PX4 传感器配置
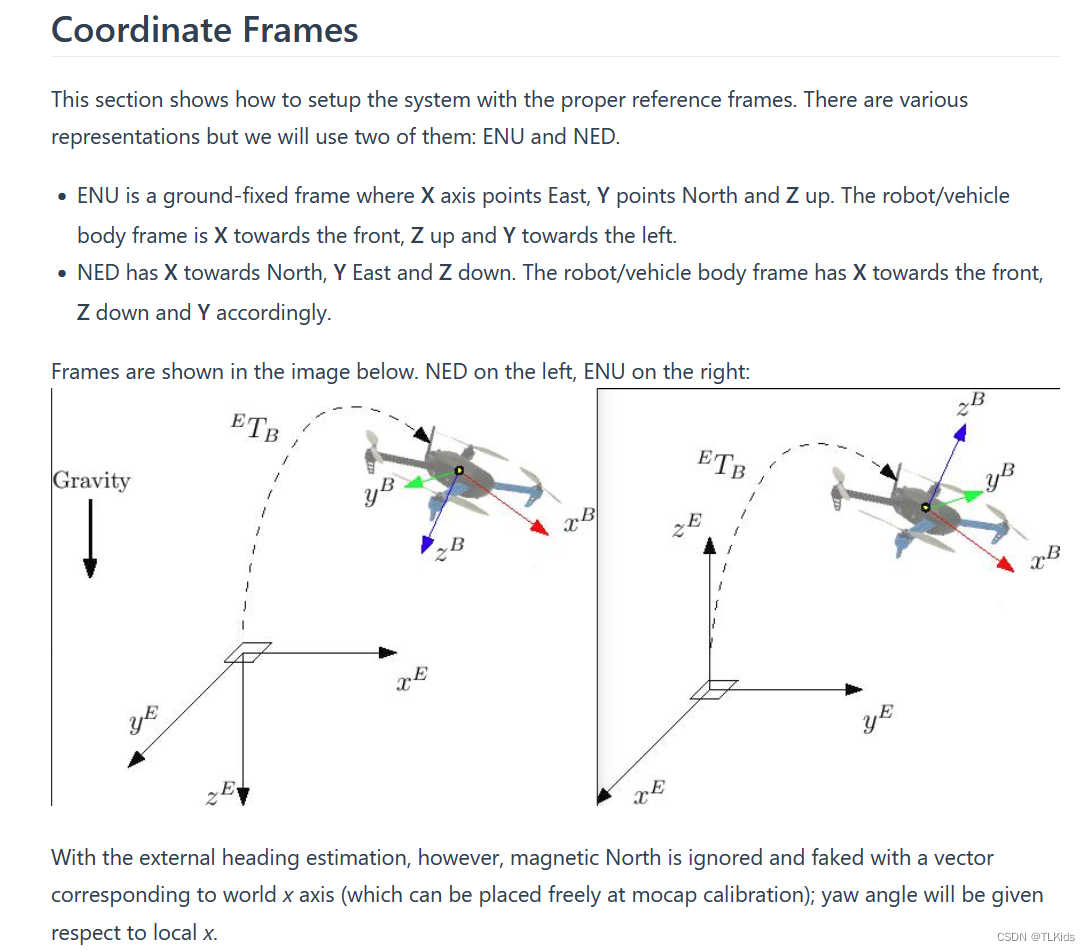
##坐标系定义
旋转变化
reference
在机器人中各个坐标系之间的变换是非常常见的,而在ROS tf 工具中,以及Eigen 中 我们常常会见到RPY的旋转表示和四元数的旋转表示。当然学航空出生的我们可能更常见的是Euler描述。那么这三者的关系我们就必须说清楚的。
首先,三种表达方式显然都是描述同一个旋转。在不加说明的情况下,我们所描述的都是从机体坐标系( b 系 )到参考坐标系( i 系 )的旋转,即: X i = R X b X_i=RX_b Xi=RXb
Euler的描述顺序: 依次绕机体系的 Z–>Y–>X的旋转,即动系旋转, 应该采用右乘法:
R = R Z R Y R X R=R_Z R_Y R_X R=RZRYRX
的 X–>Y—>Z ,即定系旋转,应采用左乘法:
R = R Z R Y R X R=R_ZR_YR_X R=RZRYRX
: standard Holybro Pixhawk 4 or CUAV V5 GPS/compass puck (with lights, safety button, and buzzer)
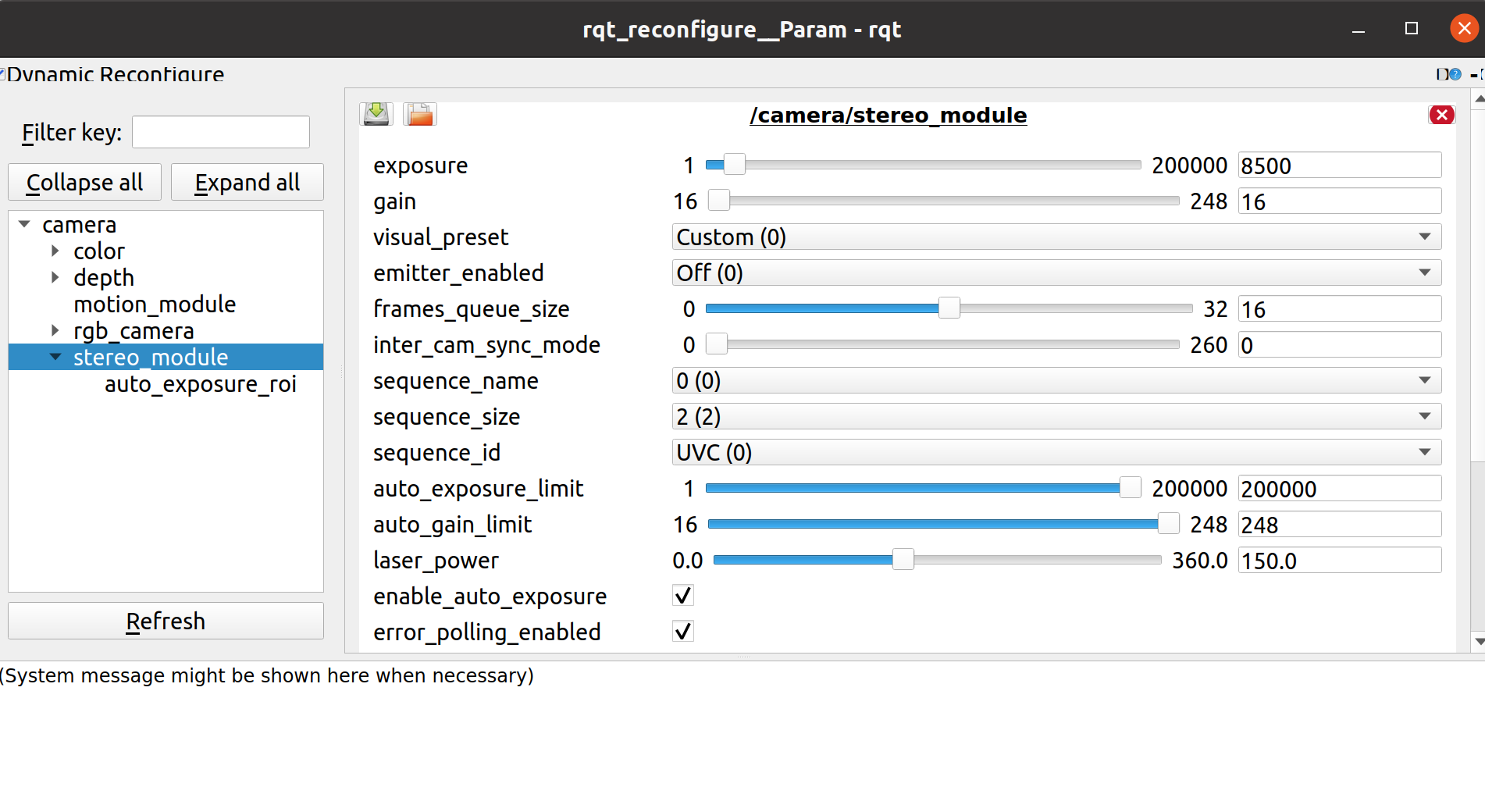
ist8310 -X -b 1 -R 10 start在配置中其他参数的具体作用,可以查看PX4开发者手册,也可以在nsh中输入icm20649(具体的驱动模块名) help:
icm20649 <command> [arguments...]Commands:start[-s] Internal SPI bus(es)[-S] External SPI bus(es)[-b <val>] board-specific bus (default=all) (external SPI: n-th bus(default=1))[-c <val>] chip-select index (for