恰饭一下:
已经过了工作的年纪,在这里稍微出一下自己做的一套永磁同步电机的教程,
为了解决电机控制入门难的问题,我将自己从一知半解到现在的学习记录整理成十个部分学习教程,从基础的矢量控制,到应用性较强的MTPA、弱磁控制等,最后深入到无速度传感器的控制,足够大家从基础到深入整个过程的学习。每个部分以精心制作的Simulink电机控制仿真模型为核心,配以辅助理解文档方便大家进行学习,尽可能详细对过程中很小但容易卡住的问题进行解释。每个部分资料全都基于一个电机参数,是一个系统的学习教程 ,我有信心大家拿到这份教程,认真学习,一定能够走进电机控制的大门,并且掌握它。 联系方式在文章末尾,加好友就有福利哦~欢迎Q我
永磁同步电机矢量控制到无速度传感器控制学习教程(PMSM)
1 永磁同步电机MTPA的控制原理
1.1 MTPA控制方式与id=0控制方式的区别
当电机采用id=0的控制策略,但是这种控制方法忽略和磁阻转矩的作用

这个从转矩方程最容易看出来,转矩分为永磁转矩Tr和磁阻转矩Tm,而id=0只剩下Tr。这会导致电流的利用率不高,系统的效率降低。所以id=0的控制比较适用于隐极式电机(Ld=Lq),而对于凸极式电机并不最优,所以需要重新考虑控制策略。
