文章目录
- 概述
- 相关文件路径
- 数据结构
- metadata关键函数接口
- allocate_camera_metadata (分配metadata)
- find_camera_metadata_entry(从metadata中根据tag查找value)
- add_camera_metadata_entry(增加tag和value到metadata)
- delete_camera_metadata_entry(删除tag)
- update_camera_metadata_entry(更新tag的value值)
- tag分类
- android tag
- vendor tag
- tag 命名
概述
在Camera2 + HAL3的架构中,App --> Framework --> HAL通过metadata的方式来传递参数。metadata实际上就是一个参数对(key, value),比如设置AE mode为auto,传下来的是类似(10,1)这样的参数对(AE mode的key为10,参数auto的value为1)。然后在HAL中通过10来获取设置值1。
本文通过剖析metadata的数据结构以及一些关键函数调用来探索metadata的原理。
相关文件路径
/system/media/camera/include/system/camera_metadata_tags.h
/system/media/camera/src/camera_metadata.c
/system/media/camera/src/camera_metadata_tag_info.c
数据结构
在头文件 system/media/camera/include/system/camera_metadata.h 有如下定义:
struct camera_metadata;
typedef struct camera_metadata camera_metadata_t;
camera_metadata_t 就是外部访问使用metadata的结构体。
这里有一个很有意思的用法:camera_metadata_t 的类型实际上是 camera_metadata,而 camera_metadata 是在 camera_metadata.c 中实现的。
外部文件只能inlcude头文件camera_metadata.h,这意味着如果外部只能看到camera_metadata_t,不能看到camera_metadata。所以无法直接访问camera_metadata的成员。
操控camera_metadata的唯一方式就是通过调用camera_metadata.h提供的函数接口。通过这种方式,实现了C语言的封装功能。
描述camera metadata的数据结构如下:
(1) struct camera_metadata;
typedef uint32_t metadata_uptrdiff_t;
typedef uint32_t metadata_size_t;
typedef uint64_t metadata_vendor_id_t;struct camera_metadata {metadata_size_t size; // metadata的总大小uint32_t version; // CURRENT_METADATA_VERSION,一般是1uint32_t flags; // FLAG_SORTED,标记当前是否有对entry进行排序(根据entry的tag从小到大)。好处:排序后可以使用二分查找,可以提升性能。metadata_size_t entry_count; // 当前entry的数量,初始化为0metadata_size_t entry_capacity; // entry的最大数量metadata_uptrdiff_t entries_start; // entry的起始地址(类型为:camera_metadata_buffer_entry)metadata_size_t data_count; // 当前data的数量(类型为uint8),初始化为0metadata_size_t data_capacity; // data的最大数量metadata_uptrdiff_t data_start; // data的起始地址uint32_t padding; // 8字节对齐,不够就填充到这metadata_vendor_id_t vendor_id; // 标记平台的id,default值为CAMERA_METADATA_INVALID_ID
};
(2) struct camera_metadata_buffer_entry;
typedef struct camera_metadata_buffer_entry {uint32_t tag; // tag的key值uint32_t count; // tag的value对应的data的数量。比如data的类型为uint8_t ,count为100。则总共100个字节。union {uint32_t offset; // offset标记当前的key值对应的value在data_start中的位置uint8_t value[4]; // 当value占用的字节数<=4时,直接存储到这里(省空间)} data; uint8_t type; // TYPE_BYTE、TYPE_INT32、TYPE_FLOAT、TYPE_INT64、TYPE_DOUBLE、TYPE_RATIONALuint8_t reserved[3];
} camera_metadata_buffer_entry_t;
(3) struct camera_metadata_entry ;
typedef struct camera_metadata_entry {size_t index; // 该entry在当前metadta里面的index(0 ~ entry_count-1)uint32_t tag; // tag的key值uint8_t type; // TYPE_BYTE、TYPE_INT32、TYPE_FLOAT、TYPE_INT64、TYPE_DOUBLE、TYPE_RATIONALsize_t count; // tag的value对应的data的数量。比如data的类型为uint8_t ,count为100。则总共100个字节。union {uint8_t *u8;int32_t *i32;float *f;int64_t *i64;double *d;camera_metadata_rational_t *r;} data; // tag的value对应的data值
} camera_metadata_entry_t;
下图比较直观总结出三个结构体之间的关系:
