首先汽车七自由度模型包括车身的横摆,纵向和侧向,以及四个车轮的转动。
这里主要用到了车身坐标系x-y;和大地坐标系X-Y。
一、首先计算在车身坐标系下,汽车的纵向和侧向的加速度:
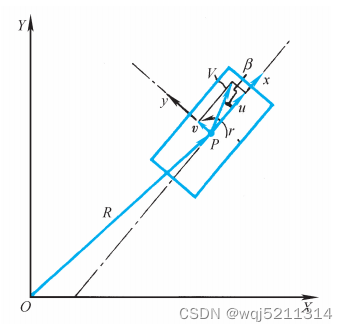
图1. 汽车运动时车身坐标系和大地坐标系的关系
这里的汽车的纵向速度为u,侧向速度为v
(1)
两边求导可得
(2)
这里主要解决,
就可以求出纵向和侧向的加速度了;
方法1:
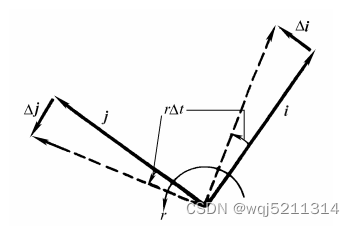
图2. 车身坐标系的变化
这里的变化可以看成在一个微小时间段的变化:可以得出
(3)
(3)两边同时除以在求极限可以得出
(4)
带入(2)中整理可得
(5)
方法2、
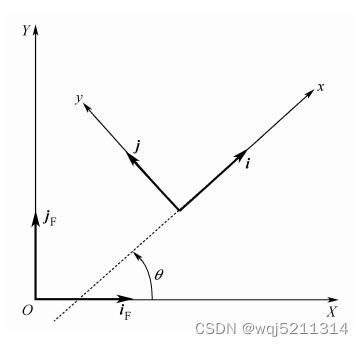
图3.车身坐标系和大地坐标系的相对位置
其中为车辆横摆角,r为横摆角速度
有上图可以得出坐标转换公式为
(6)
对了(6)两边求导后可得到(4),之后即可得到(5)
二、整车模型公式
1.车身纵向、横向和横摆的平衡方程
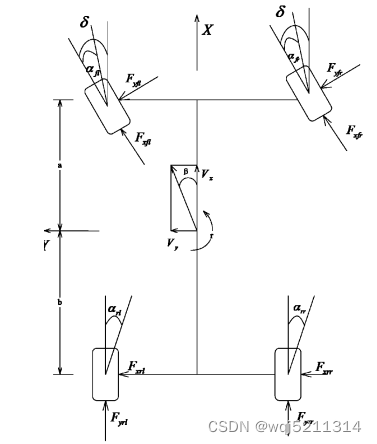
图4.汽车简化模型