1.2 推导过程
为了找到电流和转矩的最佳匹配,使电机能最小的电流产生最大的转矩,这就是数学上的事情了。
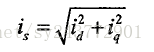
列下以下公式,转矩电流之间的关系式
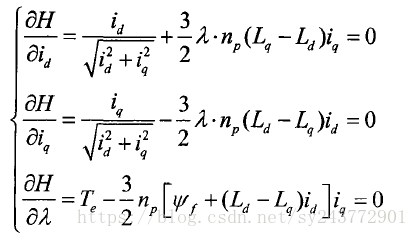
为了找到极值关系,利用数学中的拉格朗日定理,引入辅助函数。

接着开始拉格朗日求极值的过程,
对上式进行求解,得到了直轴电流id和交轴电流iq的关系,
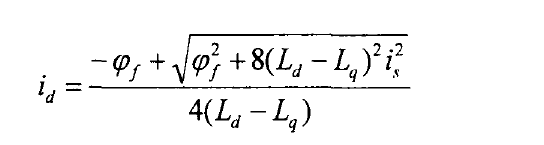
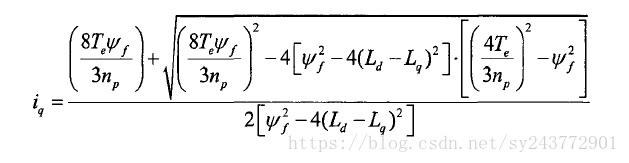
其实到了这里我们还是一个蒙蔽状态,因为这个公式没法用啊,我们矢量控制的转速环输出的是转矩给定Te,而且这个公式里面用iq来求id,我本来就不知道iq我还咋求id啊,仿真没法搭,好多的论文里面就到了这里就没有了,最后在一篇弱磁的论文里面才找到了最后可用的计算公式。