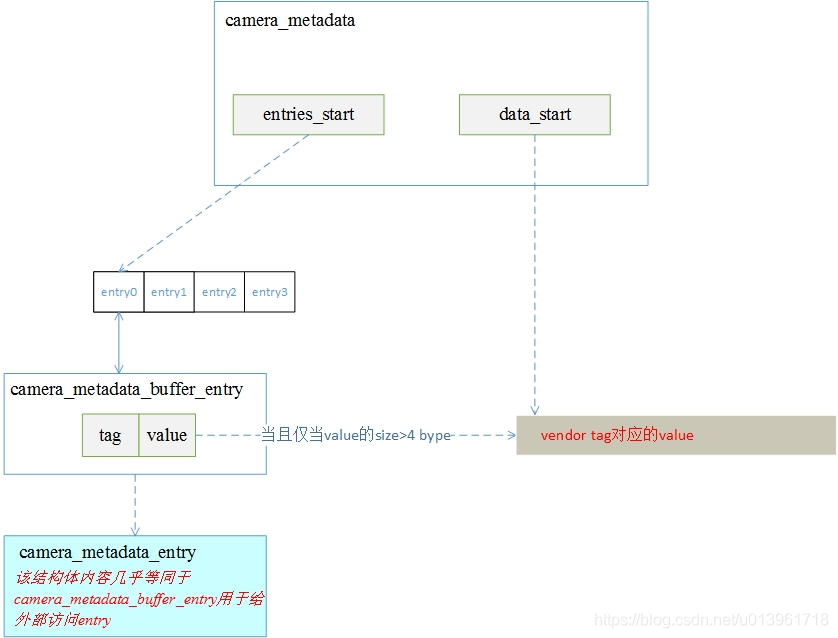
metadata的基本操作就是增(增加tag)、删(删除tag)、查(根据tag查找对应的value)、改(修改tag对应的value)。到这里metadata的原理基本上可以推导出来了,以“查”为例:
(1) 当用户拿到 camera_metadata 以及对应的tag后,需要从该meta中,找到对应的value。
(2) 从metadata的 entries_start 成员中可以拿到entry的首地址,再根据 entry_count 可以遍历所有的entry。
(3) 根据tag来逐一比较camera_metadata_buffer_entry中的 tag 。就可以找到该tag对应的entry。
(4) 根据 count 和 type 可以计算出value的字节数。当字节数<=4的时候,直接取 data.value;否则就根据 offset 从metadata的 data_start 找到对应的value。
(5) 将其转换为结构体 camera_metadata_entry_t,返回给用户。用户通过count和type就可以找到该tag对应的value啦。
PS:这里有一个非常重要也非常容易出bug的地方,就是返回的entry,里面的data指向的是实际数据的地址。
所以如果直接改写data里面的内容,会覆盖之前的数据。 一定要记得做memcpy。
metadata关键函数接口
如前文所提到,用户只能通过调用函数接口,来访问camera_metadata_t里面的内容。函数接口实现的源码位于:system/media/camera/src/camera_metadata.c。这个文件有上千行,这里仅提到几个关键的函数。
allocate_camera_metadata (分配metadata)
// 传入max entry和max data,给metadata分配地址空间
camera_metadata_t *allocate_camera_metadata(size_t entry_capacity, size_t data_capacity) {size_t memory_needed = calculate_camera_metadata_size(entry_capacity, data_capacity); // 1. 计算sizevoid *buffer = calloc(1, memory_needed); // 2. 分配memorycamera_metadata_t *metadata = place_camera_metadata( // 3. 生成metadatabuffer, memory_needed, entry_capacity, data_capacity);if (!metadata) {/* This should not happen when memory_needed is the same* calculated in this function and in place_camera_metadata.*/free(buffer);}return metadata;
}
size_t calculate_camera_metadata_size(size_t entry_count,size_t data_count) {size_t memory_needed = sizeof(camera_metadata_t);// Start entry list at aligned boundarymemory_needed = ALIGN_TO(memory_needed, ENTRY_ALIGNMENT);memory_needed += sizeof(camera_metadata_buffer_entry_t[entry_count]);// Start buffer list at aligned boundarymemory_needed = ALIGN_TO(memory_needed, DATA_ALIGNMENT);memory_needed += sizeof(uint8_t[data_count]);// Make sure camera metadata can be stacked in continuous memorymemory_needed = ALIGN_TO(memory_needed, METADATA_PACKET_ALIGNMENT);return memory_needed;
}
camera_metadata_t *place_camera_metadata(void *dst,size_t dst_size,size_t entry_capacity,size_t data_capacity) {if (dst == NULL) return NULL;size_t memory_needed = calculate_camera_metadata_size(entry_capacity,data_capacity);if (memory_needed > dst_size) return NULL;camera_metadata_t *metadata = (camera_metadata_t*)dst;metadata->version = CURRENT_METADATA_VERSION;metadata->flags = 0;metadata->entry_count = 0;metadata->entry_capacity = entry_capacity;metadata->entries_start =ALIGN_TO(sizeof(camera_metadata_t), ENTRY_ALIGNMENT);metadata->data_count = 0;metadata->data_capacity = data_capacity;metadata->size = memory_needed;size_t data_unaligned = (uint8_t*)(get_entries(metadata) +metadata->entry_capacity) - (uint8_t*)metadata;metadata->data_start = ALIGN_TO(data_unaligned, DATA_ALIGNMENT);metadata->vendor_id = CAMERA_METADATA_INVALID_VENDOR_ID;assert(validate_camera_metadata_structure(metadata, NULL) == OK);return metadata;