纵向力平衡:
侧向力平衡:
绕Z轴转矩平衡:
其中为整车绕Z轴的转动惯量,a为汽车的前轴距,b为汽车的后轴距,
为前轮距,
为后轮距,
为方向盘转角,
为轮胎受力(i=x,y,z分别表示纵向,侧向力,垂向力;j=f,r表示前后,k=l,r表示左右)。
2.垂直载荷的计算
垂直载荷由三部分组成,静载荷和动载荷(前后载荷转移和左右载荷转移)
3.各个轮胎侧偏角的计算:
这里的计算推到过程:假设车辆是刚体,轮胎速度包括车身的速度和轮胎绕质心旋转的速度,可以得出前左轮的纵向速度为,侧向速度为
,而 车辆实际运动方向为
,通过公式变换即可得到
,其他同理可得。
4.各个车轮轮心的纵向速度:
5.轮胎滑移率的计算:
最后是魔术轮胎的建模,这里我单独发了一篇写魔术轮胎
三、整车模型模块化输入输出
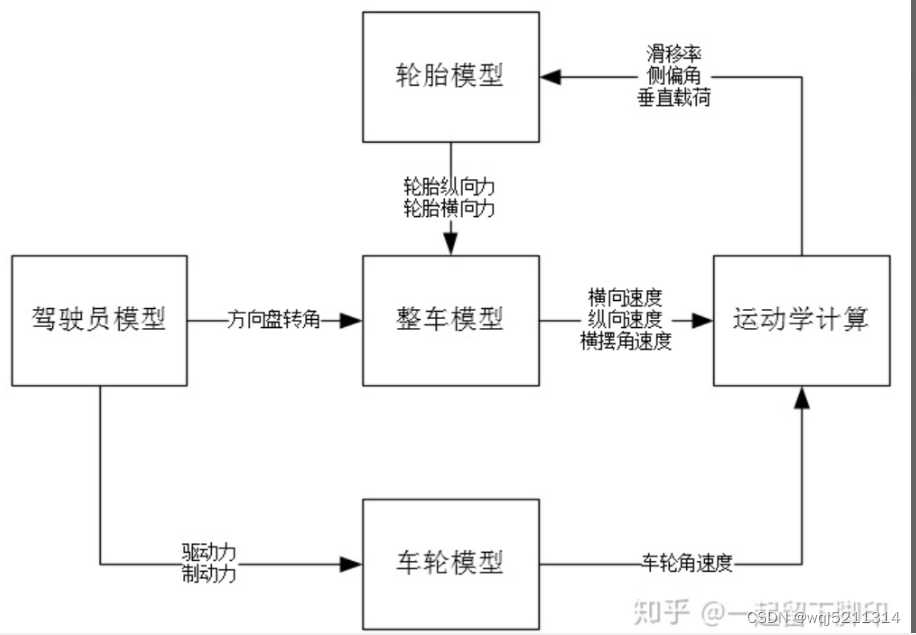
图5.各变量输入输出关系
整车模型的构建按照上述公式在simulink中搭建好模块后进行输入输出的连接即可。
四、结果说明
这里的车辆工况是在1s后方向盘瞬间转角80度,车辆以50km\h的速度行驶。
一个七自由度模型输出结果包括:方向盘转角,横摆角速度,质心侧偏角,侧向加速度,四轮轮胎侧偏角,行驶轨迹。结果如下图所示