external SPI)default: 1[-m <val>] SPI mode[-f <val>] bus frequency in kHz[-q] quiet startup (no message if no device found)[-R <val>] Rotationdefault: 0stopstatus print status info
这里,主要再说明一下R参数的作用。正如help功能所输出的结果,R表示的是传感器到机体坐标系(NED)的一个旋转关系,具体参数在rotation.h中定义:
这里采用了RPY的描述,它的具体定义和飞机常用欧拉角的关系,我在上一章旋转变化作了说明
enum Rotation : uint8_t {ROTATION_NONE = 0,ROTATION_YAW_45 = 1,ROTATION_YAW_90 = 2,ROTATION_YAW_135 = 3,ROTATION_YAW_180 = 4,ROTATION_YAW_225 = 5,ROTATION_YAW_270 = 6,ROTATION_YAW_315 = 7,ROTATION_ROLL_180 = 8,ROTATION_ROLL_180_YAW_45 = 9,ROTATION_ROLL_180_YAW_90 = 10,ROTATION_ROLL_180_YAW_135 = 11,ROTATION_PITCH_180 = 12,ROTATION_ROLL_180_YAW_225 = 13,ROTATION_ROLL_180_YAW_270 = 14,ROTATION_ROLL_180_YAW_315 = 15,ROTATION_ROLL_90 = 16,ROTATION_ROLL_90_YAW_45 = 17,ROTATION_ROLL_90_YAW_90 = 18,ROTATION_ROLL_90_YAW_135 = 19,ROTATION_ROLL_270 = 20,ROTATION_ROLL_270_YAW_45 = 21,ROTATION_ROLL_270_YAW_90 = 22,ROTATION_ROLL_270_YAW_135 = 23,ROTATION_PITCH_90 = 24,ROTATION_PITCH_270 = 25,ROTATION_PITCH_180_YAW_90 = 26,ROTATION_PITCH_180_YAW_270 = 27,ROTATION_ROLL_90_PITCH_90 = 28,ROTATION_ROLL_180_PITCH_90 = 29,ROTATION_ROLL_270_PITCH_90 = 30,ROTATION_ROLL_90_PITCH_180 = 31,ROTATION_ROLL_270_PITCH_180 = 32,ROTATION_ROLL_90_PITCH_270 = 33,ROTATION_ROLL_180_PITCH_270 = 34,ROTATION_ROLL_270_PITCH_270 = 35,ROTATION_ROLL_90_PITCH_180_YAW_90 = 36,ROTATION_ROLL_90_YAW_270 = 37,ROTATION_ROLL_90_PITCH_68_YAW_293 = 38,ROTATION_PITCH_315 = 39,ROTATION_ROLL_90_PITCH_315 = 40,ROTATION_MAX
};
不过需要注意的一点是,这里的旋转关系有一点复杂。之前已经说了,这个旋转代表的是传感器坐标系到机体坐标系的旋转。那么机体坐标NED已经确定了,那么传感器坐标系呢?这里分为两种情况:
- 传感器出厂坐标系为右手系的
大部分imu和mag本身都是右手系的,这里我收集了一些常用传感器的datasheet定义图:
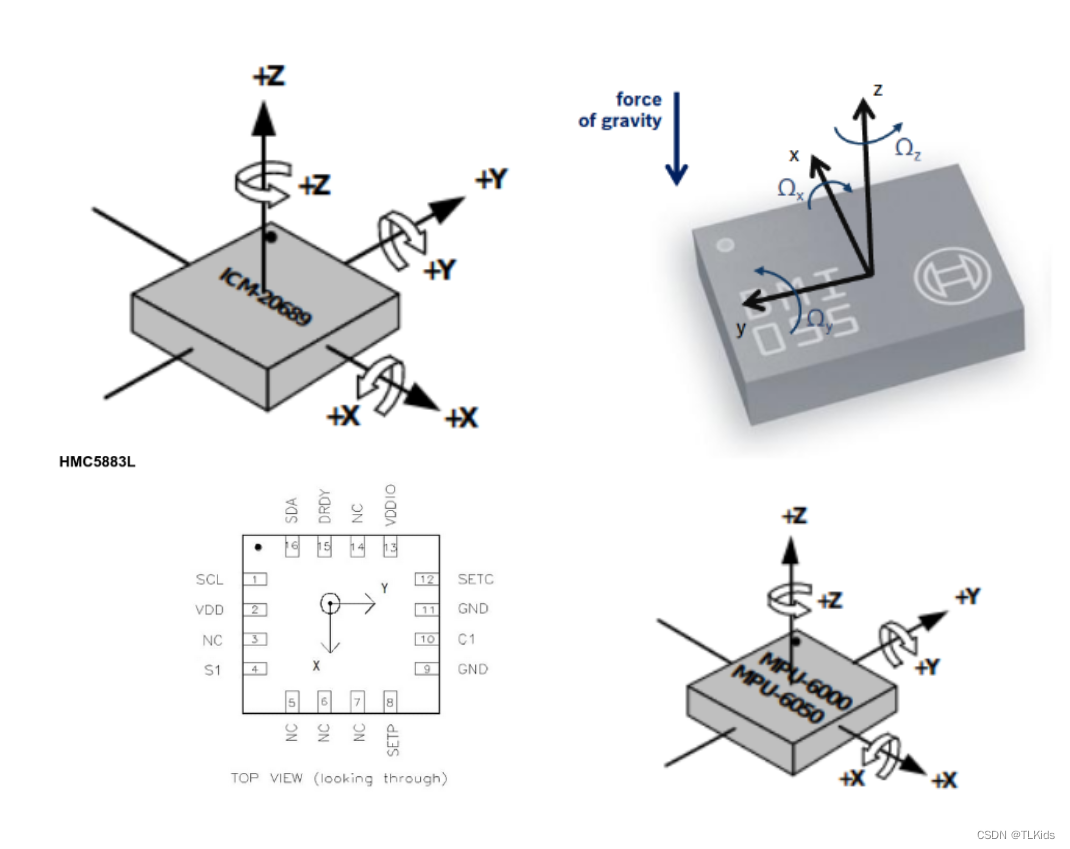
