ROS发展史
2007年诞生于斯坦福大学
2010年正式开源,1.0发布
ROS到底是什么
ROS = 通信机制+开发工具+应用功能+生态系统
目标就是提高机器人研发中的软件复用率,减少重复造轮子
例如我们基本不用写很多代码,就可以很快实现一个导航功能,一个图像识别功能,一个SLAM功能等等
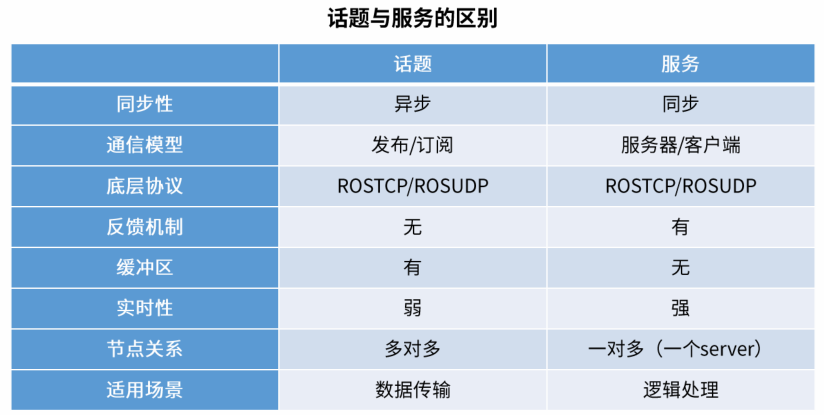
ROS中的通信机制
ROS中的核心通信机制就是一个计算图(Computational Graph)
计算图
ROS中的开发工具
ROS中的应用功能
ROS中的生态系统
ROS社区内的功能包数量、关注度、相关文章均呈指数级上涨
现在应该中国的开发者是排世界第一的