轨迹规划
2024/10/10 15:19:58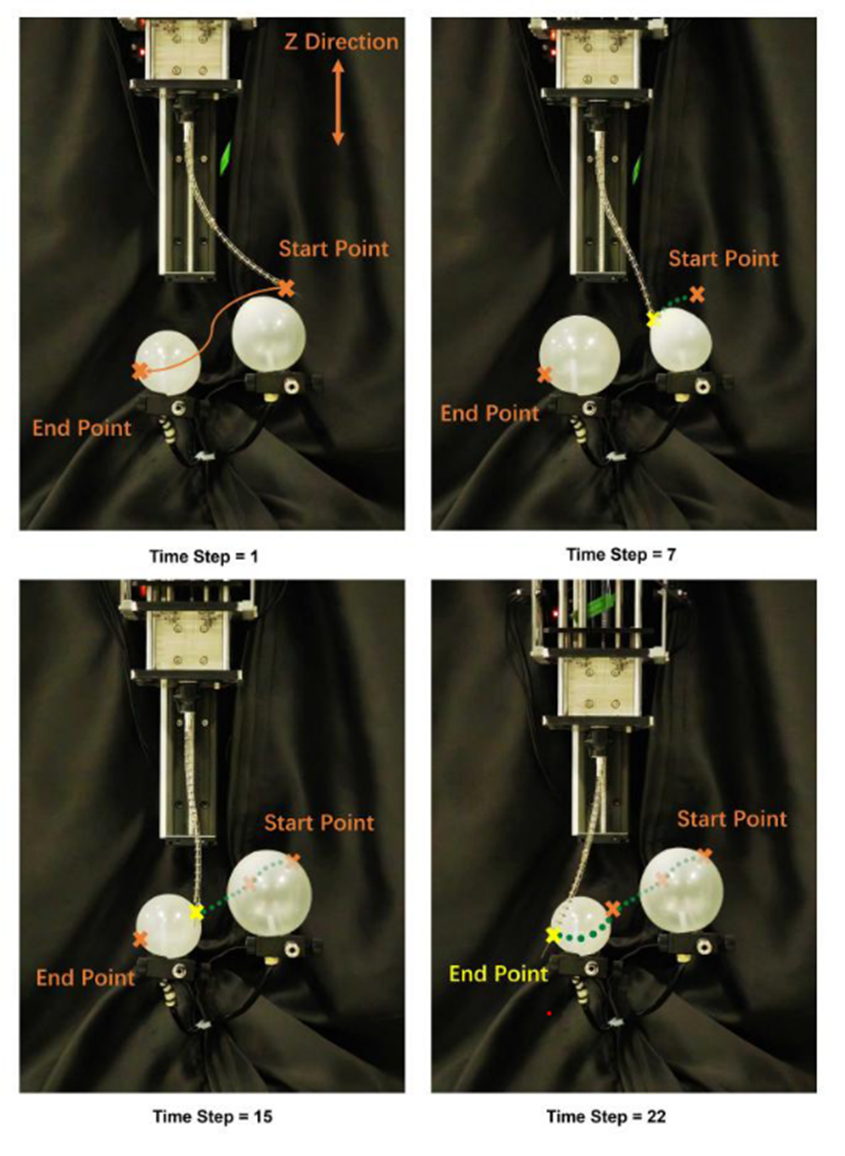
ICRA 2024 成果介绍:基于 RRT* 的连续体机器人高效轨迹规划方法
近来,连续体机器人研究受到越来越多的关注。其灵活度高,可以调整形状适应动态环境,特别适合于微创手术、工业⽣产以及危险环境探索等应用。 连续体机器人拥有无限自由度(DoF),为执行空间探索等任务提供了灵…
MATLAB - 机器人机械臂设计轨迹规划器
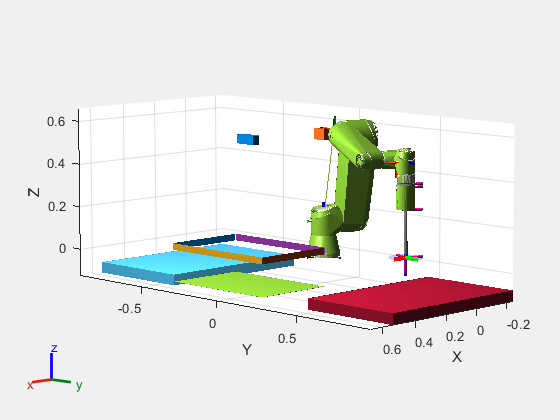
系列文章目录 前言 本示例介绍了一种设计抓取和轨迹规划器的方法,该规划器可用于垃圾箱拣选系统。 在机器人技术中,垃圾箱拣选包括使用机械手从垃圾箱中取出物品。智能垃圾箱拣选是这一过程的高级版本,具有更强的自主性。使用摄像系统感知部件…

面向新手在无人机竞速场景下的飞行辅助系统——浙大 FAST-Lab 高飞团队 ICRA 论文三项 Best Paper 入围
恭喜浙江大学 FAST-Lab 钟宇航同学的论文 A Trajectory-based Flight Assistive System for Novice Pilots in Drone Racing Scenario 顺利发表 ICRA 2024,并同时入选三项 Finalist:
the IEEE ICRA Best Conference Paper Awardthe IEEE ICRA Best Pape…
面向新手在无人机竞速场景下的飞行辅助系统——浙大 FAST-Lab 高飞团队 ICRA 论文三项 Best Paper 入围
恭喜浙江大学 FAST-Lab 钟宇航同学的论文 A Trajectory-based Flight Assistive System for Novice Pilots in Drone Racing Scenario 顺利发表 ICRA 2024,并同时入选三项 Finalist:
the IEEE ICRA Best Conference Paper Awardthe IEEE ICRA Best Pape…
面向新手在无人机竞速场景下的飞行辅助系统——浙大 FAST-Lab 高飞团队 ICRA 论文三项 Best Paper 入围
恭喜浙江大学 FAST-Lab 钟宇航同学的论文 A Trajectory-based Flight Assistive System for Novice Pilots in Drone Racing Scenario 顺利发表 ICRA 2024,并同时入选三项 Finalist:
the IEEE ICRA Best Conference Paper Awardthe IEEE ICRA Best Pape…

基于LQR算法的机器人轨迹跟踪控制详解
本文摘要 本文详细介绍了基于线性二次型调节器(LQR)算法的机器人轨迹跟踪控制方法。首先,文章通过建立基于运动学模型的离散状态方程,来描述机器人的当前状态与目标状态之间的关系,并利用此模型进行状态误差的计算。接…