以上公式就是用转速环的输出来计算,来算出给定转矩所对应最低的id和iq,反映到电机上就是定子电流。
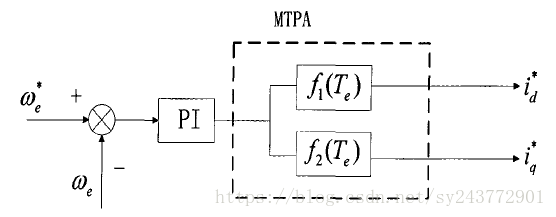
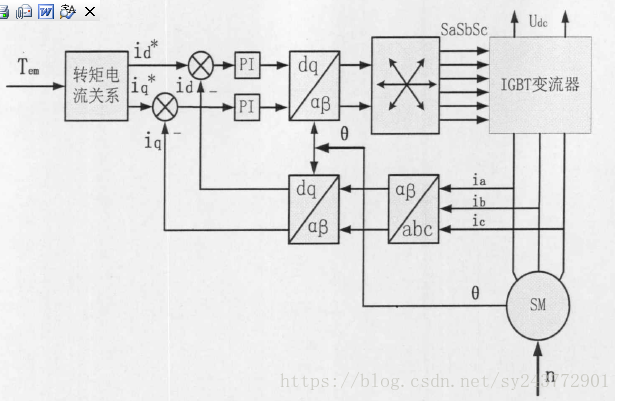
1.3 控制框图以及仿真搭建
从转速环输出部分框图
整体控制框图:
2 仿真结果分析
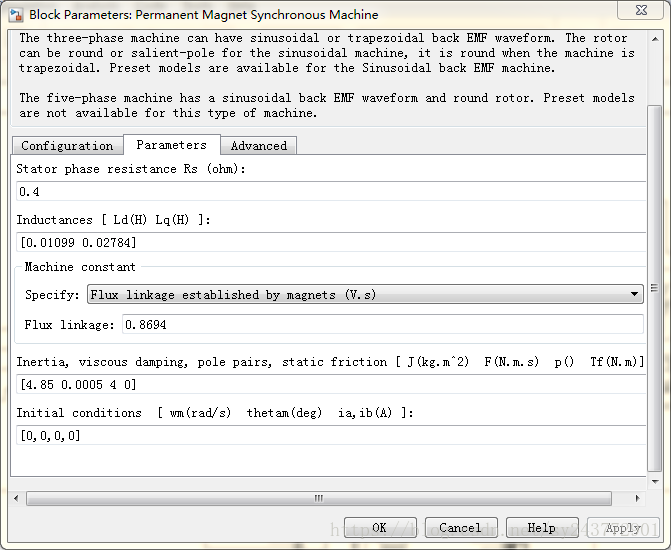
2.1 电机参数
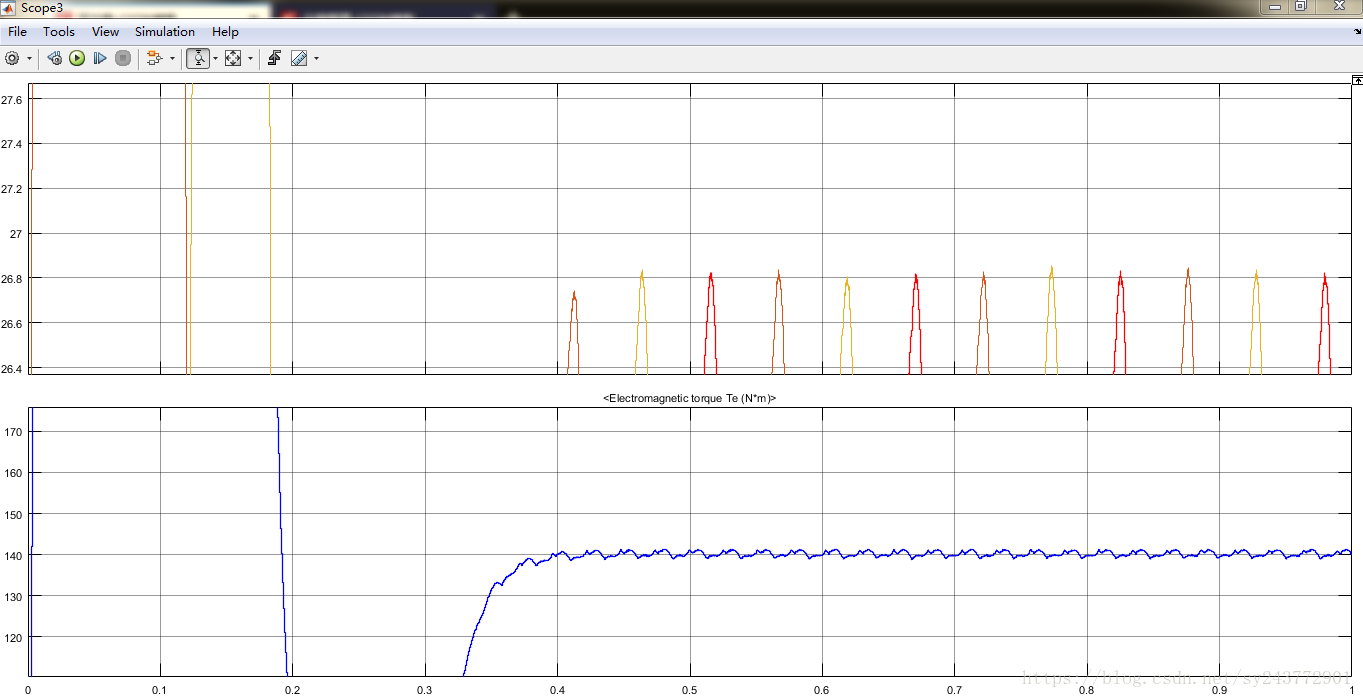
2.2 id=0 的转矩和定子电流结果
id=0 带140N负载,转矩与定子电流波形。
放大结果
如图可以看出,id=0控制方式下,在140N负载时,定子电流在26.8A。
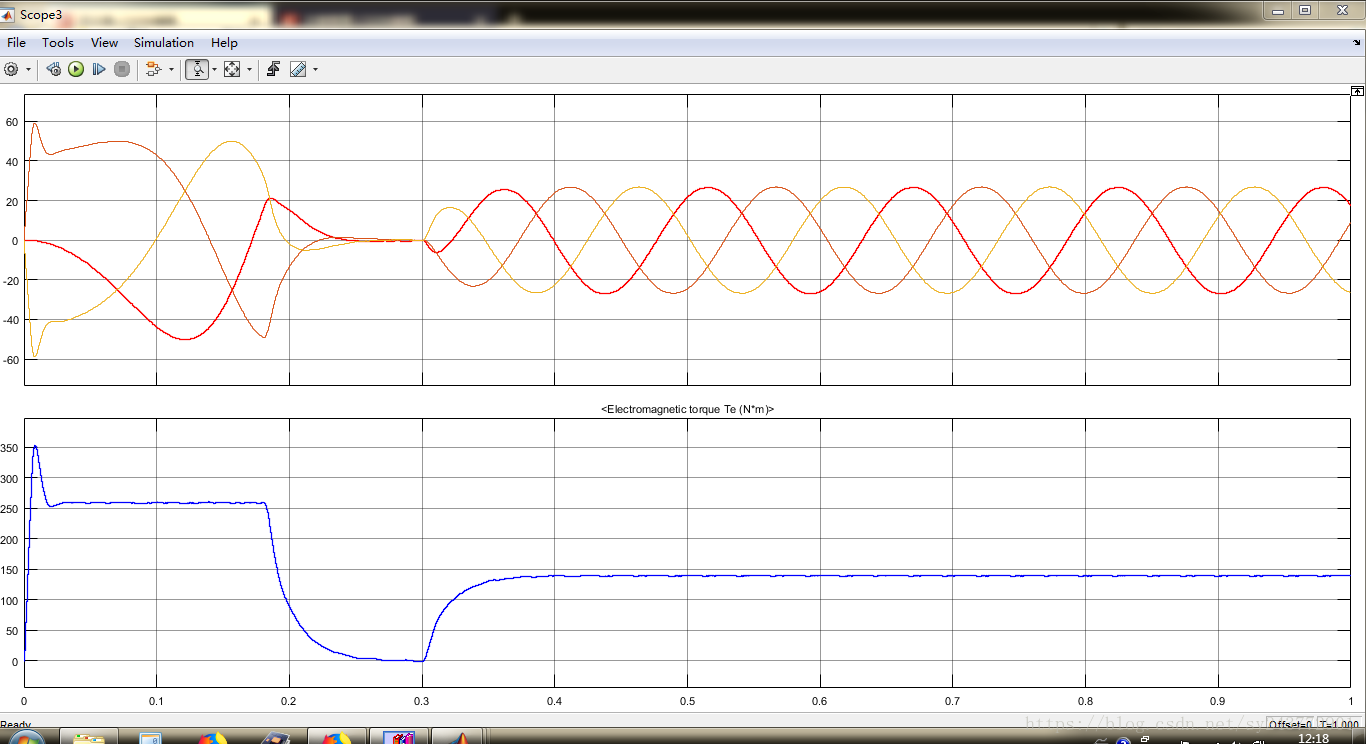
2.3 MTPA 的转矩和定子电流结果
MTPA 带140N负载,转矩与定子电流波形。
