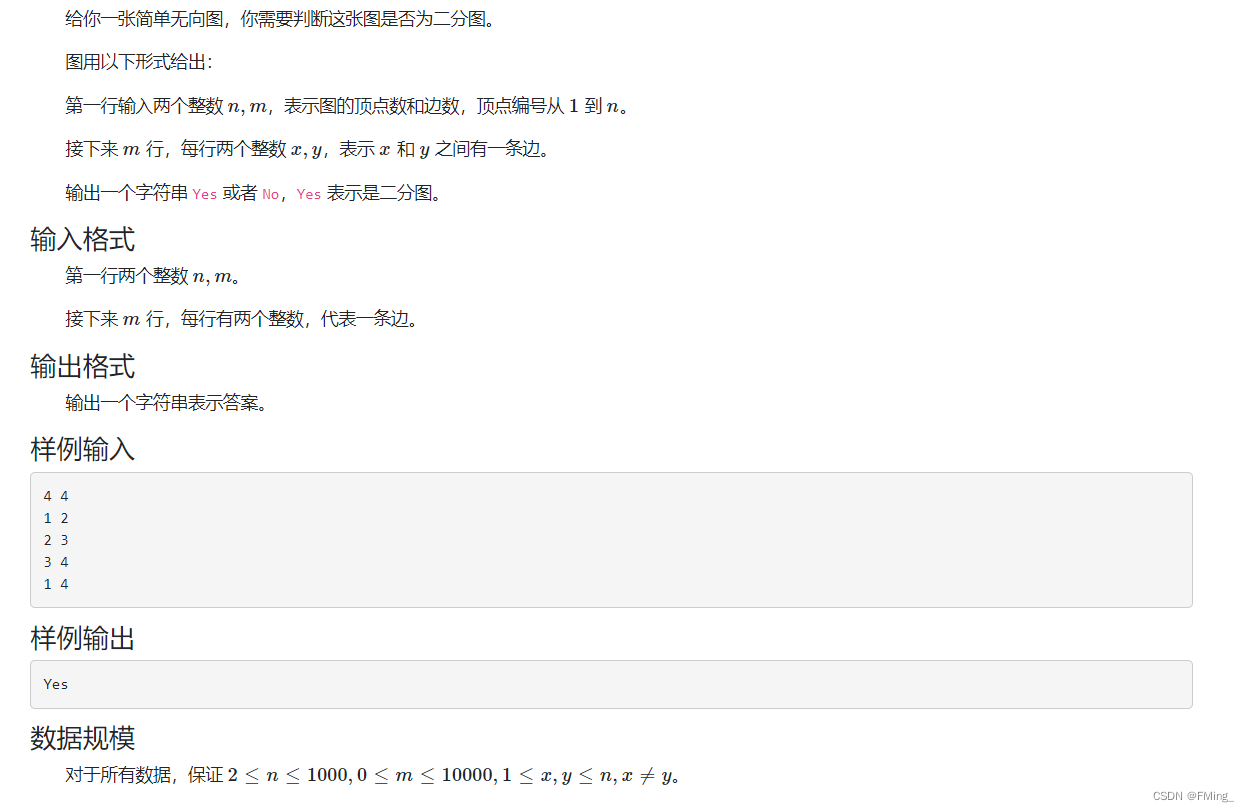
0x00 二分图
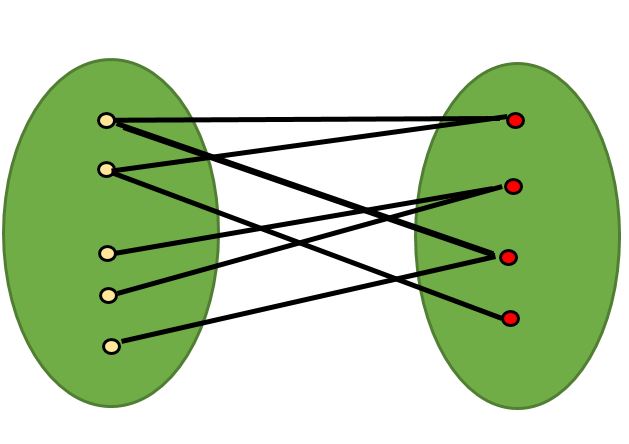
二分图是一个图,它的顶点可以分为两个独立的集合u和v,这样每一条边(u,v)要么从u到v连接一个顶点,要么从v到u连接一个顶点。换句话说,对于每一条边(u,v),要么u属于u,要么v属于v,或者u属于v,v属于u,也可以说没有边连接同一集合的不同点。
0x01 二分图的判定
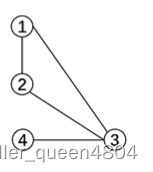
可以通过染色法判定二分图。如果可以通过两种颜色将图染色,使得相同集合中的顶点使用相同的颜色,则为二分图。请注意,仅可以使用两种颜色为偶数顶点个数的图染色。例如,请参见下图。
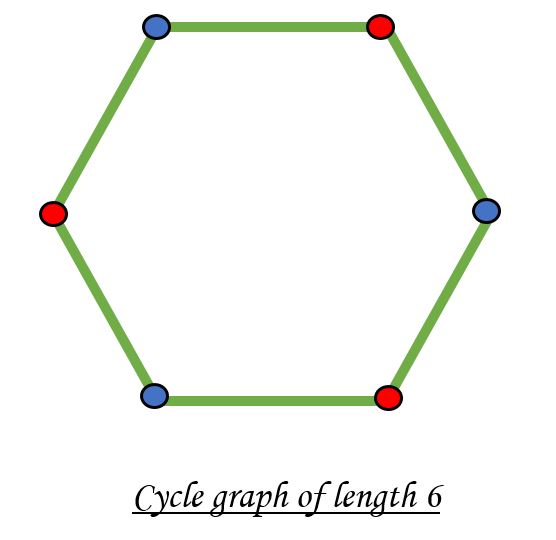
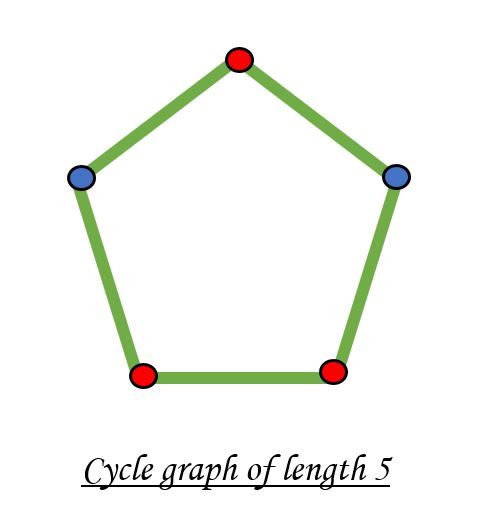
无法使用两种颜色为奇数顶点个数的图染色。
二分图的判定算法主要通过bfs和dfs。首先通过bfs来确定给定的图是否是二分图。
- 初始点染成红色(放置到集合
U中)。 - 用蓝色给所有邻居涂上颜色(放入第
V组)。 - 用红色给所有邻居的邻居涂上颜色(放入
U组)。 - 这样,将颜色分配给所有顶点,使其满足
m路着色问题中m=2的所有约束。 - 分配颜色时,如果发现一个邻居的颜色与当前顶点的颜色相同,则该图不是二分图。
class Graph(): def __init__(self, V): self.V = V self.graph = [[0]*V for _ in range(V)] self.colorArr = [-1]*self.V def isBipartiteUtil(self, src): queue = [] queue.append(src) while queue: u = queue.pop() if self.graph[u][u] == 1: return Falsefor v in range(self.V): if self.graph[u][v] == 1 and self.colorArr[v] == -1: self.colorArr[v] = 1 - self.colorArr[u] queue.append(v) elif self.graph[u][v] == 1 and self.colorArr[v] == self.colorArr[u]: return Falsereturn Truedef isBipartite(self): self.colorArr = [-1]*self.V for i in range(self.V): if self.colorArr[i] == -1: if not self.isBipartiteUtil(i): return Falsereturn Trueg = Graph(4)