}
find_camera_metadata_entry(从metadata中根据tag查找value)
这个函数的基本逻辑可以参考上文描述从metadata中“查”tag的逻辑。
int find_camera_metadata_entry(camera_metadata_t *src, uint32_t tag, camera_metadata_entry_t *entry) {if (src == NULL) return ERROR;uint32_t index;if (src->flags & FLAG_SORTED) {// Sorted entries, do a binary searchcamera_metadata_buffer_entry_t *search_entry = NULL;camera_metadata_buffer_entry_t key;key.tag = tag;search_entry = bsearch(&key,get_entries(src),src->entry_count,sizeof(camera_metadata_buffer_entry_t),compare_entry_tags);if (search_entry == NULL) return NOT_FOUND;index = search_entry - get_entries(src);} else {// Not sorted, linear searchcamera_metadata_buffer_entry_t *search_entry = get_entries(src);for (index = 0; index < src->entry_count; index++, search_entry++) {if (search_entry->tag == tag) {break;}}if (index == src->entry_count) return NOT_FOUND;}return get_camera_metadata_entry(src, index,entry);
}
int get_camera_metadata_entry(camera_metadata_t *src,size_t index,camera_metadata_entry_t *entry) {if (src == NULL || entry == NULL) return ERROR;if (index >= src->entry_count) return ERROR;camera_metadata_buffer_entry_t *buffer_entry = get_entries(src) + index;entry->index = index;entry->tag = buffer_entry->tag;entry->type = buffer_entry->type;entry->count = buffer_entry->count;if (buffer_entry->count *camera_metadata_type_size[buffer_entry->type] > 4) {entry->data.u8 = get_data(src) + buffer_entry->data.offset;} else {entry->data.u8 = buffer_entry->data.value;}return OK;
}
add_camera_metadata_entry(增加tag和value到metadata)
int add_camera_metadata_entry(camera_metadata_t *dst, uint32_t tag, const void *data, size_t data_count) {// 1.根据tag,找到该tag对应的value的type。这个函数的具体实现不再粘贴出来,里面涉及到tag section相关结构体,后文描述int type = get_local_camera_metadata_tag_type(tag, dst); if (type == -1) {ALOGE("%s: Unknown tag %04x.", __FUNCTION__, tag);return ERROR;}// 2.将tag和data添加到metadata中。return add_camera_metadata_entry_raw(dst, tag, type, data, data_count);
}
static int add_camera_metadata_entry_raw(camera_metadata_t *dst, uint32_t tag, uint8_t type, const void *data, size_t data_count) {if (dst == NULL) return ERROR;if (dst->entry_count == dst->entry_capacity) return ERROR;if (data_count && data == NULL) return ERROR;// 1. 计算size,并进行4字节判断。如果小于4字节,将返回0。size_t data_bytes = calculate_camera_metadata_entry_data_size(type, data_count);if (data_bytes + dst->data_count > dst->data_capacity) return ERROR;// 2. 计算数据的sizesize_t data_payload_bytes = data_count * camera_metadata_type_size[type];// 3. 生成camera_metadata_buffer_entry_tcamera_metadata_buffer_entry_t *entry = get_entries(dst) + dst->entry_count;memset(entry, 0, sizeof(camera_metadata_buffer_entry_t));entry->tag = tag;entry->type = type;entry->count = data_count;// 4. copy数据到entry中if (data_bytes == 0) {memcpy(entry->data.value, data, data_payload_bytes);} else {entry->data.offset = dst->data_count;memcpy(get_data(dst) + entry->data.offset, data,data_payload_bytes);dst->data_count += data_bytes;}// 5. 增加一个entrydst->entry_count++;dst->flags &= ~FLAG_SORTED; // add后,是没有经过排序的assert(validate_camera_metadata_structure(dst, NULL) == OK);return OK;