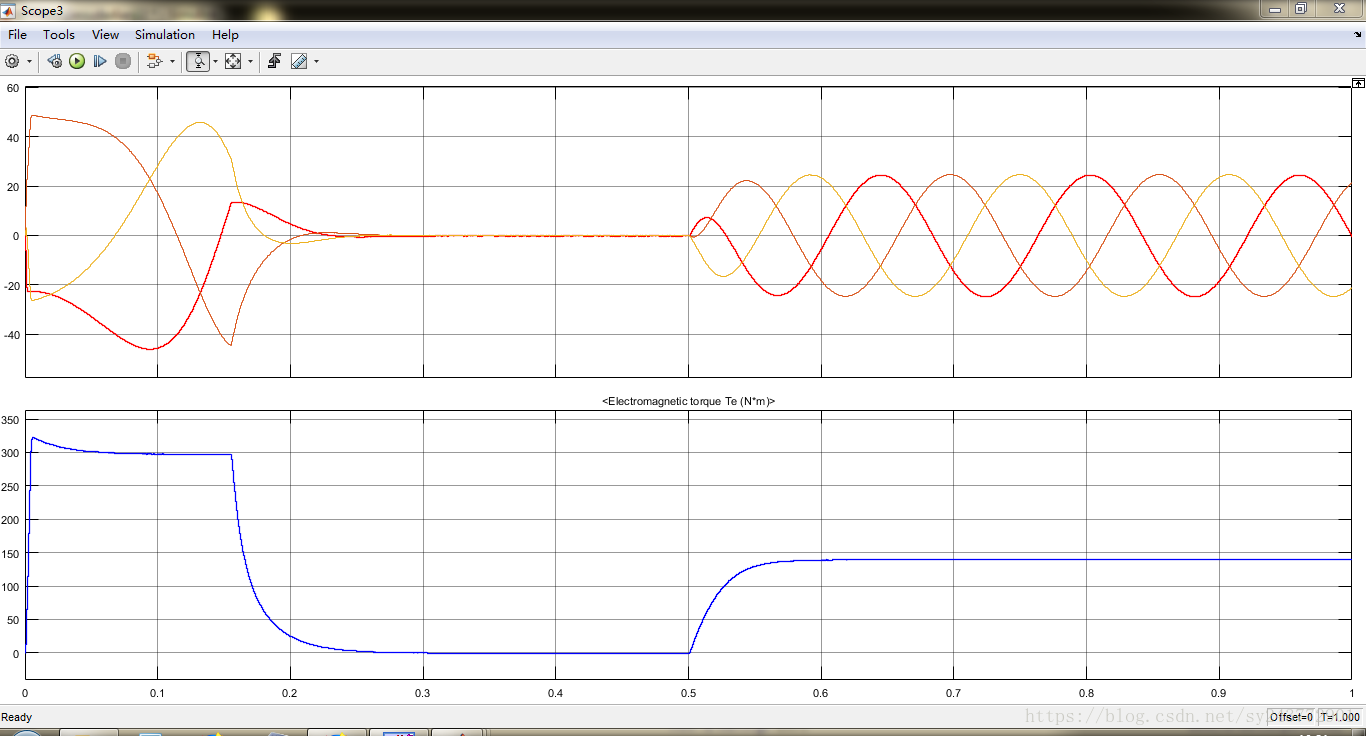
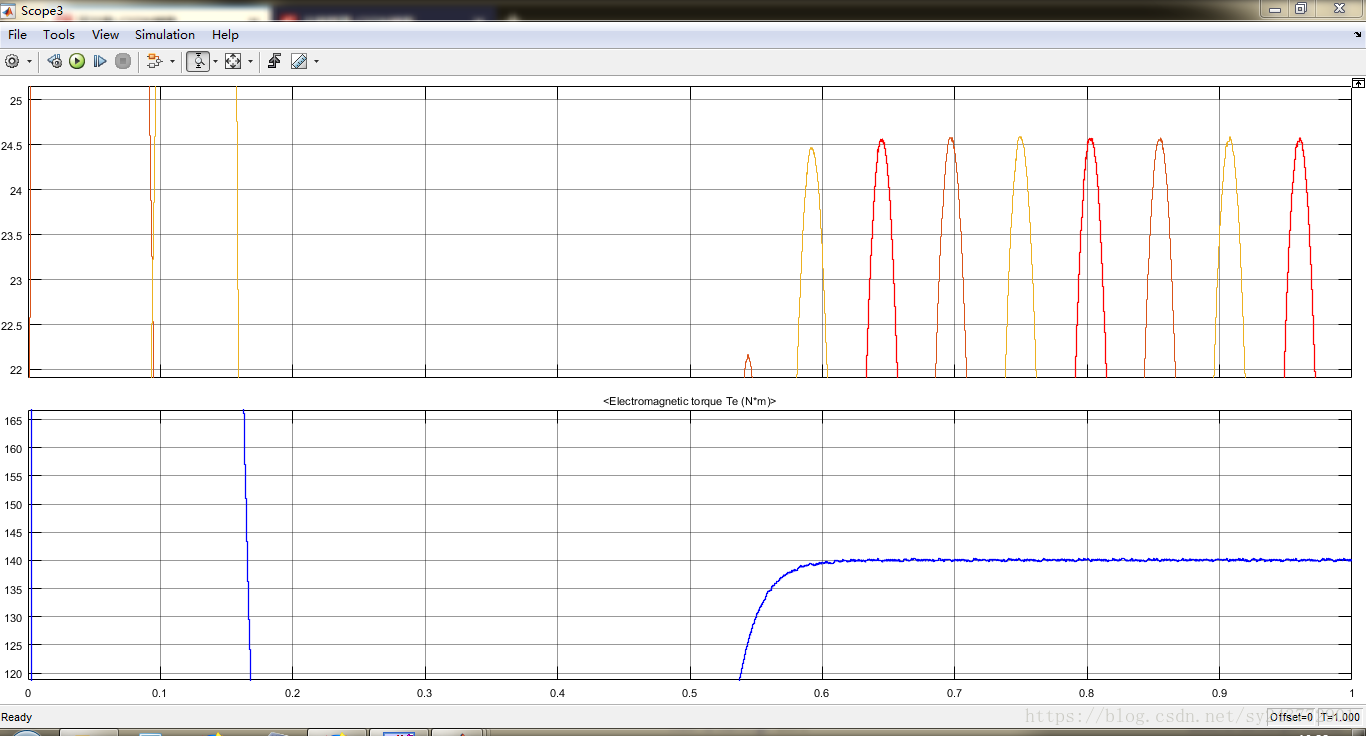
如图可以看出,最大转矩电流比控制方式下,在 140N 负载时,定子电流在24.5A。交轴电流为 iq = 22.94 A,直轴电流为 id = -8.75 A。
3 小结
从控制方式角度将,最大转矩电流比是凸极电机在矢量控制上的一种优化,提高逆变器电压的利用率,减少损耗,提高电机的效率。
从数学上来讲,最大转矩电流比根据电流和转矩方程求最值。
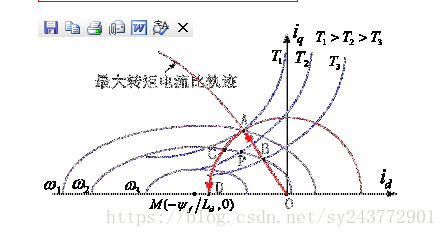
反映在图上就是在最大转矩曲线上,我们的 id 和 iq 就是在这条曲线上取得。
从应用角度讲,最大转矩电流比充分利用了凸极电机的磁阻转矩,降低损耗提高效率,降低了成本,而且在更为永磁同步电机弱磁控制提供了更好的基础。
存在的部分问题,
1、电机的参数在电机运行时会随电机的温度以及转速产生波动,这将影响MTPA的精确程度。
2、在电机交直轴电感差值(Ld-Lq)较小时,磁阻转矩较小,MTPA的改善效果不明显。
3、因为计算公式复杂,会给控制模块带来很大的负担,所以一般在实际工程应用中,会用到查表法,即先将对应转矩的 iq 和 id 计算出来。另外拟合法也是非常不错的方法。
需要文章资料与仿真模型的同学请博客私信我,请勿评论留下个人信息,避免信息外泄,私信看到就会发过去。
文章中的参考论文:
MTPA 论文+部分公式截图
整理不易,希望大家帮忙点个赞呀,谢谢啦~_
系列文章链接:
永磁同步电机矢量控制到无速度传感器控制学习教程(PMSM)
永磁同步电机矢量控制(一)——数学模型
永磁同步电机矢量控制(二)——控制原理与坐标变换推导
永磁同步电机矢量控制(三)——电流环转速环 PI 参数整定
永磁同步电机矢量控制(四)——simulink仿真搭建
永磁同步电机矢量控制(五)——波形记录及其分析
永磁同步电机矢量控制(七)——基于id=0的矢量控制的动态解耦策略
永磁同步电机矢量控制(八)——弱磁控制(超前角弱磁)
永磁同步电机矢量控制(九)——三闭环位置控制系统
永磁同步电机矢量控制(十)——PMSM最优效率(最小损耗)控制策略