g.graph = [[0, 1, 0, 1], [1, 0, 1, 0], [0, 1, 0, 1], [1, 0, 1, 0]] print "Yes" if g.isBipartite() else "No"
也可以使用dfs来做。
V = 4
def colorGraph(G, color, pos, c): color[pos] = c for i in range(0, V): if G[pos][i]: if color[i] == -1: if not colorGraph(G, color, i, 1-c):return Falseelif color[i] == c: return False return True def isBipartite(G): self.colorArr = [-1]*self.V for i in range(self.V): if self.colorArr[i] == -1: if not colorGraph(G, color, pos, 1): return Falsereturn Trueif __name__ == "__main__": G = [[0, 1, 0, 1], [1, 0, 1, 0], [0, 1, 0, 1], [1, 0, 1, 0]] if isBipartite(G): print("Yes") else: print("No")
上述代码中的图的表示是通过邻接矩阵存储的,当然可以通过数组模拟邻接表来处理。关于数组模拟邻接表的知识数组模拟邻接表(超详细!!!)
int n; // n表示点数
int h[N], e[M], ne[M], idx; // 邻接表存储图
int color[N]; // 表示每个点的颜色,-1表示为染色,0表示白色,1表示黑色// 参数:u表示当前节点,father表示当前节点的父节点(防止向树根遍历),c表示当前点的颜色
bool dfs(int u, int father, int c)
{color[u] = c;for (int i = h[u]; ~i; i = ne[i]){int j = e[i];if (color[j] == -1){if (!dfs(j, u, !c)) return false;}else if (color[j] == c) return false;}return true;
}bool check()
{memset(color, -1, sizeof color);bool flag = true;for (int i = 0; i < n; i ++ ){if (color[i] == -1){if (!dfs(i, -1, 0)) return false;}}return true;
}
0x02 二分图的最大匹配
二分图中的匹配是一组边的选择方式,使得一个端点不会对应两条边。最大匹配是最大边数的匹配。在最大匹配中,如果添加了任何边,则不再是匹配。给定的二部图可以有多个最大匹配。
这有什么用?