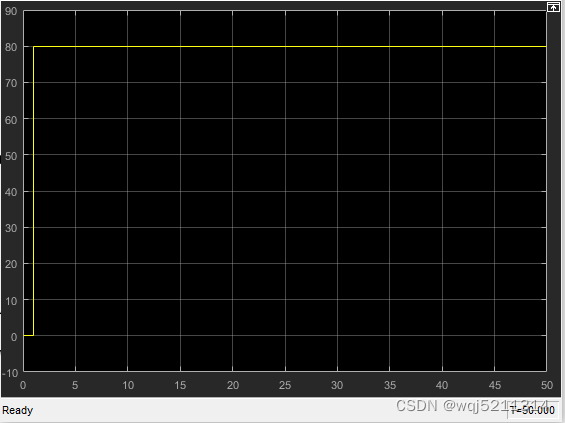
图6. 方向盘转角
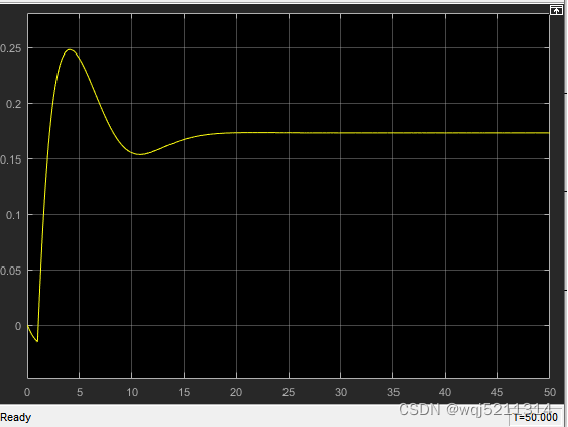
图7. 横摆角速度
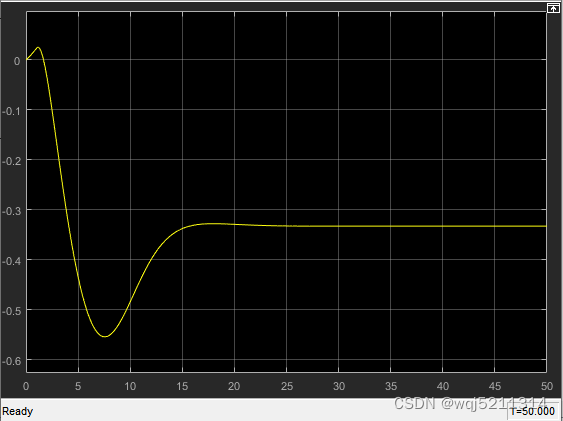
图8. 质心侧偏角
说明: 在
角较小时成立
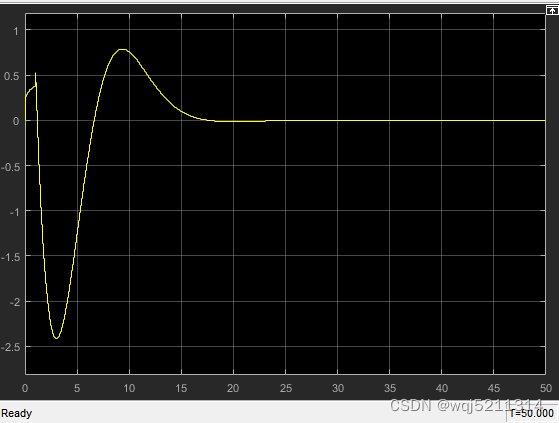
图9. 侧向加速度
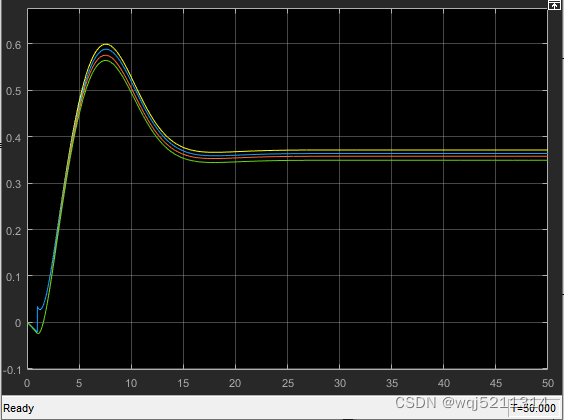
图10. 四轮轮胎侧偏角
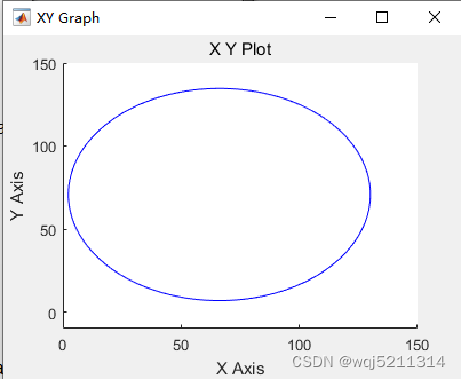
图11. 汽车行驶轨迹图
这里的行驶轨迹的求解由图3可以得出:
五、建模注意事项
1.在垂直载荷的输入是,注意和魔术轮胎要求的垂直载荷单位一致;
2.方向盘转角的输入,必须乘以相应的转速比,比进行角度和弧度的换算;
六、参考文献;
(3条消息) 七自由度车辆稳定性数学模型和simulink求解_studyer_domi的博客-CSDN博客_七自由度车辆动力学模型
七自由度车辆模型浅谈 - 知乎 (zhihu.com)
车辆操作动力学理论与应用
声明:本文的撰写仅作为学习,转载标明出处。