}size_t calculate_camera_metadata_entry_data_size(uint8_t type,size_t data_count) {if (type >= NUM_TYPES) return 0;size_t data_bytes = data_count *camera_metadata_type_size[type];return data_bytes <= 4 ? 0 : ALIGN_TO(data_bytes, DATA_ALIGNMENT);
}
delete_camera_metadata_entry(删除tag)
删除的逻辑相对有点复杂,因为tag对应的value可能在data数组的中间,需要后面的内容,覆盖要删除的内容。
int delete_camera_metadata_entry(camera_metadata_t *dst, size_t index) {if (dst == NULL) return ERROR;if (index >= dst->entry_count) return ERROR;// 1. 根据index,找到对应的entrycamera_metadata_buffer_entry_t *entry = get_entries(dst) + index;// 2. 获取value的sizesize_t data_bytes = calculate_camera_metadata_entry_data_size(entry->type,entry->count);if (data_bytes > 0) {// 3. data_bypes > 0,value的size>4字节,所以存储的data数组中// 这里开始对data数组的内容进行memmove// Shift data buffer to overwrite deleted datauint8_t *start = get_data(dst) + entry->data.offset;uint8_t *end = start + data_bytes;size_t length = dst->data_count - entry->data.offset - data_bytes; // data_count是数组总长度,offset是value的起始位置,data_types是value的长度。相减就是value后面的数据的长度memmove(start, end, length); // value后面的数据向前移动到start位置,从end开始计算length个字节// 4. 更新当前tag之后的entry的offset// Update all entry indices to account for shiftcamera_metadata_buffer_entry_t *e = get_entries(dst);size_t i;for (i = 0; i < dst->entry_count; i++) {if (calculate_camera_metadata_entry_data_size(e->type, e->count) > 0 && e->data.offset > entry->data.offset) {e->data.offset -= data_bytes;}++e;}dst->data_count -= data_bytes;}// 5. 移动entry// Shift entry arraymemmove(entry, entry + 1, sizeof(camera_metadata_buffer_entry_t) * (dst->entry_count - index - 1) );dst->entry_count -= 1;assert(validate_camera_metadata_structure(dst, NULL) == OK);return OK;
}size_t calculate_camera_metadata_entry_data_size(uint8_t type,size_t data_count) {if (type >= NUM_TYPES) return 0;size_t data_bytes = data_count *camera_metadata_type_size[type];return data_bytes <= 4 ? 0 : ALIGN_TO(data_bytes, DATA_ALIGNMENT);
}
update_camera_metadata_entry(更新tag的value值)
在调用 update_camera_metadata_entry() 更新tag前,一定要通过 find_camera_metadata_entry() 找到对应的entry,通过该entry获取其index(即entry在metadata的index)。
PS:参数updated_entry,是用于获取update之后的tag。
int update_camera_metadata_entry(camera_metadata_t *dst,size_t index,const void *data,size_t data_count,camera_metadata_entry_t *updated_entry) {if (dst == NULL) return ERROR;if (index >= dst->entry_count) return ERROR;// 1. 根据index找到对应的entrycamera_metadata_buffer_entry_t *entry = get_entries(dst) + index;// 2. data_bytes是新的value的size,如果小于4,就是0; // data_payload_bytes是新的value真正的size;// entry_bytes是就的value的sizesize_t data_bytes = calculate_camera_metadata_entry_data_size(entry->type, data_count);size_t data_payload_bytes = data_count * camera_metadata_type_size[entry->type];size_t entry_bytes = calculate_camera_metadata_entry_data_size(entry->type, entry->count);if (data_bytes != entry_bytes) {// 新的value和旧的value的size不同时,需要进行下述操作// 3. 