现实世界中有许多问题可以作为二分匹配来解决。例如,考虑以下问题:
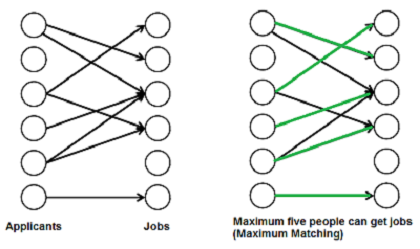
有m个职位申请者和n个职位。每个申请人都有他/她感兴趣的工作子集。每个职位空缺只能接受一个应聘者,一个职位应聘者只能被指定一个职位。找一份工作分配给申请者,以便尽可能多的申请者得到工作。
二分图的最大匹配问题实际上可以转化为最大流问题。
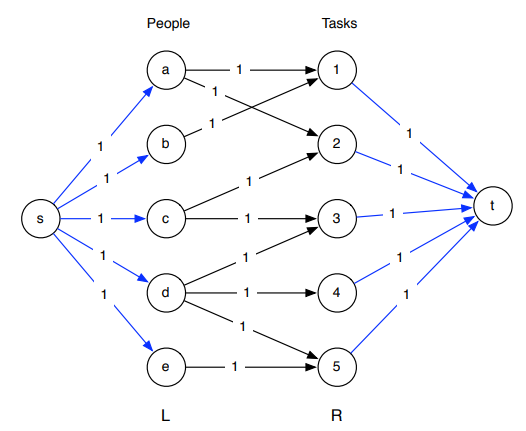
对于二分图来说,每条边的容量相当于0或1,所以我们可以将算法简化。任取一个匹配 M M M(可以使用空集或一条边),令 S S S是非饱和点(尚未匹配的点)的集合。
- 如果 S S S是空集,则 M M M已经是最大匹配了。
- 从 S S S中取出一个非饱和点 u 0 u_0 u0作为起点,从此起点走交错路(交替属于 M M M和非 M M M的边构成的极大无重复点通路或回路) P P P
- 如果 P P P是一个增广路径( P P P的终点也是非饱和点),则令 M = ( M − P ) ∪ ( P − M ) M=(M-P)\cup (P-M) M=(M−P)∪(P−M)
- 如果 P P P不是增广路径,则从 S S S中去掉 u 0 u_0 u0,然后继续递归。
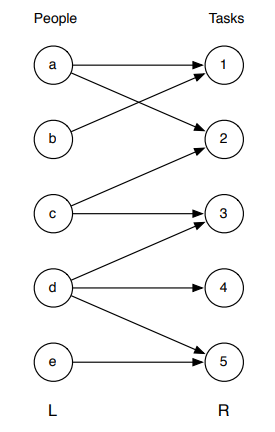
首先解释一下增广路径,这里的增广路径和最大流中有一些区别。从一个未匹配点出发,走交替路,如果途径另一个未匹配点(出发的点不算),则这条交替路称为增广路径。例如,左图的一条增广路如右图所示(图中的匹配点均用红色标出):
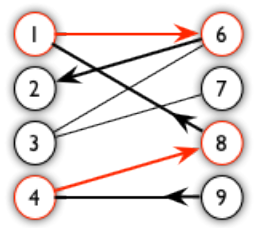

增广路径有一个重要特点:非匹配边比匹配边多一条。因此,研究增广路径的意义是改进匹配。只要把增广路径中的匹配边和非匹配边交换即可。由于中间的匹配节点不存在其他相连的匹配边,所以这样做不会破坏匹配的性质。交换后,图中的匹配边数目比原来多了1条。
int n; // n表示点数
int h[N], e[M], ne[M], idx; // 邻接表存储所有边
int match[N]; // 存储每个点当前匹配的点
bool st[N]; // 表示每个点是否已经被遍历过bool find(int x) //判断增广路径
{for (int i = h[x]; ~i; i = ne[i]){int j = e[i];if (!st[j]){st[j] = true;if (match[j] == 0 || find(match[j])){match[j] = x;return true;}}}return false;
}// 求最大匹配数
int res = 0;
for (int i = 0; i < n; i ++ )
{memset(st, false, sizeof st);if (find(i)) res ++ ;
}
上面这个算法就是匈牙利算法,通过dfs判断增广路径和之前最大流问题中的bfs判断最大路径区别。
reference:
https://www.geeksforgeeks.org/bipartite-graph/
https://www.acwing.com/blog/content/405/
https://www.geeksforgeeks.org/maximum-bipartite-matching/
https://www.cs.cmu.edu/~ckingsf/bioinfo-lectures/matching.pdf
https://blog.csdn.net/qq_40061421/article/details/82751020