这一类传感器在硬件设计时,期望将他们厂家定义的坐标系与机体的ENU相重合。这样的话,在传感器启动参数中 R 就为默认值0,也就是ROTATION_NONE 。这里,你肯定会疑惑道?难道不该是和之前说的机体坐标系NED重合么?你说的很对,确实应该如此。但是PX4在相应驱动中做了如下处理:
// sensor's frame is +x forward, +y left, +z up// flip y & z to publish right handed with z down (x forward, y right, z down)gyro.x[i] = gyro_x;gyro.y[i] = (gyro_y == INT16_MIN) ? INT16_MAX : -gyro_y;gyro.z[i] = (gyro_z == INT16_MIN) ? INT16_MAX : -gyro_z;
经过这样对 y, z轴的反转,最终传感器的测量值和机体坐标系NED一致了。这样做其实是很合理的,因为大多数imu和mag是布置在飞控的top,而不会把它们翻过来焊接在bottom。
那么当imu或者mag由于布线需要不是那样焊接的呢?那么这时请按上面的处理,把imu的出厂坐标系通过 y, z 翻转变为相似的NED坐标系。这个翻转后的传感器坐标系到机体坐标系的旋转就是我们要输入R。
- 传感器出厂坐标系为左手系的
这听起来很奇怪,居然有传感器坐标系是左手的。但是我们常用的ist8310还真就是这样的:
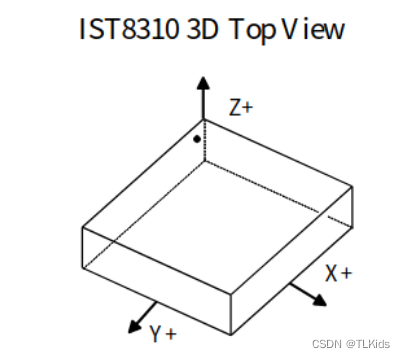
首先,PX4在驱动中进行了如下处理:
// sensor's frame is +x forward, +y right, +z upz = (z == INT16_MIN) ? INT16_MAX : -z; // flip z
好了,看到这里结合前面的讲解,我想你肯定懂了?没错,就是把它出厂坐标系的z轴进行翻转,然后就得到了一个NED的坐标系。这个坐标系到机体坐标系的旋转就是我们要输入的R。
总结: 基于上述传感器配置的描述,我们就可以自己随意安排传感器在飞控板上的布置了!