确定data的容量是否可以满足新的value// May need to shift/add to data arrayif (dst->data_capacity < dst->data_count + data_bytes - entry_bytes) {// No roomreturn ERROR;}// 4. 删除旧的tag对应的value,实现类似delete函数if (entry_bytes != 0) {// Remove old datauint8_t *start = get_data(dst) + entry->data.offset;uint8_t *end = start + entry_bytes;size_t length = dst->data_count - entry->data.offset - entry_bytes;memmove(start, end, length);dst->data_count -= entry_bytes;// Update all entry indices to account for shiftcamera_metadata_buffer_entry_t *e = get_entries(dst);size_t i;for (i = 0; i < dst->entry_count; i++) {if (calculate_camera_metadata_entry_data_size(e->type, e->count) > 0 &&e->data.offset > entry->data.offset) {e->data.offset -= entry_bytes;}++e;}}// 5. 将新的tag对应的value插入到最后方if (data_bytes != 0) {// Append new dataentry->data.offset = dst->data_count;memcpy(get_data(dst) + entry->data.offset, data, data_payload_bytes);dst->data_count += data_bytes;}} else if (data_bytes != 0) {// 6. data的size相等时直接override// data size unchanged, reuse same data locationmemcpy(get_data(dst) + entry->data.offset, data, data_payload_bytes);}if (data_bytes == 0) {// Data fits into entrymemcpy(entry->data.value, data,data_payload_bytes);}entry->count = data_count;if (updated_entry != NULL) {get_camera_metadata_entry(dst,index,updated_entry);}assert(validate_camera_metadata_structure(dst, NULL) == OK);return OK;
}
tag分类
tag从归属方可以被分类两类:(1) android平台原生tag。如ANDROID_CONTROL_AE_MODE用于控制AE曝光方式(auto、manual等)。 (2) vendor tag(platfrom如Qcom/SumSung/MTK新增tag)。
android tag
tag是通过section的方式来进行分类的,如下:
typedef enum camera_metadata_section {ANDROID_COLOR_CORRECTION,ANDROID_CONTROL,ANDROID_DEMOSAIC,ANDROID_EDGE,ANDROID_FLASH,ANDROID_FLASH_INFO,ANDROID_HOT_PIXEL,ANDROID_JPEG,ANDROID_LENS,ANDROID_LENS_INFO,ANDROID_NOISE_REDUCTION,ANDROID_QUIRKS,ANDROID_REQUEST,ANDROID_SCALER,ANDROID_SENSOR,ANDROID_SENSOR_INFO,ANDROID_SHADING,ANDROID_STATISTICS,ANDROID_STATISTICS_INFO,ANDROID_TONEMAP,ANDROID_LED,ANDROID_INFO,ANDROID_BLACK_LEVEL,ANDROID_SYNC,ANDROID_REPROCESS,ANDROID_DEPTH,ANDROID_LOGICAL_MULTI_CAMERA,ANDROID_DISTORTION_CORRECTION,ANDROID_HEIC,ANDROID_HEIC_INFO,ANDROID_SECTION_COUNT,VENDOR_SECTION = 0x8000
} camera_metadata_section_t;
上面都是android原生tag的section,每一个section支持的tag总数最大是65536(1<<16)。
vendor tag
vendor tag必须从0x8000000开始使用 。
tag 命名
从上文可以了解到,tag实际上是一个UINT32的key值。如果在coding的时候,总是使用一个UINT32类型的数字是描述tag,是一件非常难以容忍的事情。
实际上tag是有char型的名字的,平时使用的时候,对于android原生tag,既可以使用char型的名字来获取tag,也可以直接使用宏。但是对于平台定义的vendor tag,基本山都是使用tag name的方式来读写tag。
system/media/camera/src/camera_metadata_tag_info.c 定义了android原生tag name和type。
hardware/libhardware/modules/camera/CameraHAL.cpp 有一个deamon,描述如何在HAL实现vendor tag。这里不再赘述。