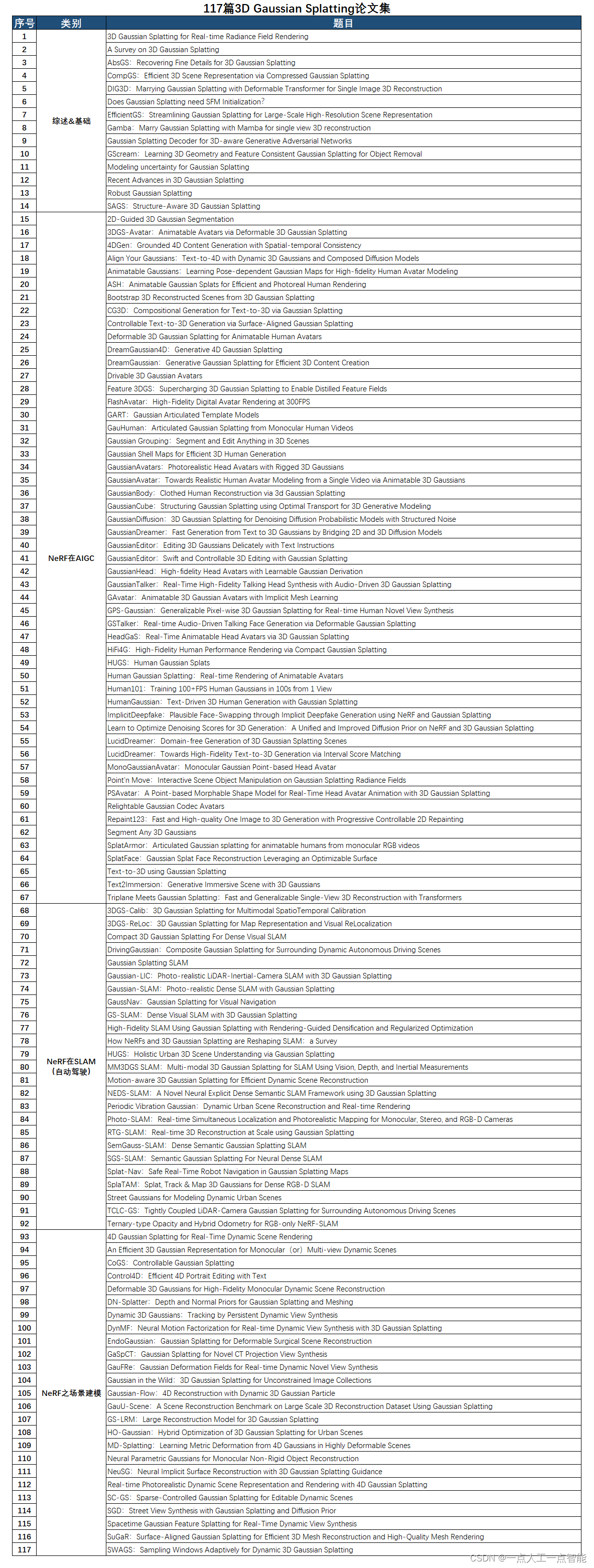
117篇 | 3D Gaussian Splatting论文
本论文集划分为4个部分:综述&基础(14篇)、NeRF在AIGC(54篇)、NeRF在SLAM(自动驾驶)(25篇)、NeRF之场景建模(25篇)
https://t.zsxq.com/3ATyE…
117篇 | 3D Gaussian Splatting论文
本论文集划分为4个部分:综述&基础(14篇)、NeRF在AIGC(54篇)、NeRF在SLAM(自动驾驶)(25篇)、NeRF之场景建模(25篇)
https://t.zsxq.com/3ATyE…

基于C++的数字图像处理
书籍:Digital Image Processing with C:Implementing Reference Algorithms with the CImg Library
作者:David Tschumperle,Christophe Tilmant,Vincent Barra
出版:CRC Press
书籍推荐-《基于C的数字图…